 2015-02-27
2015-02-27 7726
7726Элементом автоматики называется часть устройства автоматической системы, в которой происходят качественные или количественные преобразования физической величины. Поскольку элементы отдельного устройства взаимосвязаны между собой, то второй задачей элементов автоматики является передача преобразованного воздействия от предыдущего звена к последующему.
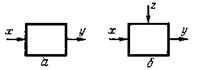
Рис. 7. Общее обозначение элемента автоматики: а — без дополнительного источника энергии; б — с дополнительным источником энергии.
В общем виде любой элемент автоматики можно представить как преобразователь энергии, на вход которого подается некоторая величина х, а с выхода снимается величина у (рис. 7). В связи с этим величину х называют входным, а величину у — выходным сигналом элемента автоматики. В одних элементах величина х преобразуется в величину у за счет энергии входного сигнала х (рис. 7, а), а в других для этого необходим дополнительный источник энергии 2 (рис. 7, б).
К основным, получившим наибольшее распространение, элементам автоматики следует отнести в первую очередь датчики, усилители, стабилизаторы, реле, распределители, двигатели, исполнительные механизмы, регулирующие органы, логические и функциональные элементы.
Датчиком называется устройство, преобразующее контролируемую или управляемую величину в выходной сигнал, удобный для передачи и дальнейшей обработки. Выходной сигнал электрического датчика может представлять собой электрическую величину (ток, электродвижущая сила) или параметр электрической цепи (активное, индуктивное, емкостное сопротивление).
По структуре датчики состоят из одного или нескольких элементарных преобразователей, в которых происходит преобразование одной физической величины в другую или количественное изменение одной и той же физической величины. Важнейшим из элементарных преобразователей является первый, воспринимающий контролируемую величину. Его называют воспринимающим органом или чувствительным элементом, а иногда измерительным органом.
Усилитель — это устройство, которое, не изменяя физической природы входного сигнала, производит лишь усиление, то есть увеличение его до требуемых значений.
Стабилизатором называется устройство, которое автоматически поддерживает постоянным значение выходной величины у независимо от изменений в определенных пределах входной величины х. Различные виды характеристик стабилизаторов показаны на рисунке 8. Чем ближе участок характеристики, соответствующий определенному диапазону изменений входной величины х, к горизонтальной прямой, тем точнее и лучше стабилизация. В устройствах автоматики широко используют стабилизаторы постоянных и переменных напряжений и токов. Существуют также стабилизаторы давления, магнитного потока и других параметров.
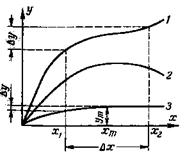
Рис. 8. Статическая характеристика стабилизатора.
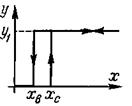
Рис. 9. Статическая характеристика реле.
Реле представляет собой устройство, в котором при достижении определенного значения входной величины х выходная величина у изменяется скачкообразно и до некоторого постоянного значения. Так, в диапазоне изменения входной величины х от 0 до хс (рис. 9) выходная величина у равна нулю. При х = хс происходит срабатывание реле, выходная величина у скачком изменяется от 0 до у1 и остается практически неизменной, несмотря на дальнейшее увеличение х. В исходное положение реле возвращается при х = хв, и выходная величина у скачком уменьшается до нуля.
Распределитель — это коммутационное устройство, которое последовательно во времени и в заданном порядке подключает одну электрическую цепь к ряду других цепей (или наоборот). Распределители применяются в основном в устройствах шифрации и дешифрации различных команд управления и сигналов информации при передаче их на расстояние.
Двигателем называется устройство, в котором энергия того или иного вида преобразуется в механическую.
В автоматике и телемеханике используются электрические, гидравлические и пневматические двигатели небольшой мощности. В автоматических системах двигатели часто являются составной частью исполнительных механизмов и позволяют в широком диапазоне регулировать скорость или изменять направление вращения, а также перемещать регулирующие органы.
Регулирующий орган — это устройство, осуществляющее непосредственное управляющее воздействие на объект управления. В качестве регулирующих органов используются различные вентили, золотники, дроссели, реостаты, заслонки, дозаторы и т. д. Исполнительный механизм — сервомотор, серводвигатель, сервопривод — объединяет двигатель, регулирующий орган и вспомогательные элементы.
Логическими и функциональными элементами называются устройства, осуществляющие определенные логические операции и функциональные зависимости между входными и выходными величинами. Эти элементы обычно используют в схемах вычислительных машин, а также применяют в дискретных схемах автоматического контроля, защиты и управления. С их помощью выполняется в основном бесконтактное преобразование измеряемых сигналов в вид, удобный для передачи и использования в других элементах.
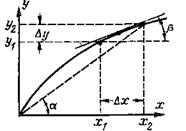
Рис. 10. Статическая характеристика элемента автоматики.
Элементам автоматики независимо от их назначения присущ ряд общих параметров: характеристики в статическом и динамическом режимах, передаточный коэффициент (чувствительность, коэффициент усиления, коэффициент стабилизации), погрешность, порог чувствительности.
Для каждого элемента автоматики в установившемся режиме существует определенная зависимость у=f(x) между входным сигналом х и выходным у, называемая статической характеристикой элемента (рис. 10). Такие характеристики рассматривают при неизменных во времени величинах х и у, то есть в статическом режиме.
Статические характеристики (рис. 11) элементов автоматики по виду можно разделить на три группы: линейная (а), у которой динамический передаточный коэффициент положителен для всех значений х, нелинейная непрерывная (б) и нелинейная разрывная (в)
В зависимости от вида статической характеристики элементы автоматики делят на однотактные и двухтактные (реверсивные). У двухтактных элементов знак выходной величины изменяется на обратный при изменении знака входной величины (рис. 12).
Условия работы элемента автоматики, когда его входная величина х и выходная величина у являются не установившимися, а изменяются во времени, называют динамическим режимом.
Поскольку элементы автоматики, как правило, обладают определенной инерционностью, выходная величина изменяется в динамическом режиме с некоторым запаздыванием по отношению к изменению входной величины. Инерционные свойства элементов определяют работу систем автоматики в динамическом режиме и имеют решающее значение при анализе качественной и количественной сторон работы устройств автоматики. После скачкообразного изменения входной величины (рис. 13, а) выходная величина достигает своего установившегося значения не сразу, а через некоторое время tY, в течение которого в элементе происходит переходный процесс. Как известно, переходный процесс может быть затухающим апериодическим (рис. 13, б) или затухающим колебательным (рис. 13, в).
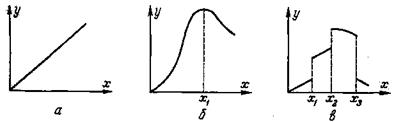
Рис. 11. Разновидности статических характеристик элементов автоматики:
а — линейная k c =kд = const; б — нелинейная непрерывная kc ≠ kд ≠ const; е — нелинейная разрывная kc ≠ kд ≠ const.
Передаточный коэффициент элемента представляет собой отношение выходной величины у к входной х или отношение приращения Δ у к приращению Δ х. В первом случае речь идет о статическом передаточном коэффициенте
 (8)
(8)
а во втором — о динамическом
 (9)
(9)
где Δ у=у2- у1, Δ х=х 2- х1
Когда статическая характеристика элемента автоматики линейна, эти коэффициенты постоянны и равны между собой при всех значениях х и у. Численные значения их при одинаковых масштабах по осям х и у равняются тангенсу угла наклона характеристики: k с = = tg α и k Д = tg β (см. рис. 10). Единица измерения передаточного коэффициента определяется отношением единиц измерения входной и выходной величин. Например, для усилителя и стабилизатора он будет безразмерным, а для индуктивного датчика перемещения — размерным (В/м), поскольку единица измерения входной величины — метр, а выходной —- вольт. В тех случаях, когда более удобен безразмерный коэффициент, обращаются к относительному передаточному коэффициенту:
 (10)
(10)
где хн и ун — номинальные значения входной и выходной величин элемента.
Знак передаточного коэффициента может быть положительным или отрицательным в зависимости от вида статической характеристики элемента (см. рис. 11).
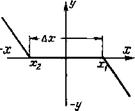
Рис. 12. Порог чувствительности:
Х1 и X2 — значения порога чувствительности; ΔX=|X1|+|X2|— зона нечувствительности.
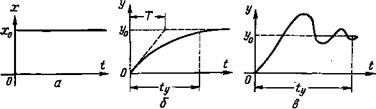
Рис. 13. Графики переходного процесса в элементе автоматики:
а — скачкообразное изменение входной величины; б — апериодический переходный процесс; в = колебательный переходный процесс.
Применительно к датчикам и некоторым другим элементам статические и динамические передаточные коэффициенты называют статическими и динамическими коэффициентами чувствительности, а применительно к усилителям — коэффициентами усиления.
Для стабилизаторов принимают во внимание обычно относительный коэффициент стабилизации, который представляет собой отношение относительного изменения входной величины к относительному изменению выходной, то есть является обратной величиной относительного передаточного коэффициента:
 (11)
(11)
Погрешностью называется отклонение выходной величины от ее расчетного номинального значения вследствие изменения внутренних свойств элемента (износ, старение) и внешних условий (изменение напряжения питания, температуры или влажности окружающей среды и т. п.). При оценке элементов автоматики, как и в измерительной технике, используют абсолютную и относительную погрешности.
В зависимости от причин, вызывающих погрешности, различают температурные, конструктивные, погрешности от колебания напряжения и др.
Разность между значениями выходной величины в динамическом и в новом установившемся режимах называется динамической погрешностью.
В одних устройствах автоматики при небольшом изменении входной величины выходная остается неизменной. Это явление объясняется наличием в отдельных узлах элементов трения, свободного хода (люфта), гистерезиса и т. п. Количественная сторона этого явления оценивается порогом чувствительности, под которым понимают наименьшее значение входной величины, способное вызвать изменение выходной величины (см. рис. 12).
В других устройствах автоматики при постоянстве входной величины возникают самопроизвольные изменения выходной. Это объясняется внешними влияниями (изменение условий окружающей среды) и внутренними причинами (например, старение элементов). Нестабильность выходной величины при постоянстве входной применительно к области назначения элемента автоматики называют по-разному: помехи, шумы, плавание нуля, дрейф коэффициента усиления и т. п.

