 2015-04-08
2015-04-08 3353
3353ВВЕДЕНИЕ
Выполнение курсового проекта по ТММ связано с решением ряда задач по определению рациональных параметров механизмов на основе их кинематического и динамического анализов. Студент, самостоятельно выполняющий задание, часто сталкивается с трудностями выбора методов решения и вынужден обращаться к соответствующей литературе. К сожалению, в последнее время такой литературы становится все меньше, а справочные материалы, содержащие весь комплекс вопросов, связанных с проектированием механизмов и машин, довольно дороги. Настоящее учебное пособие предназначено для студентов УГТТА, обучающихся по направлению «Технологические машины и оборудование», учебный план которого предусматривает выполнение курсового проекта по ТММ. Все излагаемые материалы служат основой выполнения заданий по расчету и проектированию механизмов горных машин и могут быть использованы для самостоятельной работы.
В учебном пособии изложены две основные задачи которые решает ТММ: анализ механизмов и синтез механизмов. Анализ механизмов состоит в исследовании кинематических и динамических свойств механизма по заданной его схеме. Синтез механизма заключается в проектировании механизма по заданным его свойствам.
В основе курса ТММ лежат фундаментальные положения механики, математики, и он является связующей дисциплиной между общенаучными и специальными. Изучение ТММ на современном этапе невозможно представить без использования ПЭВМ, так как анализ и синтез механизма связаны с относительно большим объемом вычислений.
1. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
Кинематические пары и структура плоских механизмов
Машина есть устройство, выполняющее механические движения для преобразования энергии, материалов и информации с целью удовлетворения физических и духовных потребностей человека.
Механизм есть система тел, предназначенная для преобразования движения одного или нескольких твердых тел в требуемые движения других твердых тел. Основным признаком механизма является преобразование механического движения. Как правило, механизм входит в состав машины. Твердое тело входящее в состав механизма называется звеном. В каждом механизме имеется неподвижное звено, называемое стойкой, а также входное звено, которому сообщается движение, и выходное звено, совершающее заданное движение. Остальные подвижные звенья называются соединительными, или промежуточными. Звенья соединяются между собой подвижно. Подвижное соединение двух соприкасающихся звеньев называется кинематической парой. Любое из таких соединений накладывает некоторые ограничения на перемещения звеньев относительно друг друга, называемые связями. Кинематические пары классифицируются по числу связей, налагаемых этими парами и называемых их классом. Как известно из курса теоретической механики, число степеней свободы твердого, свободно движущегося в пространстве тела равно шести, поэтому класс кинематической пары не может быть более шести. Наиболее распространенными являются кинематические пары пятого класса: поступательная, вращательная и винтовая. Система звеньев, связанных кинематическими парами, называется кинематической цепью.
В курсовом проекте рассматриваются плоские кинематические цепи, в которых все звенья совершают плоское движение, параллельное одной неподвижной плоскости. Кинематические цепи делятся на простые и сложные. В простой цепи каждое звено входит не более чем в две кинематические пары. Различают замкнутые и незамкнутые кинематические цепи. В замкнутой, цепи каждое звено входит по крайней мере в две кинематические пары.
Наибольшее распространение имеют шарнирные механизмы, звенья которых соединены только вращательными парами.
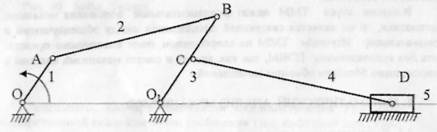
Рис. 1.1. Схема пятизвенного плоского механизма
На рис. 1.1 показан механизм, содержащий звенья, совершающие вращательное, поступательное и плоскопараллельное движения. В этом механизме пять подвижных и одно неподвижное звено. Звено I, вращающееся вокруг оси, обозначенной точкой О, называется кривошипом. Звенья 2 и 4, образующие вращательные кинематииеские пары только с подвижными звеньями, называются шатунами. Звено 3 называется коромыслом, при своем движении оно качается относительно оси См, совершая в каждый момент времени вращательное движение. Звено 5 совершает поступательное движение и называется ползуном.
Основной принцип образования механизмов был впервые сформулирован в начале XX века русским ученым Л.В. Ассуром. Он заключается в том, что к начальному звену и стойке присоединяется кинематическая цепь с нулевой степенью свободы относительно тех звеньев, с которыми она имеет кинематические пары. Такая цепь не распадается на более простые цепи с нулевой степенью подвижности и называется группой Ассура.
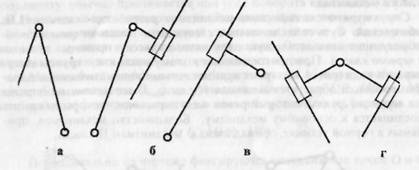
Рис. 1.2. Группы Ассура:
а - первого; б - второго; в - третьего; г - четвертого вида
Для пространственного механизма, имеющего п подвижных звеньев, общее число координат, которые определяют положения его звеньев, равно 6п. Каждая из кинематических пар пятого класса отнимает у подвижного соединения 5 степеней свободы, каждая пара четвертого класса - 4 степени, третьего -3, второго - 2 и первого - одну степень свободы. Поэтому число степеней свободы пространственного механизма, равное количеству его независимых возможных перемещений, может быть определено по формуле
 (1.1)
(1.1)
где р5 - количество кинематических пар пятого класса, р4 - число кинематических пар четвертого класса и т.д.
Уравнение (1.1) называется структурной формулой кинематической цепи общего вида, известной в литературе как формула Сомова - Малышева.
Если кинематическая цепь образована парами 5 и 4 класса, а звенья совершают движение параллельно одной и той же плоскости (а плоскость в каждом движении отнимает по три степени свободы), то число степеней свободы механизма определяется из уравнения Чебышева:
 (1.2)
(1.2)
Для плоского механизма, изображенного на рис. 1.1, число степеней свободы:

Таким образом, достаточно знать одну координату, в частности, угол поворота кривошипа, чтобы однозначно определить положения всех звеньев этого механизма.
Структурную классификацию механизмов разработал академик И.И. Артоболевский. Суть ее заключается в следующем: начальное звено и стойка, образующие кинематическую пару пятого класса, приняты за механизм первого класса. При присоединении к этому механизму группы Ассу-ра первого вида (рис. 1.2) с тремя вращательными кинематическими парами пятого класса образуется механизм II класса. Класс механизма определяется порядком группы, который равен числу элементов, которыми группа присоединяется к основному механизму. Большинство механизмов, применяемых в горной технике, принадлежит к механизмам II класса.
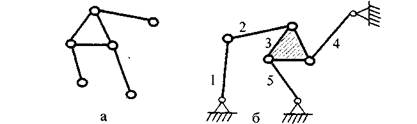
Рис. 1.3. Трехповодковая группа Ассура:
а - группа III класса III порядка; б - механизм III класса
На рис. 1.3,а приведена четырехзвенная трехповодковая группа III класса третьего порядка и, соответственно, механизм III класса. Нетрудно увидеть, что число степеней свободы этого механизма при присоединении к начальному звену 1 звеньев 2, 3, 4 и 5 также равно единице. При определении класса механизма необходимо указывать звено, принятое за начальное, так как от выбора начального звена может измениться класс механизма. В частности, если в механизме, изображенном на рис. 1.3,б за начальное звено принять звено 5 или 4, то это будет механизм II класса.

