 2015-02-04
2015-02-04 3768
37681. Анализ механизмов:
1.1 структурный
1.2 кинематический
1.3 динамический
2. Синтез механизмов
Лекционный курс ТММ базируется на знаниях полученных вами на младших курсах при изучении физики, высшей и прикладной математики, теоретической механики, инженерной графики. Знания, навыки и умения, приобретенные вами при изучении ТММ, служат базой для курсов основы конструирования, системы автоматизированного проектирования, проектирование специальных машин.
Теория механизмов и машин - научная дисциплина (или раздел науки), которая изучает строение (структуру), кинематику и динамику механизмов в связи с их анализом и синтезом. (И.И.Артоболевский)
Цель ТММ - анализ и синтез типовых механизмов и их систем.
При анализе механизм/машина разделяется на отдельные элементы и изучаются свойства и поведение отдельных элементов.
При синтезе происходит проектирование механизмов/машин с заданными структурными, кинематическими, динамическими свойствами для осуществления требуемых движений
Задачи ТММ: разработка общих методов исследования структуры, геометрии, кинематики и динамики типовых механизмов и их систем.
Типовыми механизмами будем называть простые механизмы, имеющие при различном функциональном назначении широкое применение в машинах, для которых разработаны типовые методы и алгоритмы синтеза и анализа.
Рассмотрим в качестве примера кривошипно-ползунный механизм. Этот механизм широко применяется в различных машинах: двигателях внутреннего сгорания, поршневых компрессорах и насосах, станках, ковочных машинах и прессах. В каждом варианте функционального назначения при проектировании необходимо учитывать специфические требования к механизму. Однако математические зависимости, описывающие структуру, геометрию, кинематику и динамику механизма при всех различных применениях будут практически одинаковыми. Главное или основное отличие ТММ от учебных дисциплин изучающих методы проектирования специальных машин в том, что ТММ основное внимание уделяет изучению методов синтеза и анализа, общих для данного вида механизма, независящих от его конкретного функционального назначения. Специальные дисциплины изучают проектирование только механизмов данного конкретного назначения, уделяя основное внимание специфическим требованиям. При этом широко используются и общие методы синтеза и анализа, которые изучаются в курсе ТММ.
Чтобы мы с вами понимали друг друга, и, чтобы вас понимали другие инженеры, определимся с понятиями.
Машина – это устройство создаваемое человеком для изучения и использования законов природы с целью облегчения физического и умственного труда, увеличения его производительности и облегчения путем частичной или полной замены человека в его трудовых и физиологических функциях. Или более кратко – машина – устройство, выполняющее механические движения для преобразования энергии, материалов и информации с целью замены или облегчения физического и умственного труда человека. Соответственно существуют энергетические, рабочие, информационные и кибернетические машины.
1. Энергетические машины - преобразующие энергию одного вида в энергию другого вида. Эти машины бывают двух разновидностей:
Двигатели, которые преобразуют любой вид энергии в механическую (например, электродвигатели преобразуют электрическую энергию, двигатели внутреннего сгорания преобразуют энергию расширения газов при сгорании в цилиндре).
Генераторы, которые преобразуют механическую энергию в энергию другого вида (например, электрогенератор преобразует механическую энергию паровой или гидравлической турбины в электрическую).
2. Рабочие машины – машины, использующие механическую энергию для совершения работы по перемещению и преобразованию материалов. Эти машины тоже имеют две разновидности:
Транспортные машины, которые используют механическую энергию для изменения положения объекта (его координат).
Технологические машины, использующие механическую энергию для преобразования формы, свойств, размеров и состояния объекта.
3. Информационные машины - машины, предназначенные для обработки и преобразования информации. Они подразделяются на:
Математические машины, преобразующие входную информацию в математическую модель исследуемого объекта.
Контрольно-управляющие машины, преобразующие входную информацию (программу) в сигналы управления рабочей или энергетической машиной.
4. Кибернетические машины - машины управляющие рабочими или энергетическими машинами, которые способны изменять программу своих действий в зависимости от состояния окружающей среды (т.е. машины обладающие элементами искусственного интеллекта).
Машинным агрегатом называется техническая система, состоящая из одной или нескольких соединенных последовательно или параллельно машин и предназначенная для выполнения каких-либо требуемых функций. Обычно в состав машинного агрегата входят: двигатель, передаточный механизм и рабочая или энергетическая машина. В настоящее время в состав машинного агрегата часто включается контрольно-управляющая или кибернетическая машина. Передаточный механизм в машинном агрегате необходим для согласования механических характеристик двигателя с механическими характеристиками рабочей или энергетической машины.
Механизмом называется система тел, предназначенная для преобразования одного вида движения в другое или для совершения определенного вида движения. Механизмы могут сочетать в себе только твердые тела, могут содержать также гидравлические, пневматические, электрические, магнитные и др. тела. По функциональному назначению механизмы могут быть механизмами двигателей, передаточными, исполнительными, управляющими, контролирующими, регулирующими, подающими, транспортирующими, питающими, считающими и др. Таким образом, вы поняли, что машины преобразуют фактически составляющие нашего мира (материального, информационного, энергетического), а механизмы, являющиеся частью машин, выполняют только роль по преобразованию движения или совершению его. Например, автомобиль – машинный агрегат, т.к. состоит из других машин и механизмов, его двигатель – машина, но коробка передач – всего лишь механизм, стеклоподъемник – механизм (если ручной), если электрический – то это уже машина.
При анализе машины, ее разбирают на отдельные составляющие, в том числе и на механизмы, затем далее сложные механизмы разделяют на более простые механизмы, далее механизмы разделяют на детали. И затем изучают отдельные части механизмов и взаимодействие деталей в них. Так вот, деталь или совокупность деталей, между которыми отсутствует относительное движение, называют звеном механизма. Например, закрылки – состоят из обшивки, нервюр или шпангоутов, лонжеронов, заклепок, но создают одну жесткую систему тел, не имеющих движения друг относительно друга. Однако детали, образующие одно звено могут и не иметь жесткой связи между собой (например, конвейерная лента с переносимым грузом), но признаком звена является отсутствие движения их друг относительно друга, и если между ними ввести жесткую связь, то кинематика системы не изменится.
Подвижное соединение соприкасающихся звеньев называют кинематической парой. Например, кисть и предплечье, дверь и стена.
Звенья, соединенные кинематическими парами, образуют кинематическую цепь.
Исходя из этого, механизмом еще называется кинематическая цепь с одним неподвижным звеном, в которой при заданном движении одного или нескольких звеньев его подвижные звенья совершают определенное движение. Таким образом, любой механизм – кинематическая цепь, но не любая цепь – механизм. Механизм должен совершать наперед заданное закономерное движение, вытекающее из задач, для которых создан механизм.
Неподвижное звено называют стойкой.
Входные звенья - звенья, которым сообщается заданное движение и соответствующие силовые факторы (силы или моменты); выходные звенья - те, на которых получают требуемое движение и силы.
Рассмотрим подробней механизмы.
Часто в названиях механизмов отражены их конструктивные признаки и характер движения входного и выходного звеньев. Мы уже говорили о кривошпно-ползунном механизме. В нем непрерывное вращательное движение входного звена 1 (кривошипа*)) преобразуется в возвратно – поступательное движение выходного звена 3 (ползуна). Этот же механизм применяется и для обратного преобразования движений (например, в двигателях внутреннего сгорания). Если ось вращения кривошипа (рис.1.1 а) расположена на оси поступательной пары, то кривошипно-ползунный механизм называется центральным, в противном случае – дезаксиальным или внеосным (рис.1.1 б), при этом под дезаксиалом понимают расстояние “е” от оси вращения кривошипа до оси поступательной кинематической пары.
Рис.1.1
Четырёхзвенный механизм (рис.1.2), называемый шарнирным четырёхзвенником, служит для преобразования одного вида вращательного движения в другое. В механизме, показанном на рис.1.2 а, звено 0 – стойка, 1 – кривошип, 2 – шатун, 3 – коромысло**), совершающее качательное движение. Такой механизм называют кривошипно-коромысловым. В зависимости от соотношения линейных размеров звеньев механизм может быть двухкривошипным (рис.1.2 б), когда звенья 1 и 3 могут совершают полный оборот, или двухкоромысловым (рис.1.2 в), если звенья 1 и 3 совершают только качательные движения. Частным случаем двухкривошипного шарнирного четырёхзвенника является шарнирный параллелограмм (рис.1.2 г), в котором законы движения входного (1) и выходного (3) звеньев полностью совпадают.
___________________________________________________________
*) Кривошипом называют звено рычажного механизма, способное совершать полный оборот.
**) Коромысло – звено механизма, участвующее в образовании двух вращательных КП 5-го класса и совершающее возвратно-вращательное движение относительно оси неподвижного шарнира.
Шатун – звено рычажного механизма, совершающее сложное, плоско-параллельное движение.
Рис.1.2
Шарнирные четырёхзвенники используются в механизмах убирающихся шасси, в механизмах управления оперением самолёта, в ковочных машинах, в механизмах портальных кранов и.т.д.
К четырёхзвенным плоским механизмам, содержащим только низшие кинематические пары 5-го класса, относят также кулисные механизмы (рис.1.3). Кулисой называют подвижное звено 3, выполняющее роль направляющей для ползуна 2, называемого кулисным камнем и совершающего относительно кулисы поступательное движение. Кулисные механизмы преобразуют вращательное движение кривошипа 1 в различные виды движения кулисы 3: во вращательное (рис.1.3 а), в возвратно-вращательное (рис.1.3 б) или в возвратно-поступательное (рис.1.3 в). Последний из рассматриваемых кулисных механизмов часто называют синусным, так как в нем при постоянной скорости вращения кривошипа перемещение кулисы 3 осуществляется по синусоидальному закону.
В механизмах с гидро- и пневмоприводами, в том числе и в
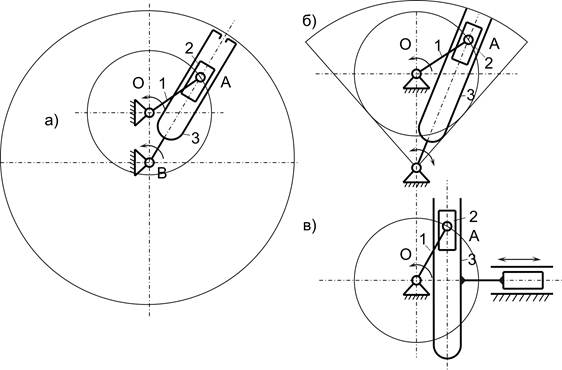
Рис.1.3
авиационных, широко используется разновидность кулисного механизма, в котором функции кулисы и камня выполняют гидроцилиндр 3 и поршень 2. На рис.1.4 изображён простейший меха-
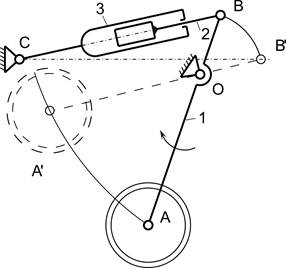
Рис.1.4
низм выпуска и уборки шасси летательного аппарата, в котором поступательное движение поршня 2 относительно цилиндра 3 преобразуется во вращательное движение стойки 1 шасси, на которой закреплено колесо самолёта.
Кинематические пары (артоболевский с 31 т1, Бауман лекция 2) разделяют по виду независимого относительного движения, числу накладываемых ограничений, виду замыкания и характеру соприкосновения звеньев. Ограничения на относительное движение звеньев называют условиями связи кинематической пары. Если на детали не накладывать связи, то каждая из них будет обладать шестью степенями свободы, т.е., в общем случае, может совершать шесть видов независимых движений (три поступательных и три вращательных). Число простейших движений может оказаться больше числа степеней свободы, если между простейшими движениями установлены функциональные зависимости (винт-гайка). Кинематические пары делят на классы в зависимости от числа условий связи. Всего классов 5. Обозначаются римскими цифрами. Класс можно определить по формуле
 ,
,
Где Н – число степеней свободы,

Например, шар, перекатывающийся по плоскости со скольжением. Данная кинематическая пара обеспечивает 5 степеней свободы (независимых простейших движений) и поэтому класс пары

Какой класс кинематической пары, представляющей собой цилиндр, вставленный в цилиндр? (IV)
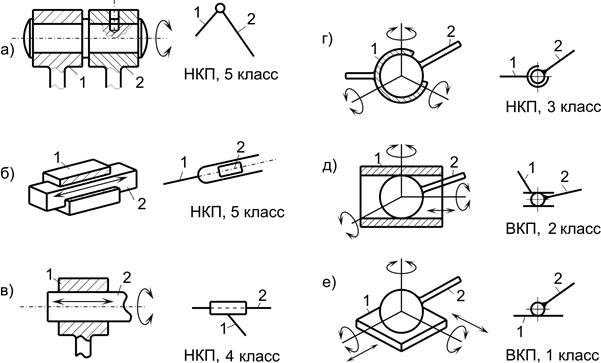
Рис. 1.5
По виду замыкание КП может быть геометрическое(а-д) и силовое(е)
Кинематические пары по характеру соприкосновения звеньев подразделяют на низшие и высшие. В низших кинематических парах (НКП) звенья соприкасаются по некоторым поверхностям (а,б,в,г), а в высших кинематических парах (ВКП) – по линии или в точке (д,е).
Одно из преимуществ НКП в сравнении с ВКП – возможность передачи больших усилий благодаря развитой поверхности контакта соприкасающихся звеньев. Применение же ВКП позволяет уменьшить потери энергии на преодоление сил трения в машинах. Так, в частности, с этой целью используются шариковые или роликовые подшипники и шарико-винтовые передачи, в которых трение скольжения заменено трением качения.
Кинематические цепи
Если точки звеньев, входящих в состав КЦ, могут перемещаться в одной и той же плоскости или в параллельных плоскостях, то кинематическая цепь называется плоской. В пространственных КЦ точки звеньев описывают пространственные кривые или плоские кривые, расположенные в непараллельных плоскостях.
Рассмотрим плоские КЦ, в состав которых входят только вращательные или поступательные пары 5-го класса. На схемах таких КЦ (рис.1.6) оси вращательных КП (цилиндрических шарниров) принято обозначать заглавными буквами русского или латинского алфавита, а звеньям КЦ – присваивать номера, используя арабские цифры.
Кинематические цепи могут быть простыми и сложными, открытыми и замкнутыми. В простой КЦ каждое из звеньев входит в состав не более двух КП (рис.1.6 а, в); в сложной КЦ есть одно или несколько звеньев, участвующих в образовании трёх и более КП (рис.1.6 б, г).
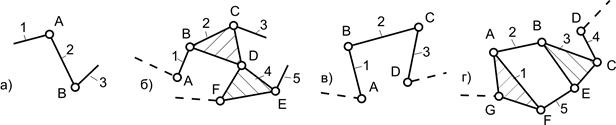
Рис.1.6
К открытым относят КЦ, в которых есть звенья, участвующие в образовании лишь одной КП (рис.1.6 а, б). В замкнутых КЦ каждое из звеньев входит в состав не менее двух КП (рис.1.6 в, г).
Класс кинематической цепи является её основной характеристикой. Класс КЦ определяется наивысшим классом замкнутого контура в её структурной схеме. Под замкнутым контуром понимается некоторый многоугольник, сторонами которого являются одно или несколько звеньев, а в его вершинах расположены кинематические пары 5-го класса (вращательные или поступательные).
Класс контура определяется количеством кинематических пар в вершинах замкнутого контура. На рис.1.7 изображены замкнутые контуры от I-го до IV-го классов. Легко представить контуры и более высоких классов.
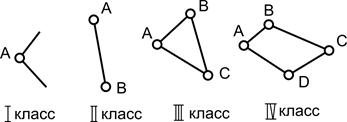
Рис.1.7
Для примера, определим класс кинематических цепей, изображённых на рис.1.6. В КЦ, представленной на рис.1.6 а, можно обнаружить три отдельных контура: два контура I-го класса (звено 1 с кинематической парой А и звено 3 с кинематической парой В) и один контур II-го класса (звено 2 с кинематическими парами А и В). Таким образом, данную КЦ следует отнести ко II-му классу.
Этому же классу соответствует КЦ, изображенная на рис.1.6 в, так как в ней имеются три контура II-го класса: звено 1 с кинематическими парами А и В, звено 2 с парами В и С, звено 3 с шарнирами С и D.
Кинематическая цепь на рис.1.6 б содержит два контура I-го класса (звено 3 с шарниром С, звено 5 с шарниром Е), один контур II-го класса (звено 1 с шарнирами А и В) и два контура III-го класса (звено 2 с шарнирами В, С и D; звено 4 с шарнирами D, Е и F). Поэтому эту КЦ следует отнести к III-му классу.
В сложных КЦ, класс которых выше lll-го, довольно часто можно обнаружить несколько замкнутых контуров различного класса, но содержащих одни и те же звенья. Класс таких КЦ определяется не количеством КП, а количеством звеньев, входящих в состав замкнутого контура. В КЦ, изображенной на рис. 1.6 г, имеется несколько контуров, класс которых выше lll-го: ABEFA – IV-го класса, ABEFGA – V-го класса, ABCEFA – V-го класса, ABCEFGA – Vl – го класса. Так как все эти контуры базируются на одних и тех же четырёх звеньях 1, 2, 3, 5, то данная КЦ относится к IV-му классу.
Вид кинематической цепи. Рассмотренные на рис.1.6 кинематические цепи содержат кинематические пары только вращательного типа. Однако, следует помнить, что на месте любой вращательной КП 5-го класса может находиться поступательная того же класса. Это принципиально не влияет на структуру и класс КЦ, но изменяет её вид.
Разнообразие видов простейших КЦ II-го класса рассмотрим позже, а виды КЦ более высоких классов устанавливают следующим образом: к первому виду относят КЦ, в состав которых входят только вращательные КП 5-го класса, а ко второму – кинематические цепи, содержащие хотя бы одну поступательную КП 5-го класса.
При таком подходе все кинематические цепи, изображённые на рис.1.6, относятся к первому виду.
Кинематические пары, входящие в состав какой-либо КЦ, подразделяют на внешние и внутренние. Под внутренними кинематическими парами понимают те, которые образованы звеньями, принадлежащими данной КЦ. В образовании внешних КП принимает участие лишь одно из звеньев КЦ, а вторым - является звено, не входящее в состав рассматриваемой КЦ. Так для КЦ, изображённой на рис.1.6 б, шарниры В, С, D и Е – это внутренние КП, а шарниры А и F – внешние. При помощи внешних КП кинематическая цепь подсоединяется к звеньям других КЦ, образуя более сложные цепи.
Порядок КЦ определяется количеством её внешних кинематических пар.
Структурная формула строения КЦ – это условная запись структуры кинематической цепи в символьной форме, содержащая полную информацию о её составе, классе, виде и порядке.
 В структурной формуле строения класс КЦ указывается римской цифрой с нижним числовым индексом, соответствующим виду КЦ, после чего в круглых скобках перечисляются (через тире) номера звеньев, входящих в состав данной КЦ. Номера тех звеньев КЦ, которые участвуют в образовании её внешних КП, в формуле строения снабжают снизу вертикальными рисками, общее число которых соответствует порядку кинематической цепи. Т.е. количество внешних связей КЦ определяет ее порядок
В структурной формуле строения класс КЦ указывается римской цифрой с нижним числовым индексом, соответствующим виду КЦ, после чего в круглых скобках перечисляются (через тире) номера звеньев, входящих в состав данной КЦ. Номера тех звеньев КЦ, которые участвуют в образовании её внешних КП, в формуле строения снабжают снизу вертикальными рисками, общее число которых соответствует порядку кинематической цепи. Т.е. количество внешних связей КЦ определяет ее порядок
Например, для четырёхзвенной кинематической цепи III-го класса, 2 вида, 3-го порядка (рис.1.8) структурная формула строения запишется следующим образом


 .
.
Контрольные вопросы к лекции 1.
1. Что является целью курса ТММ, какие задачи решаются в курсе ТММ?
2. Какие основные разделы содержит курс ТММ?
3. Какие свойства механизмов изучаются в курсе ТММ, в чем отличие предмета ТММ от специальных дисциплин?
4. Что называется "машиной", какие виды машин Вы знаете?
5. Какое техническое устройство называется "машинным агрегатом", назовите основные элементы машинного агрегата?
6. Дайте определения понятий "звено" и "кинематическая пара"?
7. Какая техническая система называется механизмом?
8. Перечислите признаки, по которым классифицируются механизмы.
9. Дайте определение понятию «машина».
10. Дайте определение понятию «кинематическая цепь»
11. Как определяется класс кинематической цепи и класс контура
12. Как определяется порядок кинематической цепи.
13. Как определить вид кинематической цепи III-го и более высоких классов.
14. Что понимают под внутренними и внешними КП.
15. Расшифровать структурную формулу строения
.
16. Какое звено называют кривошипом, коромыслом, шатуном, ползуном, кулисой.

