 2015-02-18
2015-02-18 898
898Привод предназначен для приведения в действие рабочего органа. В качестве рабочего органа могут выступать барабаны грузоподъемных механизмов и ленточных конвейеров (рисунок 1, а), звездочки тяговых цепей цепных и скребковых конвейеров (рисунок 1, б), шнек винтовых конвейеров (рисунок 1, в) и др.
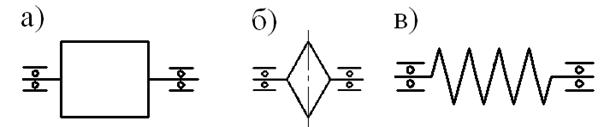
а – барабан; б – звездочка; в - шнек
Рисунок 1 – Виды рабочих органов
При работе механизмов для приведения в действие которых необходим рабочий орган на нем возникают нагрузки, которые привод должен преодолеть. В качестве таких нагрузок могут служить окружное усилие  , Н или крутящий момент
, Н или крутящий момент  .
.
Кроме того, рабочий орган должен обеспечивать движение тяговых канатов, лент, тросов, цепей исполнительного механизма с определенной линейной скоростью  или вращаться с определенной угловой скоростью
или вращаться с определенной угловой скоростью  .
.
Поэтому данные параметры рабочего органа будут являться исходными данными для энерго-кинематического расчета привода.








