 2015-02-04
2015-02-04 2288
2288Этот метод, называемый ещё методом замкнутых контуров, разработан советскими учеными В.А. Зиновьевым и Н.Г. Бруевичем и устанавливает аналитическую связь между геометрическими и кинематическими параметрами движения звеньев и основан на представлении КЦ механизма в виде одного или нескольких замкнутых векторных многоугольников. Ограничиваясь рассмотрением механизмов только II-го класса, отметим, что в их кинематических цепях можно обнаружить столько замкнутых контуров, сколько групп Ассура содержится в КЦ механизма. Если звенья представить в виде векторов, то в процессе движения механизма конфигурация векторных многоугольников изменяется, но они всегда остаются замкнутыми, т.е. в любом положении механизма геометрическая сумма векторов, образующих любой из замкнутых многоугольников, равна нулю. В таком случае задача кинематического исследования механизма аналитическим методом сводится к решению векторных уравнений, отображающих условие замкнутости векторных многоугольников, путём определения на первом этапе величин и (или) направлений векторов ведомых звеньев (на этапе аналитического определения параметров, характеризующих положения ведомых звеньев, задача может быть решена путем перевода её в чисто геометрический ракурс.) в зависимости от положения векторов начальных звеньев механизма. Последующим дифференцированием по времени уравнений замкнутости контуров определяют скорости, а повторным дифференцированием – ускорения ведомых звеньев механизма.
Таким образом, при составлении и решении уравнений замкнутости, лежащих в основе аналитического метода кинематического исследования механизмов II-го класса, необходимо учитывать следующие положения:
1. количество векторных уравнений замкнутости соответствует количеству групп Ассура II-го класса, участвующих в образовании механизма;
2. уравнение замкнутости некоторой кинематической цепи, включающей данную группу Ассура, должно содержать векторы лишь тех звеньев, которые принадлежат этой группе Ассура, основному механизму или входят в состав структурных компонент, имеющим в структуре механизма более раннюю стадию наслоения, чем данная группа Ассура.
3. очередность составления и решения уравнений замкнутости, включающих векторы звеньев соответствующих групп Ассура, строго повторяет последовательность наслоения групп Ассура в механизме.
Представляя звенья механизма в виде векторов, каждый из которых характеризуется длиной  и углом ji, координирующим его направление, где i – номер, присвоенный данному звену при выполнении структурного анализа механизма, рекомендуется поступать следующим образом.
и углом ji, координирующим его направление, где i – номер, присвоенный данному звену при выполнении структурного анализа механизма, рекомендуется поступать следующим образом.
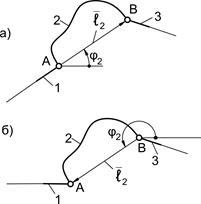 Если некоторое звено, входящее в состав рассматриваемого замкнутого контура, с двумя другими звеньями этого же контура соединено посредством вращательных кинематических пар (рис. 1.15), то независимо от действительной конфигурации звена в качестве вектора
Если некоторое звено, входящее в состав рассматриваемого замкнутого контура, с двумя другими звеньями этого же контура соединено посредством вращательных кинематических пар (рис. 1.15), то независимо от действительной конфигурации звена в качестве вектора  принимают направленный отрезок, соединяющий оси шарниров, в образовании которых принимает участие i - ое звено.
принимают направленный отрезок, соединяющий оси шарниров, в образовании которых принимает участие i - ое звено.
Углы ji, характеризующие направления векторов  , принято отсчитывать от положительного направления оси абсцисс в направлении против вращения стрелки часов.
, принято отсчитывать от положительного направления оси абсцисс в направлении против вращения стрелки часов.
 При изображении углов ji на схеме замкнутого контура через начало вектора проводят вспомогательный горизонтальный отрезок прямой, направленный вправо, и принимают его за начало отсчета угла ji, а сам угол изображают дугой окружности (с центром в начале вектора ) со стрелкой, упирающейся в вектор .
При изображении углов ji на схеме замкнутого контура через начало вектора проводят вспомогательный горизонтальный отрезок прямой, направленный вправо, и принимают его за начало отсчета угла ji, а сам угол изображают дугой окружности (с центром в начале вектора ) со стрелкой, упирающейся в вектор .
На рис. 1.15 показаны два возможных варианта выбора вектора звена 2, которые отличаются лишь углами ji, а модули вектора в обоих случаях одинаковы.
Иначе представляют векторы звеньев, участвующих в образовании поступательных кинематических пар. Пусть звенья 2 и 3 образуют поступательную пару и подсоединяются к другим звеньям некоторого замкнутого контура посредством шарниров B и C (рис. 1.16). Звено 2, являющееся направляющей для ползуна 3, представляют в виде двух взаимно перпендикулярных векторов  и
и
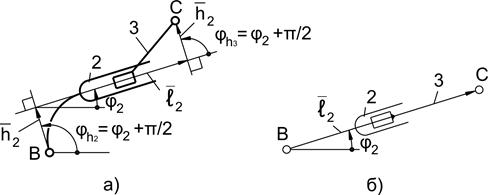
Рис.1.16
 ,а ползун характеризуют вектором
,а ползун характеризуют вектором  , причем векторы
, причем векторы  и , линии которых проходят через оси шарниров В и С, характеризуют удаления осей этих шарниров от оси поступательной пары и в любой момент времени длины этих векторов одни и те же. Вектор , изменяющийся в общем случае по величине и направлению, характеризует текущее расстояние между осями шарниров В и С вдоль оси поступательной пары. В соответствии со сказанным, углы, определяющие направления оговоренных выше векторов связаны соотношениями:
и , линии которых проходят через оси шарниров В и С, характеризуют удаления осей этих шарниров от оси поступательной пары и в любой момент времени длины этих векторов одни и те же. Вектор , изменяющийся в общем случае по величине и направлению, характеризует текущее расстояние между осями шарниров В и С вдоль оси поступательной пары. В соответствии со сказанным, углы, определяющие направления оговоренных выше векторов связаны соотношениями:  .
.
Если удаления h обоих шарниров от оси поступательной пары равны нулю (рис. 1.6,б), обоим звеньям будет соответствовать единый вектор  , соединяющий оси шарниров В и С.
, соединяющий оси шарниров В и С.
Рассмотрим в заключение вариант, когда одно из звеньев некоторого замкнутого контура участвует в образовании двух поступательных КП. Таким является звено 3 на рис. 1.17. Заметим, что оси поступательных пар не могут быть параллельными из-за неопределенности в этом случае или безразличности положения жестко соединенных между собой ползунов относительно
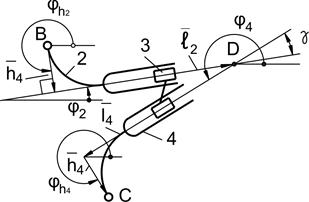
Рис.1.7
направляющих. Как и в предыдущем примере, в рассматриваемой КЦ каждое из звеньев, выполняющих роль направляющих, представляют в виде двух взаимно перпендикулярных векторов и  , причем векторы
, причем векторы  направляют вдоль осей соответствующих поступательных КП, а векторы проходят через оси шарниров. Так, кинематическую цепь, изображенную на рис. 1.17 и содержащую сдвоенный ползун 3, направляющими для которого являются звенья 2 и 4, представляют в виде цепочки векторов
направляют вдоль осей соответствующих поступательных КП, а векторы проходят через оси шарниров. Так, кинематическую цепь, изображенную на рис. 1.17 и содержащую сдвоенный ползун 3, направляющими для которого являются звенья 2 и 4, представляют в виде цепочки векторов  ,
,  ,
,  ,
,  , где
, где  = const,
= const,  =const.
=const.
Конкретные примеры рассмотрим на практическом занятии.
Контрольные вопросы.
- Напишите формулу Сомова-Малышева.
- Напишите формулу Чебышева.
- Что такое обобщенная координата.
- Какое звено называют начальным.
- В чем заключается принцип структурного синтеза механизмов, предложенный Л.В. Ассуром.
- Что называется основным механизмом.
- Что называется отдельным начальным звеном.
- Что называется группой Ассура.
- Запишите формулу Чебышева для групп Ассура.
- Какие методы кинематического исследования механизмов вы знаете.
- В чем заключается аналитический метод кинематического исследования рычажных механизмов.

