 2015-03-20
2015-03-20 1264
1264Схема замкнутой системы с положительной обратной связью по току приведена на рис. 3.21, а. В качестве датчика тока в этой системе может быть использован шунт с сопротивлением RШ. Падение напряжения на RШпропорционально току якоря I. В результате сигнал обратной связи по току определяется как: UОС = βI, где β — коэффициент обратной связи по току, имеющий размерность ом.
Отметим, что в качестве резистора RШчасто используется обмотка дополнительных полюсов и компенсационная обмотка.
Сигнал на входе усилителя в данной системе определяется суммой задающего и сигнала обратной связи, т.е. UВХ = UЗС + βI.
Выражения для электромеханической и механической характеристик ДПТ в замкнутой системе:   где kС =kУ kП β — общий коэффициент усиления системы. Анализ жесткости получаемых характеристик проведем, сопоставляя суммарное сопротивление цепи якоря RЯ + RП с общим коэффициентом усиления kС, также имеющим размерность ом. Нетрудно заключить, что где kС =kУ kП β — общий коэффициент усиления системы. Анализ жесткости получаемых характеристик проведем, сопоставляя суммарное сопротивление цепи якоря RЯ + RП с общим коэффициентом усиления kС, также имеющим размерность ом. Нетрудно заключить, что | 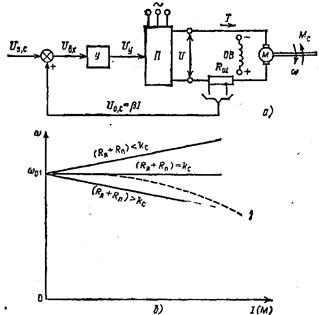 |
при RЯ + RП > kС характеристики ДПТ имеют отрицательную жесткость,
при RЯ + RП = kС — бесконечно большую жесткость, а
при RЯ + RП < kС жесткость характеристик положительна. Характеристики, соответствующие этим трем соотношениям, показаны на рис. 3.21,6.
Таким образом, при использовании положительной обратной связи по току могут быть получены характеристики любой жесткости, в том числе и положительной. Однако из-за непостоянства коэффициента усиления системы kc в результате наличия положительной обратной связи реальные характеристики имеют нелинейный характер (кривая 1), поэтому такая связь обычно используется в совокупности с другими, например с обратной связью по напряжению.

