 2015-02-14
2015-02-14 615
615Построим в системе прямоугольных координат  область допустимых решений задачи (рис.11). Для этого, заменяя каждое из неравенств (5.5) равенством, строим соответствующую ему граничную прямую область допустимых решений задачи (рис.11). Для этого, заменяя каждое из неравенств (5.5) равенством, строим соответствующую ему граничную прямую  (i = 1, 2, …, r)
(i = 1, 2, …, r)
| 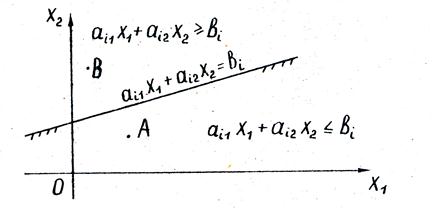 Рис. 11
Рис. 11
|
Эта прямая делит плоскость на две полуплоскости. Для координат  любой точки А одной полуплоскости выполняется неравенство
любой точки А одной полуплоскости выполняется неравенство  , а для координат любой точки В другой полуплоскости - противоположное неравенство
, а для координат любой точки В другой полуплоскости - противоположное неравенство  . Координаты любой точки граничной прямой удовлетворяют уравнению
. Координаты любой точки граничной прямой удовлетворяют уравнению  .
.
Для определения того, по какую сторону от граничной прямой располагается полуплоскость, соответствующая заданному неравенству, достаточно «испытать» одну какую-либо точку (проще всего точку О (0;0)). Если при подстановке её координат в левую часть неравенства оно удовлетворяется, то полуплоскость обращена в сторону к испытуемой точке, если же неравенство не удовлетворяется, то соответствующая полуплоскость обращена в противоположную сторону. Направление полуплоскости показывается на чертеже штриховкой. Неравенствам  и
и  соответствуют полуплоскости, расположенные справа от оси ординат и над осью абсцисс.
соответствуют полуплоскости, расположенные справа от оси ординат и над осью абсцисс.
На рисунке строим граничные прямые и полуплоскости, соответствующие всем неравенствам.
Общая, часть (пересечение) всех этих полуплоскостей будет представлять собой область допустимых решений данной задачи.
При построении области допустимых решений в зависимости от конкретного вида системы ограничений (неравенств) на переменные может встретиться один из следующих четырех случаев:
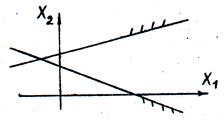 Рис. 12. Область допустимых решений пустая, что соответствует несовместности системы неравенств; решения нет.
Рис. 12. Область допустимых решений пустая, что соответствует несовместности системы неравенств; решения нет.
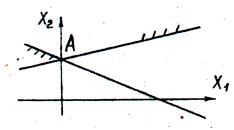
Рис. 13. Область допустимых решений изобра- жается одной точкой А, что соответствует единственному решению системы.
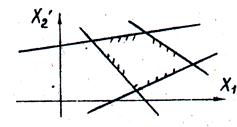 Рис. 14. Область допустимых решений ограниченная, изображается в виде выпуклого многоугольника. Допустимых решений бесконечное множество.
Рис. 14. Область допустимых решений ограниченная, изображается в виде выпуклого многоугольника. Допустимых решений бесконечное множество.
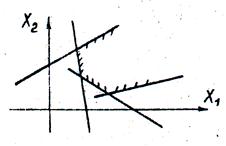 Рис. 15. Область допустимых решений неограни-ченная, в виде выпуклой многоугольной области. Допустимых решений бесконечное множество.
Рис. 15. Область допустимых решений неограни-ченная, в виде выпуклой многоугольной области. Допустимых решений бесконечное множество.
Графическое изображение целевой функции  при фиксированном значении R определяет прямую, а при изменении R - семейство параллельных прямых с параметром R. Для всех точек, лежащих на одной из прямых, функция R принимает одно определенное значение, поэтому указанные прямые называются линиями уровня для функции R.
при фиксированном значении R определяет прямую, а при изменении R - семейство параллельных прямых с параметром R. Для всех точек, лежащих на одной из прямых, функция R принимает одно определенное значение, поэтому указанные прямые называются линиями уровня для функции R.
Вектор градиента  , перпендикулярный к линиям уровня, показывает направление возрастания R.
, перпендикулярный к линиям уровня, показывает направление возрастания R.
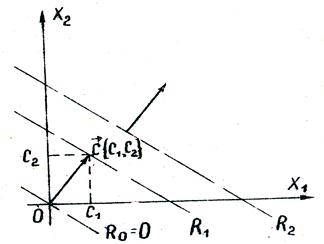 Задача отыскания оптимального решения системы неравенств (5.5), для которого целевая функция R (5.7) достигает максимума, геометрически сводится к определению в области допустимых решений точки, через которую пройдет линия уровня, соответствующая наибольшему значении параметра R
Задача отыскания оптимального решения системы неравенств (5.5), для которого целевая функция R (5.7) достигает максимума, геометрически сводится к определению в области допустимых решений точки, через которую пройдет линия уровня, соответствующая наибольшему значении параметра R
.
Рис. 16
Если область допустимых решений есть выпуклый многоугольник, то экстремум функции R достигается, по крайней мере, в одной из вершин этого многоугольника.
Если экстремальное значение R достигается в двух вершинах, 'то такое же экстремальное значение достигается в любой точке на отрезке, соединяющем эти две вершины. В этом случае говорят, что задача имеет альтернативный оптимум.
В случае неограниченной области экстремум функции R либо не существует, либо достигается в одной из вершин области, либо имеет альтернативный оптимум.








