 2015-02-04
2015-02-04 1292
1292В зависимости от элементной основы систем автоматики различают электроприводы с релейно-контактным, электромашинным и бесконтактным управлением.
В соответствии с этим можно назвать следующие применяющиеся в настоящее время системы управления электроприводами:
1.Системы релейно-контакторного управления состоят из двигателя постоянного или переменного тока, магнитного пускателя или контроллера, командоконтроллера и ящиков сопротивлений (в схемах на постоянном токе).
2.Систему генератор — двигатель (Г—Д) применяют в электродвигателях большой и средней мощности с плавным регулированием скорости в широких пределах.
3.Систему Г — Д с питанием цепей возбуждения от ЭМУ, которые используют в качестве возбудителей и подвозбудителей — это так называемая каскадная система возбуждения (рис. 9.64) крупных генераторов и двигателей. Каскадная система возбуждения позволяет уменьшить габаритные размеры аппаратов и облегчить процесс управления.
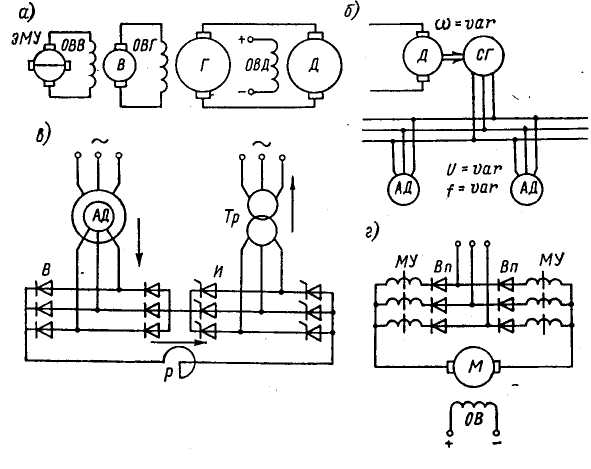
Рис. 9.64. Система Г- Д с каскадным возбуждением (а), система Д – Г – АД (б), асинхронно-вентильный каскад (в) и система МУ – Д (г)
4.Систему ЭМУ — Д применяют в установках небольшой мощности (до 10 кВт),работающих с частым реверсированием.
5.Систему частотного регулирования асинхронного двигателя с использованием машинного преобразователя частоты (система Д—СГ—АД) применяют в многодвигательных приводах с одинаковым режимом работы двигателей (рис. 9.64, б).
6.Систему тиристорный преобразователь — двигатель (ТП—Д) в настоящее время во многих случаях используют вместо системы Г-Д.
7.Асинхронно-вентильный каскад служит для регулирования скорости асинхронного двигателя с фазным ротором на основании опорной ЭДС ротора (рис.9.64, в). Этот и большое число других каскадов применяют в установках большой мощности, где необходима реализация мощности скольжения асинхронного двигателя.
8.Система магнитный усилитель – двигатель (МУ – Д) позволяет с помощью малой мощности управления контролировать скорость, ток и напряжение двигателей постоянного тока (рис.9.64, г). На судах применяется ограниченно, в системах автоматики.
9.Система источник тока — двигатель (ИТ—Д) с применением преобразователя источника ЭДС в источник тока позволяет регулировать электромагнитный момент двигателя изменением потока полюсов и обеспечивает его работу на абсолютно мягкой механической характеристике.
10.Микропроцессорные системы управления – с применением цифровой информации в двоичном коде. Источником информации о состоянии ЭП являются датчики тока, напряжения, температуры, скорости и др. Для обработки информации в МП сигналы с этих датчиков преобразуются в цифровой двоичный код.
7. Единая система конструкторской документации (ЕСКД), классификация, построение и правила чтения электрических схем.

