 2015-03-07
2015-03-07 1981
1981Частота вращения АД в соответствии с формулой имеет вид:
Отсюда следует три основных способа регулирования - изменением f1, p, и s.
а) Частотное регулирование возможно только при питании АД от отдельного синхронного генератора с переменной частотой вращения либо от преобразователя частоты. При этом необходимо соблюдать закон регулирования, который при постоянстве момента сопротивления на валу имеет вид

Частотное регулирование обычно применяют в тех случаях, когда требуется изменять частоту вращения в широких пределах, например, в тяговом электродвигателе.
б) Регулирование частоты вращения путем изменения числа пар полюсов широко применяется в АД с короткозамкнутым ротором. Регулирование здесь осуществляется ступенчато. На рис. 1 показана простейшая схема обмотки одной фазы, позволяющая изменять число полюсов в два раза. Таков принцип получения двухскоростного АД.
а) б)
Рис. 1. Схема переключения обмотки статора для изменения числа полюсов: а) 2р = 4, б) 2р = 2.
Если же нужно иметь три или четыре частоты вращения (трех- и четырехскоростной АД), то на статоре располагают еще одну обмотку, при переключении которой можно получить дополнительно еще два варианта полюсности двигателя, например, р = 3 и р = 4.
Многоскоростные АД имеют большую массу и габариты, а следовательно, и большую стоимость по сравнению с двигателем нормального исполнения. Кроме того, они не обеспечивают плавности регулирования.
в) Регулирование частоты вращения изменением скольжения применяется как в АД с короткозамкнутым ротором, так и в АД с фазным ротором.
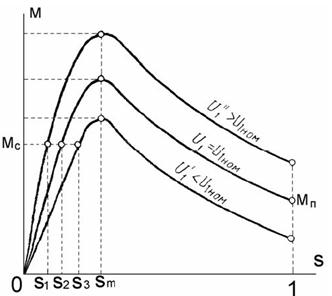 В АД с короткозамкнутым ротором этот способ реализуется за счет плавного снижения питающего напряжения. При этом максимальный момент MM ̴ U12 будет понижаться, а скольжение расти (рис.2).
В АД с короткозамкнутым ротором этот способ реализуется за счет плавного снижения питающего напряжения. При этом максимальный момент MM ̴ U12 будет понижаться, а скольжение расти (рис.2).
Рис.2. Механические характеристики АД при различных напряжениях U1
Момент, развиваемый двигателем, всегда равен моменту сопротивления (нагрузки) на его валу М = МС. Поэтому уменьшение напряжения можно производить до тех пор, пока Mm ≥ MC. При скольжении s > sm АД теряет устойчивость и опрокидывается. В соответ- ствии с этим, регулирование возможно в узких пределах sH ≤ s ≤ sm Реально для АД средней и большой мощностей, работающих с номинальной нагрузкой, удается снизить частоту вращения n на 3...5%.
У малых АД, имеющих относительно большие активные сопротивления, частоту вращения можно уменьшить на 40...50%.
Следует иметь ввиду, что увеличить r2 можно и у крупных АД на стадии их проектирования и изготовления. При этом механическая характеристика станет мягче и диапазон регулирования расширится. Однако при этом возрастут потери в обмотке ротора и понизится КПД (1% скольжения соответствует примерно 1% КПД). В крупных же электрических машинах, где борются за каждую десятую долю процента КПД из-за необходимости снижения эксплуатационных расходов, это недопустимо.
В АД с фазным ротором скольжение изменяют посредством включения в цепь добавочного активного сопротивления (рис.3).
Рис.3. Механические характеристики АД при различных добавочных сопротивлениях rд в цепи ротора
При этом скольжение может меняться в широких пределах sH ≤ s ≤ 1, т.е. практически до полной остановки двигателя. Однако наряду с плавностью и широтой диапазона регулирования имеет место большие потери энергии в регулировочном реостате, что существенно снижает энергетические показатели электропривода.
Необходимо отметить, что имеется возможность регулировать частоту вращения АД с фазным ротором без потерь энергии в реостате.
Для этого электрическую энергию, выделяющуюся в цепи ротора при скольжении (энергия скольжения), посредством преобразовательной установки передают обратно в питающую сеть переменного тока или к вспомогательному двигателю. Последний сообщает дополнительную механическую энергию валу основного двигателя. Такие электромеханические системы называют асинхронными каскадами. Существуют разнообразные каскадные схемы. Но все они имеют существенный недостаток, который сводится к возрастанию потерь в АД, а следовательно, к необходимости увеличения его габаритных размеров. Поэтому применение асинхронных каскадов можно считать рациональным только на переходном этапе, пока статические преобразователи частоты сравнительно дороги и имеют недостаточно высокую надежность.
2. Двигатели постоянного тока.
Частоту вращения можно регулировать следующими способами:
а) напряжением U, подводимым к электродвигателю;
б) добавочным сопротивлением Rд, включенным в цепь якоря, тогда
в) магнитным потоком Ф с помощью тока возбуждения, вводя реостат в цепь возбуждения.
Регулирование частоты вращения изменением напряжения питания U осуществляется уменьшением напряжения от номинального значения, что приводит к уменьшению частоты вращения (регулировка «вниз»). Этот способ регулирования позволяет сохранить высокое значение КПД, однако при этом требуется специальный регулируемый источник питания (например, система генератор - двигатель).
Искусственные характеристики при изменении U будут иметь вид прямых, показанных на рис. 6.4.
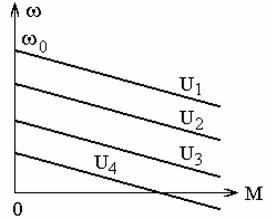
Рис. 6.4. Механические характеристики ДПТ НВ при изменении питающего напряжения питания
Регулирование частоты вращения с помощью добавочного сопротив-ления Rд в цепи якоря также является регулировкой «вниз». Механические характеристики при наличии Rд называются искусственными. Из-за больших потерь мощности в регулировочном реостате и значительном уменьшении КПД этот способ находит ограниченное применение.
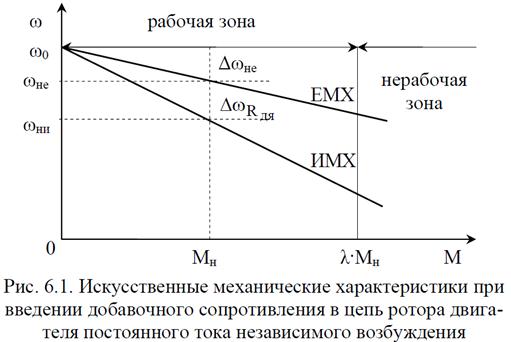
Реостатное регулирование частоты вращения осущест-вляется путем введения в цепь якоря дополнительных актив-ных сопротивлений – резисторов, т.е. Rяц = (Rя + Rдя) = var при U = Uн, Ф = Фн,. Как видно из уравнения механической характеристики
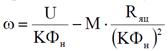
при варьировании величины добавочного сопротивления Rдя в цепи якоря скорость идеального холостого хода ω0 остается постоянной, изменяется лишь жесткость характеристики
Регулирование частоты вращения уменьшением магнитного потока осуществляется посредством реостата в цепи возбуждения и дает увеличение частоты вращения (регулировка «вверх»).
1. Асинхронные двигатели.
Для выполнения ряда производственных процессов требуется быстрое и плавное торможение АД. Электрическое торможение, в отличие от механического, является более предпочтительным.
Существует три основных способа электрического торможения: противовключение; генераторное; динамическое.
При торможении противоключением изменяют направление вращения поля путем переключения двух линейных проводов, питающих обмотку статора. Ротор при этом вращается навстречу полю со скольжением

развивая тормозной момент. Частота вращения n уменьшается до нуля, и если АД не отключить, то он начнет вращаться в обратную сторону. Таким образом осуществляется реверс, т.е. изменение направления вращения двигателя.
В начальный момент торможения имеет место большой бросок тока, для ограничения которого в цепь фазного ротора вводят реостат. При генераторном торможении частота вращения ротора n превосходит частоту вращения поля n1. Переход в генераторный режим АД происходит в электроприводах при изменении направления нагрузочного момента. На практике его часто используют для подтормаживания, т.е. для ограничения скорости механизма. Типичный пример - спуск груза краном, когда АД вращается согласно с направлением спуска и скорость движения груза ограничивается, поскольку в этом режиме электромагнитный момент является тормозящим. При этом происходит рекуперация, т.е. энергия отдается в сеть. Этот режим широко применяется для АД с переключение числа полюсов. Так, например, если при р = 1 ротор имел частоту вращения n = 3000 об/мин, то при переключении на р = 2 он будет тормозиться до n = 1500 об/мин, возвращая энергию обратно в сеть.
При динамическом торможении обмотку статора АД отключают от сети, а затем подключают к источнику постоянного тока. В результате в ЭМ появляется постоянный магнитный поток, индуктирующий в обмотке вращающегося ротора переменную ЭДС. Создается тормозной электро- магнитный момент, под действием которого ротор начинает тормозиться. При этом энергия торможения поглощается сопротивлением ротора. В этом режиме АД представляет собой обращенный синхронный генератор, в котором статор создает постоянное магнитное поле, а ротор представляет собой якорь генератора.
* Буквой U здесь обозначена ЭДС источника

