 2015-03-27
2015-03-27 2363
2363Кинематический анализ плоского рычажного механизма методом планов.
Исходные данные:  .
.
Принимаем длины звеньев  ,
,  ,
,  .
.
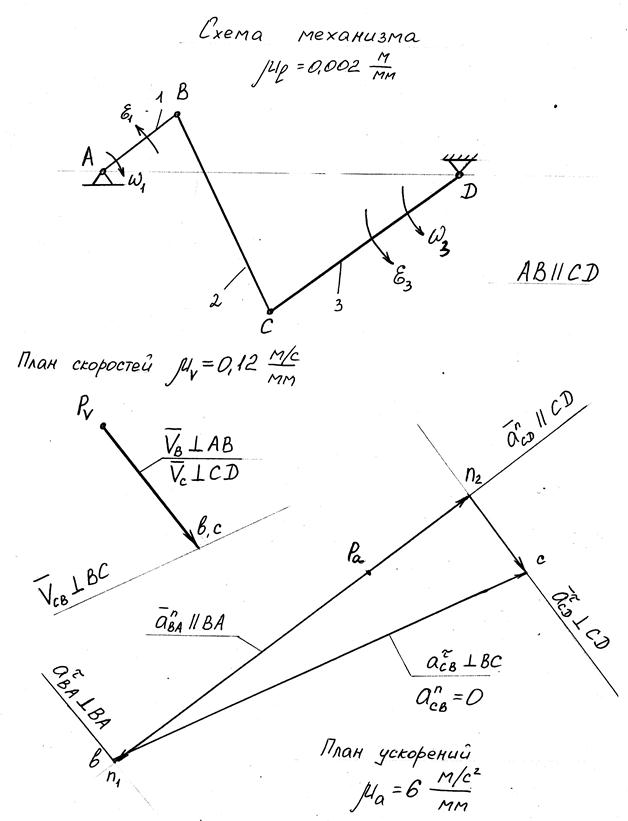
1.Построение плана механизма по заданным размерам звеньев и положению ведущего звена
Выбираем масштаб длин. Пусть длина кривошипа (звена 1) будет равна на плане 30 мм. Тогда масштабный коэффициент  .
.
В принятом масштабе строим план механизма
2.Построение плана скоростей
Кривошип АВ вращается с постоянной угловой скоростью 
Линейная скорость точки В кривошипа АВ:
 м/c,
м/c, 
Выбираем полюс плана скоростей РV. Вектор скорости точки В направлен в сторону вращения кривошипа.
Масштабный коэффициент плана скоростей
 .
.
-где  - длина вектора скорости
- длина вектора скорости  точки В.
точки В.
Определяем скорость точки С. Для этого запишем систему векторных уравнений для скорости точки С, используя свойства плоскопараллельного движения тела и сложного движения точки:
Строим план скоростей для заданного положения механизма.
 Из плана скоростей определяем длины векторов и, умножая эти значения на масштабный коэффициент плана скоростей, определяем величины абсолютной и относительной скоростей точки и звеньев механизма
Из плана скоростей определяем длины векторов и, умножая эти значения на масштабный коэффициент плана скоростей, определяем величины абсолютной и относительной скоростей точки и звеньев механизма



3. Определение мгновенных угловых скоростей звеньев механизма с помощью плана скоростей.
Модули угловых скоростей звеньев определяются как отношения скоростей относительного вращательного движения к длинам соответствующих звеньев.
Угловая скорость звена АВ:  с-1 .
с-1 .
Угловая скорость звена ВС:  .
.
Угловая скорость звена DC:  с-1.
с-1.
Направления вращения звеньев в данный момент времени указываем, исходя из направления векторов относительных скоростей на плане скоростей.
4. Построение плана ускорений механизма и определение угловых ускорений точек и звеньев
Построение плана ускорений, так же как и плана скоростей, начинаем с определения ускорения той точки, которая принадлежит входному звену механизма. Это точка В. Примем величину углового ускорения 
Абсолютное ускорение точки В будет равно сумме нормального и тангенциального ускорений
 , где
, где 
Нормальное ускорение точки В направлено вдоль звена АВ от точки В к точке А:  м/c2.
м/c2.
Тангенциальное ускорение точки В направлено перпендикулярно звену АВ в направлении углового ускорения:
 м/c2.
м/c2.
Выбираем масштабный коэффициент плана ускорений:
- где  =100 мм – величина вектора нормального ускорения
=100 мм – величина вектора нормального ускорения  .
.
Величина вектора тангенциального ускорения на плане ускорений
Найдём ускорение точки С. Для этого составляем систему векторных уравнений для ускорения точки С:
Величина нормальных ускорений звеньев 2 и 3

 м/с2.
м/с2.
Из плана ускорений определяем тангенциальные ускорения звеньев

 .
.  .
.
Определим модуль мгновенного углового ускорения звена 2как отношение касательного ускорения в относительном вращательном движении к длине звена ВС:
 .
.
Определим модуль мгновенного углового ускорения звена 3
 .
.
Направление угловых ускорений определится вектором относительного касательного ускорения.
Список литературы
1.Артоболевский И.И. Теория механизмов.- М.: Изд-во Наука, 1965.-776 с.: ил.
2.Фролов К.В. и др. Теория механизмов и механика машин: учебник, М.: «Высшая школа», 2005.
3.Козловский М.З. и др. Теория механизмов и машин: учебник, М.: «Академия», 2006.

