 2015-03-07
2015-03-07 305
305Сведем ранее полученные основные выражения в систему и запишем следующую систему соотношений в относительных единицах.
При рассмотрении типовых сред мы говорили, что обобщающее выражение для напряжения выглядит как
где  - значение относительного магнитного потока
- значение относительного магнитного потока  , а обобщенную относительную скорость
, а обобщенную относительную скорость  мы определили как
мы определили как  . Назовем это равенство электрическим равновесием.
. Назовем это равенство электрическим равновесием.
Когда рассматривали магнитное поле, мы говорили, механический момент  всегда уравновешивается электромагнитным противомоментом
всегда уравновешивается электромагнитным противомоментом  , поэтому записали равенство
, поэтому записали равенство
где  - относительное значение магнитного потока, а
- относительное значение магнитного потока, а  - относительное значение активного тока.
- относительное значение активного тока.
Назовем это равенство электромеханическим равновесием.
И, наконец, относительное значение реактивного тока  мы определили как произведение относительного значения магнитного потока
мы определили как произведение относительного значения магнитного потока  на величину зазора
на величину зазора  .
.
Назовем это равенство электромагнитным равновесием.
Эти соотношения являются основой для решения всех практических задач судовой электромеханики. Поэтому назовем эту систему соотношений фундаментальной.
Рассмотрим следующий итоговый рис. 8.1.
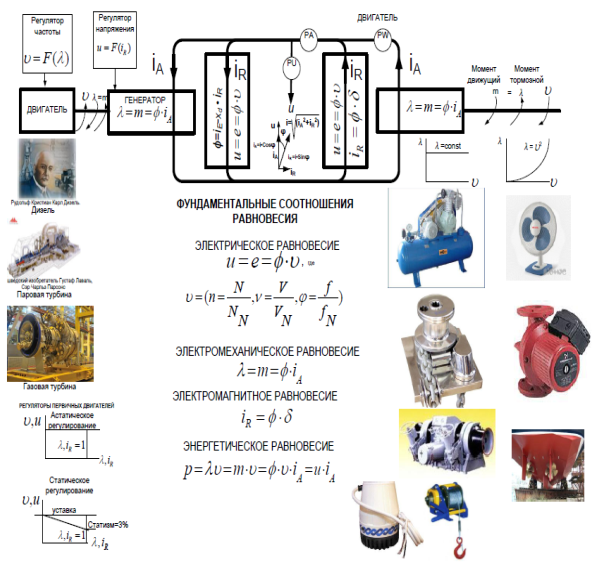
Рис. 8.1. Итоговый рисунок для представления судовой
электромеханической системы
Слева помещен источник частоты вращения (двигатель). Это может быть тепловой двигатель - дизель, паровая или газовая турбина или любой другой механизм в режиме источника частоты вращения.
Как известно, тепловые двигатели, которые рассматриваются нами в качестве источников частоты вращения, снабжаются регуляторами частоты вращения выходного вала (в самом общем случае). В результате такие источники могут строго поддерживать частоту вращения при всех рабочих значениях момента на валу, т.е. во всех режимах работы. В таком случае говорят, что источник имеет астатическую характеристику (не зависящую от режима работы частоту вращения вала) в стационарном или статическом режиме (когда все параметры работы стабилизировались после переходного процесса - переходный процесс закончился).
Однако, в случае необходимости параллельной работы рассматриваемого источника с другими агрегатами – источниками, он должен иметь характеристику, зависящую от момента (в настоящем вводном курсе эта сторона работы не обсуждается). В этом случае регулятор должен обеспечивать некоторое снижение частоты вращения фланца съема мощности по мере нарастания нагрузки. Это снижение частоты вращения регулируется. Частота вращения на холостом ходу называется уставкой. А разность между частотой вращения на холостом ходу и частотой вращения при номинальном моменте в отношении к номинальной частоте называют статизмом.
Таким образом, благодаря регуляторам всё разнообразие источников частоты вращения можно разделить на две основные группы. А именно, двигатели с астатическим или статическим регулированием.
В качестве нагрузки для теплового двигателя – источника частоты вращения нас интересует электрогенератор, ротор которого соединен с фланцем съема мощности двигателя, а напряжение на клеммах генератора поддерживается постоянным при помощи регулятора напряжения. При этом непременно должно быть выполнено условие электромеханического равновесия в системе двигатель - генератор.
Далее на рисунке перечислены приведенные выше соотношения равновесия: электрического, механического и магнитного. В центре приведены расшифровки относительных значений.
Справа изображены различные механизмы, которые являются потребителями. Все многообразие механизмов, используемых в качестве нагрузки электрогенератора, разделим на две основные группы.
Первая группа - механизмы с независимым от частоты вращения моментом сопротивления (компрессоры, шпили, брашпили, лебедки и другие подъемные механизмы, а также различные поршневые насосы и тому подобные механизмы).
Вторая группа - механизмы, которые имеют квадратичную зависимость момента от частоты (различного рода вентиляторы, центробежные насосы, винтовые движители и другие механизмы, имеющие лопасти).
Условно их называют механизмами с компрессорной и вентиляторной характеристикой соответственно.
В верхней части рисунка дается структурная схема судового электропривода. Справа — образ всех работающих механизмов, соответствующий сумме всех подключенных на рассматриваемый момент электрических механизмов. Слева — образ генераторных установок. Для упрощения усвоения материала рассмотрим только работу синхронного генератора.
В обмотку ротора подается ток  . Ток в обмотках ротора создает магнитный поток. Ротор вращается. От этого магнитные силовые линии пересекают проводники обмотки статора, создавая в них ЭДС. ЭДС без напряжения не бывает. Поэтому на выходе синхронного генератора имеет место, в силу закона равновесия ЭДС, равное и противоположное напряжение. Соответственно, имеет место электрическое равновесие, которое определяет магнитный поток. Но электрическое равновесие справедливо и для механизмов. Поэтому в каждом из них появится такой же магнитный поток (в относительных единицах), который будет так же вращаться, как и в генераторе. Относительные значения частоты вращения магнитного потока генератора и механизмов потребителей строго одинаковы. Итак, магнитный поток в системе определен напряжением и частотой вращения.
. Ток в обмотках ротора создает магнитный поток. Ротор вращается. От этого магнитные силовые линии пересекают проводники обмотки статора, создавая в них ЭДС. ЭДС без напряжения не бывает. Поэтому на выходе синхронного генератора имеет место, в силу закона равновесия ЭДС, равное и противоположное напряжение. Соответственно, имеет место электрическое равновесие, которое определяет магнитный поток. Но электрическое равновесие справедливо и для механизмов. Поэтому в каждом из них появится такой же магнитный поток (в относительных единицах), который будет так же вращаться, как и в генераторе. Относительные значения частоты вращения магнитного потока генератора и механизмов потребителей строго одинаковы. Итак, магнитный поток в системе определен напряжением и частотой вращения.
Суммарный тормозной момент всех механизмов в относительных единицах, приведенных к номинальному моменту генератора:
λ=(PG(t)/PGN)х(NGN/Ni(t)),
где PG(t) — текущая на момент t мощность генератора, PGN — номинальная мощность генератора, NGN — номинальная частота вращения генератора, Ni(t) — частота вращения в момент t. Определив λ и магнитный поток ϕ, определяется и активный ток iA. Зазор у всех машин в эксплуатации неизменный, номинальный, то есть d=1.
Отсюда метод рассуждений должен быть однообразен для всех электрических механизмов:
«К электрическому механизму приложено напряжение. Напряжение уравновешивается ЭДС. Электродвижущая сила прямо пропорциональна магнитному потоку и обобщенной скорости. Скорость задана или задается. Зная скорость, определяется магнитный поток. Магнитный поток становится известен. Механический момент задается приводом. Механический момент пропорционален определенному выше магнитному потоку и активному току. Поэтому активный ток становится определенным.
Реактивный ток пропорционален магнитному потоку и зазору. Зазор известен или задается. Зазор определит реактивный ток.
Основные параметры определены в относительных единицах и являются основой для дальнейших практических выводов».
Допустим, имеем номинальную обобщенную скорость, механический момент и зазор. Как изменятся токи, если увеличить напряжение в 2 раза?
Ответ. Магнитный поток увеличится в 2 раза. Активный ток уменьшится в два раза. Реактивный ток увеличится в два раза.
Имеем номинальное напряжение, механический момент, не зависящий от обобщенной скорости (в частности, не зависящий от частоты вращения), и зазор. Как изменятся токи, если увеличить обобщенную скорость в 2 раза?
Ответ. Магнитный поток уменьшится в 2 раза, активный ток увеличится в 2 раза, реактивный ток уменьшится в 2 раза.
Имеем номинальное напряжение, механический момент и обобщенную скорость. Как изменятся токи, если увеличить зазор в 2 раза?
Ответ. Магнитный поток не изменится. Активный ток не изменится. Реактивный ток увеличится в 2 раза.
Имеем номинальный механический момент и зазор. Как изменятся токи, если увеличить напряжение и обобщенную скорость в 2 раза?
Ответ. Магнитный поток не изменится, активный ток не изменится, реактивный ток не изменится.
Идут швартовные испытания. Нагрузочное устройство представляет собой набор активных сопротивлений и индуктивных сопротивлений в виде стальных сердечников с обмоткой. Стальные сердечники имеют регулируемый зазор. Оказалось, что косинус фи равен 0,9, а по условиям испытаний надо, чтобы косинус фи был равен 0,8. Что надо сделать, чтобы косинус фи удовлетворял требованиям испытаний.
Ответ. Имеем недостаток реактивного тока. Значит, зазор надо увеличивать до тех пор, пока косинус фи не станет 0,8.
В качестве практического примера использования полученного результата решим следующие две задачи.
Пришли в Америку, стали в док. Частота сети — 60 Гц. Напряжение в доке — 420 В. Просят включить вентилятор. Надо принять решение. Следует произвести расчет с целью определения допустимости данной операции. Номинальный косинус фи практически всех электрических машин — 0,8. Это означает, что активный ток — 0,8 от номинального тока, номинальный реактивный ток — 0,6 от номинального тока. Это надо принять во внимание в начале расчета.
Приложено напряжение u = 420/380=1,105, обобщенная скорость v=60/50=1,2, магнитный поток ϕ = u/φ=1,105/1,2=0,96. Зазор остался неизменным, номинальным, равным 1, поэтому реактивный ток будет 0,96 от номинала. То есть реактивный ток будет 0,96*0.6=0,576.
Вентиляторные механизмы имеют момент, пропорциональный квадрату частоты. Поэтому момент будет 1,22=1,44. Активный ток будет (1,44/0,96)0,8=1,2. В роторе асинхронного двигателя ток равен активному току. Нагрев ротора пропорционален квадрату тока. Ротор перегреется в 1,22=1,44 раза. Общий ток будет (0,5762+1,22)^0,5=(0,33+1,44)^0,5=1,33. Перегрев статора будет 1,77, почти в 2 раза. Операция недопустима.
Те же условия. Надо принять решение относительно подъема груза на лебедке. Просят поднять половинный груз. Решаем. Приложено напряжение u = 420/380=1,105, обобщенная скорость v=60/50=1,2, магнитный поток ϕ = u/φ=1,105/1,2=0,96. Зазор остался неизменным, номинальным, равным 1, поэтому реактивный ток будет 0,96*0,6=0,58. Лебедка имеет компрессорную механическую характеристику (момент не зависит от частоты). Активный ток будет 0,5/0,96=0,52. Перегрева ротора не будет. Полный ток (0,582+0,522) ^0,5=0,336. Операция допустима.
Следующий раздел «электромеханика» будет только учить, как решить те или иные практические задачи, используя изложенный метод электрического, механического и магнитного равновесия.








