 2015-03-08
2015-03-08 13675
13675Организация мультиплексных каналов последовательной
Передачи информации
В настоящее время все большее распространение получают так называемые децентрализованные структуры обработки информации, или распределенные системы обработки данных, в которых повышение производительности достигается за счет разбиения задач, решаемых системой, на ряд независимых или слабозависимых подзадач, решение которых возлагается на ЭВМ, решаемых непосредственно в местах восприятия и измерения подлежащей обработке информации. В таких системах становится актуальной проблема организации взаимодействия этих функциональных элементов комплекса (включая и ЭВМ) в единой интегрированной системе и особенно организация обмена информацией между элементами.
Организация связей между блоками по принципу «каждый с каждым» на практике приводит к тому, что для функционирования комплекса требуется большое количество кабельных линии связи. Возникают трудности с резервированием «жизненно» важных кабельных линий вследствие их большой массы, особенно на объектах-носителях с ограниченными физическими объемами. Часто измеренную информацию приходится передавать от точек измерения через поворотные контактные устройства (например, от обзорной РЛС), число контактов у которых ограничено по конструктивным соображениям и вследствие малой их надежности. При этом возникают проблемы с резервированием контактов.
В связи с этим в настоящее время получили большое распространение и имеют перспективы развития последовательные интерфейсы связи ЭВМ и внешнего оборудования на основе моноканала с мультиплексированием сообщений или, как их часто называют, мультиплексные каналы информационного обмена (МКИО). Под мультиплексированием понимают поочередный способ передачи сообщений по одному и тому же каналу связи (временное разделение сообщений) [22].
Впервые принципы организации МКИО с программно-управляемыми потоками информации были осуществлены в США для интеграции бортового электронного оборудования при создании самолетов В-1, F-15, F-16 в начале 70-х годов. Успешный опыт реализации этих интерфейсов позволил обобщить их в виде стандарта MIL-STD-1553, который был принят в 1973 г., а затем дважды пересмотрен и уточнен (сейчас действует стандарт на МКИО MIL-SRD-1553 В).
Организация последовательного интерфейса на базе этого стандарта применяется не только в авиации (комплексы бортового оборудования самолетов и вертолетов), но и в военно-морском деле, в промышленности, автомобилестроении, при создании локальных вычислительных сетей. Принципы организации этого стандарта принимаются за основу при разработке новых последовательных интерфейсов. При этом имеется в виду сохранение основных его положительных качеств (снижение массы соединительных проводов и кабелей; возможность варьирования количества подключаемых функциональных блоков и датчиков; возможность настройки и отработки отдельных функциональных блоков и системы в целом; возможность повышения надежности путем резервирования линии; возможность организации иерархических вычислительных систем и др.). Поэтому рассмотрим более, подробно организацию мультиплексного каната в рамках указанного стандарта.
Мультиплексная линия передачи информации
Рис. 1. Структура системы с МКИО
Общая структура системы с МКИО. Система с МКИО (рис. 1) включает в себя следующие функциональные элементы:
— мультиплексную линию передачи информации (МЛПИ), обеспечивающую передачу информации между функциональными блоками различных назначений;
— оконечные устройства (ОУ), обеспечивающие сопряжение МКИО с функциональными подсистемами, формирование необходимых кодов и синхронизацию сообщений;
— контроллер системы обмена — устройство, обеспечивающее управление передачей информации между всеми функциональными подсистемами комплекса по заданной программе, а также выполняющее функции контроля передач. Для сбора и индикации информации о состоянии МЛПИ в качестве пассивного безадресного устройства к ней может подключаться монитор.
Мультиплексная линия передачи информации.
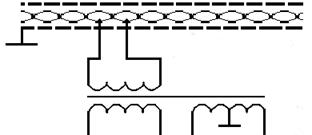
В качестве линий передачи информации используются: а — проводные линии в виде скрученных экранированных пар проводников (рис. 2) пли коаксиальных кабелей (рис. 3); б — волоконно-оптические линии (рис. 4); в — волноводные линии. Указанные линии передачи обладают различными характеристиками: пропускной способностью, помехоустойчивостью, стоимостью. Тип линии передачи влияет и на мощность, потребляемую подсоединенными системами. Экранированные скрученные пары проводов применяются в каналах с пропускной способностью до 10 Мбит/с, а коаксиальные кабели — в каналах с пропускной способностью до 10 Мбит/с. Волоконно-оптические линии позволяют достичь сверхвысокой пропускной способности каналов, достигающей 10 — 100 Мбит/с. Волноводы обеспечивают высокую скорость передачи данных, но они громоздки, дороги, малоустойчивы к механическим воздействиям и поэтому применяются значительно реже других типов линий передачи.
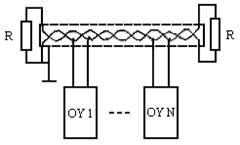
Рис. 2. Система с линией передачи, выполненной в виде экранированной скрученной пары проводов: R — согласующий резистор
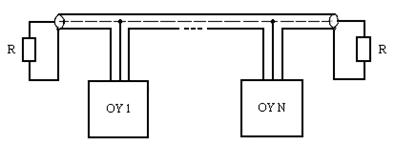
Рис. 3. Система с линией передачи на основе коаксиального кабеля:
R — согласующий резистор
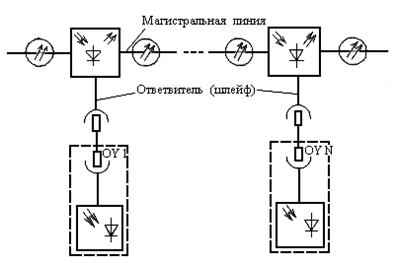
Рис. 4. Система с линией передачи на основе ВОЛС
Пропускная способность линий передачи, как проводных, так и волоконно-оптических, уменьшается примерно пропорционально их длине, т. е. с увеличением длины линии на порядок приблизительно на порядок снижается и пропускная способность. К концам проводных линий передачи данных подсоединяются согласующие резисторы, как это показано на рис. 2 и 3.
В соответствии с указанным стандартом длина магистральной линии устанавливается не более 100 м, длина соединителей не более 6 м. К магистральной линии можно подсоединить не более 32 шлейфов.
Линии передачи информации различаются также режимом работы и подразделяются на симплексные, дуплексные и полудуплексные. В симплексных, или однонаправленных, линиях информация передается только в одном направлении. Симплексный режим работы в последовательных интерфейсах используется чрезвычайно редко, так как требует большого числа линий связи. В дуплексных линиях связи информация передается в двух направлениях одновременно; в полудуплексных — в обоих направлениях, но с разделением по времени (попеременно). При дуплексном режиме работы для передачи данных и управляющих сигналов используются, как правило, отдельные линии связи. С точки зрения экономии линий связи предпочтительным является полудуплексный режим.
Мультиплексные линии передачи информации по организации управления подразделяются на одно- и многоуровневые. В одноуровневых линиях передачи все оконечные устройства связаны друг с другом только одним каналом. Многоуровневые линии объединяют группы оконечных устройств по отдельным линиям связи. Причем эти группы могут управляться независимо друг от друга, каждая по своей линии, или система линий образует иерархическую структуру, при которой линии нижнего уровня подчинены по управлению линиям верхнего уровня.
Для повышения надежности и отказоустойчивости МКИО линии передачи, а также контроллеры и оконечные устройства могут быть резервированы (двукратно и даже четырехкратно).
Оконечные устройства, подключаемые к мультиплексной линии передачи информации. Наибольшее распространение получили два способа подсоединения оконечных устройств к мультиплексной линии передачи информации: непосредственный и трансформаторный. При непосредственном способе подключения (рис. 4.2 и 4.3) обеспечиваются высокая помехозащищенность, простота электрического согласования устройств, но для гальванической развязки между устройствами необходимо применение элементов с тремя устойчивыми состояниями. Чаше применяется трансформаторный способ подсоединения, обеспечивающий гальваническую развязку, но вызывающий необходимость передачи сигналов, не имеющих постоянной составляющей. Кроме того, в обоих способах должна быть решена проблема синхронизации принимаемых по МЛПИ сигналов. Схемы МЛПИ с трансформаторным способом подключения оконечных устройств представлены на рис. 5.
Коды, используемые для передачи информации по МЛПИ. Коды, используемые для передачи сигналов по МЛПИ, называются последовательными линейными кодами. К этим кодам предъявляются требования обеспечения высокой пропускной способности, помехозащищенности, простоты синхронизации. Некоторые последовательные линейные коды изображены на рис. 6.
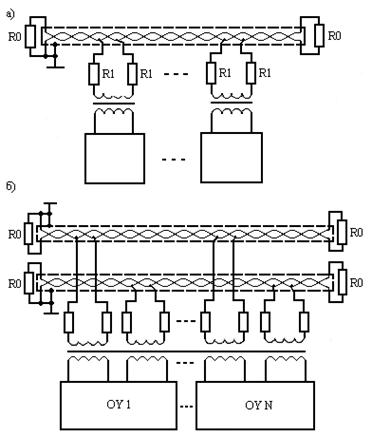
Рис. 5. Схема МКИО с трансформаторным способом подключения оконечных устройств:
а – без резервирования; б – с резервированием; R0 – 75Ом ± 5%; R1 – 56Ом ± 5%
| а) | |||||||||||||||||
| б) | |||||||||||||||||
| в) | |||||||||||||||||
| г) | |||||||||||||||||
| д) | |||||||||||||||||
| е) | |||||||||||||||||
| ж) | |||||||||||||||||
Рис. 6. Некоторые линейные коды, используемые для передачи информации
а – номер бита информации; б – логические значения битов информации; в – униполярный линейный двоичный код NRZ; г – синхросигналы; д – биполярный линейный код без возвращения к нулю; е – биполярный линейный самосинхронизирующийся двоичный код с возвращением к нулю; ж – биполярный фазоманипулированный самосинхронизирующийся линейный код без возвращения к нулю – «Манчестер-2»
Схемотехнически наиболее просто реализуется униполярный двоичный последовательный код (рис. 6. в) без возврата к нулю (NRZ — Non return to zero), в котором передаваемому значению логической 1 соответствует высокий уровень напряжения, а значению логического 0 — уровень напряжения, близкий к нулю. Однако при его применении необходим дополнительный капал для передачи синхронизирующих сигналов (рис. 6. г), что снижает помехозащищенность и уменьшает скорость передачи данных. Помехозащищенность этого кода, однако, можно несколько повысить, если передавать значения логических 1 и 0 разнополярными уровнями напряжения (рис. 6, д), а дополнительный канал синхронизации убрать, используя принципы возвращения к нулю (рис. 6, е). Но в этих вариантах кодов присутствует постоянная составляющая, что ограничивает возможность применения удобной трансформаторной связи линии с оконечным оборудованием.
Лишен отмеченных недостатков биполярный фазоманипулированный самосинхронизирующийся линейный код без возвращения к нулю — МАНЧЕСТЕР-2, представленный на рис. 6, ж. Уровень логической 1 кодируется в этом коде отрицательным перепадом сигнала в середине битового интервала, уровень логического 0 — положительным перепадом. Он просто формируется. Как следует из рис. 6, сигнал в коде МАНЧЕСТЕР-2 образуется путем сложения no mod 2 сигналов NRZ и синхронизирующих сигналов (СС), т. е. сигнал в коде МАНЧЕСТЕР-2 принимает единичные значения на тех интервалах времени, на которых сигналы NRZ и СС имеют противоположные значения. Частота передачи логических значений сигналов в МIL-STD-1553 В принята равной 1 МГц.
Управление процессом обмена информацией по мультиплексной линии. Управление процессом передачи сообщений по мультиплексной линии осуществляется отдельным контроллером (в общем случае резервированным) либо группой контроллеров. Во втором случае управление каждым из контроллеров выполняется для данной мультиплексной линии лишь в определенные фиксированные промежутки времени. Каждая подключаемая к мультиплексной линии подсистема может включать в свой состав блоки, предназначенные для выполнения функций контроллера, а также и оконечные устройства (ОУ). В связи с этим в зависимости от внешней ситуации управление передается контроллеру одной из подсистем, которая на определенный промежуток времени становится активной подсистемой, тогда как другие подсистемы, подключенные к данной МЛПИ, выполняют роль пассивных оконечных устройств.
Передача управления активной подсистеме осуществляется циклически или в соответствии с заранее назначенными приоритетами. При этом в случае отсутствия необходимой для передачи информации осуществляется опрос ОУ с целью выявления среди них того оконечного устройства, которое готово принять на себя управление МЛПИ.
Виды сообщений при организации обмена информацией по МЛПИ. Унифицировано три вида передачи сообщений:
1) от контроллера к оконечному устройству;
2) от оконечного устройства к контроллеру,
3) от оконечного устройства к оконечному устройству.
Сообщение, передаваемое по МЛПИ, состоит при этом из посылок, содержащих три типа слов: командные (К); информационные (И) и ответные (О). Виды возможных сообщений приведены на рис. 7.
| а) | К | И | - - - | И | T 1 | О | t3 | К | |||
 | | ||||||||||
| б) | К | t2 | О | И | - - - | И | t3 | К | |||
 | | ||||||||||
| в) | К1 | К2 |  t2 t2 | О2 | И | - - - |  И И | t1 | О1 | К | |
| г) | К | t2 | О | t3 | К | ||||||
 | | ||||||||||
| д) | К | И | - - - | И | t3 | К | |||||
 | |||||||||||
| е) | К1 | К2 |  t2 t2 | О2 | И | - - - |  И И | t3 | К |
Рис. 7. Виды сообщений по МЛПИ:
а – контроллер ОУ; б – ОУ контроллер; в ОУ ОУ; г – команда ответ; д – контроллер ОУ (общий режим); е – ОУ ОУ (общий режим);
t1 – пауза между последним информационным и ответным словом (2 мкс < t1 < 10 мкс);
t2 – пауза между командным и ответным словом (2 мкс < t2 < 10 мкс);
t3 – пауза между последним информационным или ответным и командным словом следующей посылки (t3 > 2 мкс);
При передаче информации от контроллера к оконечному устройству (рис. 7, а) контроллер передает вначале командное слово на прием информации. Затем следует определенное количество (от одного до 32 слов) информационных слов. Оконечное устройство после приема информации передает ответное слово, которое принимается контроллером.
При передаче информации от оконечного устройства к контроллеру (рис. 7, б) последний передает командное слово на передачу информации, приняв которое оконечное устройство передает ответное слово и определенное количество информационных слов.
При передаче информации от оконечного устройства к оконечному устройству (рис. 7, в) в обмене участвуют устройства А и Б. В этом случае контроллер формирует два последовательных командных слова, которые адресуются устройству А на прием информации и устройству Б на передачу информации (см. рис. 7, в) соответственно. Приняв адресованное ему командное слово, устройство Б передает ответное слово О2, принимаемое контроллером, и определенное количество информационных слов. В свою очередь, устройство А, приняв адресованную ему информацию, передает контроллеру ответное слово О1.
Передача, показанная на рис. 7, г, используется в служебных целях, например для выявления запросов на обслуживание ОУ, контроля состояния канала и др., а передачи, показанные на рис. 7, д, е, носят групповой характер и используются для начальной инициализации ОУ, диагностирования их состояния, размножения данных по нескольким ОУ и др.
При передаче сообщения пауза между последним информационным словом массива и ответным словом (t1) должна находиться в интервале 2 £ t1 £ 10 мкс, так же как и пауза (t2) между командным и ответным словом. А пауза между последним информационным или ответным словом и командным словом следующего сообщения (t3) должна быть не менее 2 мкс.
Сообщения от контроллера к ОУ передаются без пауз между командным и первым информационным словом массива, а также между информационными словами массива или между ответным словом передающего ОУ и первым информационным словом массива. Возможно использование и различных комбинаций рассмотренных основных видов сообщений.
Форматы слов при организации обмена информацией. Каждое слово, передаваемое по линии, состоит из сигнала пословной синхронизации, 16 информационных разрядов и разряда контроля на четность (рис. 8), причем первый после синхросигнала разряд слова является старшим разрядом (наибольшим по весу).
| a) | ||||||||||||||||||||||||||||||||||
| б) | ||||||||||||||||||||||||||||||||||
| Синхросигнал | Адрес оконечного устройства | К | Подадрес | Число информационных слов | Р | |||||||||||||||||||||||||||||
| Режим управления | Код команды управления | |||||||||||||||||||||||||||||||||
| в) | ||||||||||||||||||||||||||||||||||
| Синхросигнал | Информация (параметр) | Р | ||||||||||||||||||||||||||||||||
| Поле признаков состояния | ||||||||||||||||||||||||||||||||||
| г) | ||||||||||||||||||||||||||||||||||
| Синхросигнал | Адрес оконечного устройства | Резерв | Р | |||||||||||||||||||||||||||||||
| Неисправность оконечного устройства | ||||||||||||||||||||||||||||||||||
| Принято управление каналом | ||||||||||||||||||||||||||||||||||
| Подсистема занята | ||||||||||||||||||||||||||||||||||
| Запрос на обслуживание | ||||||||||||||||||||||||||||||||||
| Ошибка в сообщении | ||||||||||||||||||||||||||||||||||
Рис. 8. Форматы слов для организации передачи сообщений:
К – признак прием/передача; Р – контроль по четности; а – разряды слова; б – командное слово (К); в – информационное слово (И); г – ответное слово
По линии могут передаваться слова любой разрядности. Если для представления информации требуется более 16 разрядов, то она передается последовательно двумя тремя словами и более. Неиспользуемые младшие разряды слова передаются в виде логических 0. Назначение разрядов (за исключением 20-го разряда контроля на четность) для слов каждого типа различно. В командном слове (рис. 8) выделяются следующие поля: поле «адрес ОУ» (пять разрядов), поле признака «прием (логический 0)/передача» (логическая 1) —один разряд, поле «подадрес/режим управления» (пять разрядов), поле «число информационных слов/код команды управления» (пять разрядов), поле «контроля четности р» (одни разряд). Информационное слово состоит из поля «информация» (16 разрядов) и поле «контроль четности» (один разряд). Ответное слово содержит поле «адрес ОУ», (пять разрядов), поле «признаки состояния» (шесть разрядов), поле «неисправность ОУ» (один разряд) и поле «контроль четности» (один разряд). В командном слове может быть указан один из 32 адресов ОУ. Кодирование поля «подадрес/режим управления» (разряды 10 — 14) и коды команд (разряды 15 — 19) приведены ниже:
| Код, Разряды 10 — 14 | Подадрес или режим управления |
| Признак записи команды в разрядах 15 — 19 командного слова. При остальных значениях разрядов 10 — 14 командного слова в его поле числа информационных слов записывается число слов в передаваемом массиве от одного (00001) до 32 (00000) | |
| Подадрес. Определяет начальный адрес вводимых или выдавае- | |
| · | мых слов внутри ОУ |
| · | |
| · | |
| Резерв | |
| Код команды, Разряды 15 — 19 | Команда |
| Принять управление каналом | |
| Передать ответное слово | |
| Провести самоконтроль | |
| Блокировать передатчик | |
| Разблокировать передатчик | |
| Сбросить признак отказа ОУ | |
| Установить признак отказа ОУ | |
| Установить ОУ в исходное состояние | |
| Войти в режим синхронизации | |
| 01001 — 01111 | — |
| Выдать слово состояния ОУ | |
| Синхронизация | |
| Передать последнее К | |
| Отключить резервный канал | |
| Отключить резервный канал | |
| Подключить резервный канал | |
| 10101 — 11111 | — |
Примечание. Прочерк означает что коды находятся в резерве
При этом следует учитывать, что в стандарте MIL-STD-1553 В из 32 возможных команд управления используется только 15, остальные зарезервированы для последующих применений.
Обобщенная логическая структура оконечного устройства. Рассмотренные принципы организации МЛПИ, виды и форматы сообщений, команды и режимы работы определяют сложную (как с логической, так и со схемотехнической точек зрения) структуру ОУ (рис. 4.9). В общем случае в его состав входят: согласователи ТТЛ-уровней с уровнями сигналов МЛПИ и обратно; шифратор, преобразующий последовательный двоичный код в фазоманипулированный код МАНЧЕСТЕР-2; дешифратор, выполняющий функции, обратные шифратору; регистры-преобразователи параллельного двоичного кода в последовательный и обратно; генератор синхросигналов. Выходные передающие каскады обеспечивают амплитуду сигнала до 15 В при токе нагрузки до 150 мА, причем фронты сигналов составляют не более 100 — 150 нс. В дешифраторе манчестерского кода используется тактовая частота 12 МГц, а в шифраторе — 2 МГц.
| Входной каскад преобразования | Выходной каскад преобразования | ||||||||||||||||||||||||||||||||||||
| X1 | X1 | Y1 | Y1 | Генератор синхросигналов | |||||||||||||||||||||||||||||||||
| Дешифратор | Шифратор | ||||||||||||||||||||||||||||||||||||
| 2МГц | |||||||||||||||||||||||||||||||||||||
| 12МГц | |||||||||||||||||||||||||||||||||||||
| 1МГц | |||||||||||||||||||||||||||||||||||||
| dj | cj | d0 | c0 | ||||||||||||||||||||||||||||||||||
| Последовательно-параллельный преобразователь | Параллельно-последовательный преобразователь | ||||||||||||||||||||||||||||||||||||
| СП | РПр | Р | К/D | D(15-90) | D(15-00) | C0 | K/D | РП | |||||||||||||||||||||||||||||
Рис. 9. Логическая структура ОУ:

 РП – разрешение передачи; РПр – разрешение приема; СП – строб приема; Сi – строб выдачи бита; di – биты входных данных; С0 – строб выдачи слова; d0 – биты выходных данных; К/D –тип слова (команда данных): С0* – строб выдачи бита; D – данные; р – бит четности; X1, Х1, Y1, Y1 – биполярные входы и выходы
РП – разрешение передачи; РПр – разрешение приема; СП – строб приема; Сi – строб выдачи бита; di – биты входных данных; С0 – строб выдачи слова; d0 – биты выходных данных; К/D –тип слова (команда данных): С0* – строб выдачи бита; D – данные; р – бит четности; X1, Х1, Y1, Y1 – биполярные входы и выходы
При передаче данных в МЛПИ униполярный код в шифраторе преобразуется в бифазный с помощью двух независимых каскадов усиления и двух включенных встречно обмоток импульсного трансформатора, выходная обмотка которого генерирует биполярный фазоманипулированный сигнал. При приеме дифференциальные усилители согласователя раскладывают биполярный фазоманипулированный сигнал на две составляющие, поступающие па вход дешифратора.
Как правило, приемные каскады включают в себя также фильтры низких частот с несколькими уровнями подавления и схемы нормализации амплитуды выходного сигнала.
Примеры применения принципов мультиплексирования в бортовом оборудовании летательных аппаратов [23]. Примером одноуровневой организации мультиплексного канала информационного обмена, реализованного по стандарту МIL-STD-1553В, является комплекс бортового оборудования ракеты «КОРМОРАН» класса «воздух — поверхность» ВМС ФРГ (рис. 10). Мультиплексный канал объединяет датчики подсистем бортовой аппаратуры, обеспечивает связь с носителем и цифровыми вычислительными устройствами. Управление обменом информацией по мультиплексному каналу осуществляет специальный контроллер. Система позволяет подключать для решения отдельных подзадач серийно выпускаемые микропроцессорные вычислительные устройства.
 3 3 | |||||||||||||||||||||||||||||||||||
 |  | ||||||||||||||||||||||||||||||||||
 |  |  |  | |  |  | |||||||||||||||||||||||||||||
 | |  | | ||||||||||||||||||||||||||||||||
 | |||||||||||||||||||||||||||||||||||
Рис. 10. Структура комплекса бортового оборудования с МКИО ракеты КОРМОРАН класса «воздух — поверхность»:
1 – отсек электронной головки самонаведения (ГСН); 2 – отсек электронного оборудования; 3 – линия связи с носителем; 4 – электромеханический отсек; 5 – элементы сервосистемы; 6 – блок радиолокационного оборудования; 7 – блок обработки сигналов ГСН; 8 – контроллер МЛПИ; 9 – БЦВМ навигационной подсистемы; 10 – запоминающее устройство; 11 – оконечное устройство; 12 – контроллер общей шины; 13 – блок обработки сигналов датчиков инерциальной системы; 14 – датчик инерциальной системы; 15 – радиовысотомер; 16 – телеметрическая аппаратура; 17 – интерфейс; 18 – предохранительное устройство и механизм возведения взрывателя; 19 – блок питания; 20 – приводные устройства; 21 – МЛПИ
Двухуровневая организация комплекса бортового оборудования на основе мультиплексного канала с использованием стандарта МIL-STD-1553В реализована в палубном вертолете SН-60В «Си Хок» фирмы Сикорский (США). При этом наряду с обработкой и обменом информацией непосредственно на борту вертолета обеспечивается связь с корабельными подсистемами. Мультиплексный капал верхнего уровня должен обеспечивать обмен информацией между цифровыми вычислителями и внешним запоминающим устройством на магнитной ленте, а канал нижнего уровня — обмен информацией между ЭВМ и бортовыми подсистемами. На этом уровне обрабатывается информация, поступающая от подсистем навигации, индикации и связи (рис. 11).

