 2015-04-08
2015-04-08 1501
15013.3.1. Содержание кинематического расчета. Кинематический расчет передаточного механизма привода, связанный с типом и характером задания, частично изложен выше в объеме, необходимом для определения частоты вращения приводного двигателя. Для расчета и конструирования механизма необходимо выполнить кинематический расчет, включающий: определение частоты вращения рабочего органа nР, мин-1 и каждого вала механизма ni мин-1, определение общего передаточного числа механизма uM и разбивку его по ступеням передач, входящим в данный механизм.
3.3.2. Определение частоты вращения рабочего органа nР, мин-1. Частота вращения рабочего органа машины (барабана, звездочки) во всех заданиях, кроме винтовых конвейеров (задания 19-23) и рулевых машин (задания 36-37), определяется по формуле, мин-1
nР =  , (3.5)
, (3.5)
где v - линейная скорость рабочего органа (ленты, цепи, каната), м/с;
D - диаметр барабана тяговой звездочки, м.
Диаметр тяговой звездочки конвейера равен, мм
D =  , (3.6)
, (3.6)
Где t - шаг тяговой цепи, мм;
Z - число зубьев звездочки (см. задания).
В заданиях 27, 28, 34, 35 средний диаметр швартовного барабана (турачки) определяют через диаметр швартовного каната dK по зависимости DШВ.Б = 20 dK.
В заданиях 19-23 и 36-37 частота вращения соответственно винта nВ и баллера nб известны (см. исходные величины заданий).
3.3.3. Определение общего передаточного числа и разбивка его по ступеням передачи. Общее передаточное число механизма uM определяется по формуле
uM =  = u1 u2 u3, (3.7)
= u1 u2 u3, (3.7)
где nДВ - частота вращения ротора двигателя, мин-1;
nР - частота вращения рабоего органа, определяется по формуле (3.5)
или принимается из заданий 19-23, 36, 37, мин-1;
u1 u2 u3 - передаточные числа ступеней механизма (см. табл. 3.2).
При разбивке общего передаточного числа механизма uМ по ступеням передачи учитывается требования стандартов, обеспечения нормальной смазки колес, окунанием в масляную ванну и минимальный габаритов передачи.
Учитывая эти требования, передаточное число быстроходной ступени (uб) двухступенчатого цилиндрического редуктора (uР) рекомендуется определить по формуле [14].
uб = u1 = 1,25 √ uР. (3.8)
Для двухступенчатого коническо – цилиндрического редуктора число быстроходной ступени (конической передачи) принимают равным
uб = u1 ≤ √ uР. (3.9)
Значения передаточных чисел ступеней передачи и редукторов приведены в табл. 3.2, которые необходимы для определения общего передаточного числа механизма uМ.
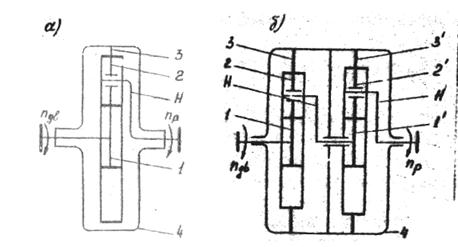 |
3.3.4. Передаточное число и числа зубьев планетарных зубчатых редукторов. Согласно заданиям 11, 12, 13 и 14 кинематические схемы одно – и двухступенчатых планетарных редукторов показаны соответственно на рис. 3.2, а и рис. 3.2, б.
Рис. 3.2. Кинематические схемы планетарных редукторов:
nДВ = n1 - частота вращения двигателя или ведущего вала редуктора; nР – частота вращения ведомого (выходного) вала редуктора или водила Н в схеме «а» и в схеме «б» водила второй ступени; 1, 1´ - солнечное зубчатое колесо соответственно первой и второй ступени; 2, 2´ - зубчатые колеса сателлиты первой и второй ступени; 3, 3´ - зубчатые колеса неподвижные первой и второй ступени; 4 - корпус редуктора
Передаточное число простого одноступенчатого планетарного редуктора (рис. 3.2, а) определяется по формуле [8]
 , (3.10)
, (3.10)
где z1¸ z3 - числа зубьев солнечного и неподвижного колеса одноступенчатого редуктора или числа зубьев солнечного и неподвижного колеса первой ступени двухступенчатого редуктора.
Передаточное число двухступенчатого редуктора равно
 (3.11)
(3.11)
Передаточное число первой ступени ( )1 рекомендуется принимать больше, чем второй ступени ()2 с целью получения одинаковых габаритов неподвижных колес 3 и 3´. Максимальное значение передаточного числа первой ступени ()1 принимают равным до 12,5 - 15 (см. табл. 3.2).
)1 рекомендуется принимать больше, чем второй ступени ()2 с целью получения одинаковых габаритов неподвижных колес 3 и 3´. Максимальное значение передаточного числа первой ступени ()1 принимают равным до 12,5 - 15 (см. табл. 3.2).
При проектировании планетарных передач, когда габариты колеса 3 не заданы, число зубьев z1¸ z2¸ z3 определяют при соблюдении трех условий собираемости;
а) условие соосности валов центральных колес удовлетворяется следующим равенством чисел зубьев колес (без смещения производящего контура):
z3 = z1 + 2 z2; (3.12)
б) для обеспечения нормального вхождения зубьев в зацепление при равных углах расположения сателлитов должно быть обеспечено условие сборки
 , (3.13)
, (3.13)
где nC - число сателлитов (обычно три);
γ - целое число;
в) условие соседства - чтобы соседние сателлиты не задевали при вращении зубьями друг друга
(z1 + z2) sin  >z2 + 2. (3.14)
>z2 + 2. (3.14)
Окончательно принятые числа зубьев z1¸ z2¸ z3 должны удовлетворять указанным трем условиям. Практически эти условия обеспечиваются следующим образом.
Принимают число сателлитов nC = 3, расположенных по окружности с шаговым углом 120º, и число зубьев солнечного колеса в пределах z1 = 15-21.
Затем из формулы (3.10) определяют число зубьев неподвижного колеса
z3 = ( - 1) z1 - целое число зубьев.
Из условия соосности (формула 3.12) определяет число зубьев колеса сателлита.
z2 =  - целое число зубьев.
- целое число зубьев.
Далее проверяют условия сборки и соседства по формулам (3.13), (3.14).
По принятым окончательно числам зубьев проверяют передаточное число .которое должно быть близким к принятому значению.
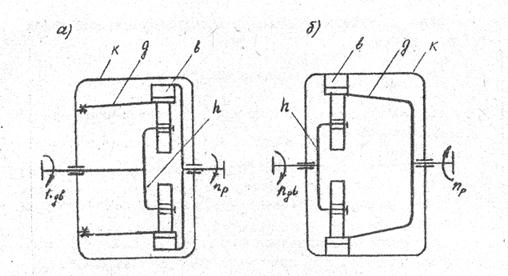
3.3.5. Передаточное число и числа зубьев волнового редуктора. Согласно заданиям 15, 16 и 17. 18 кинематические схемы волновых зубчатых редукторов представлены соответственно на рис. 3.3, а и рис. 3.3, б.
Передаточное число волнового редукторов (рис. 3.3, а) при закрепленном гибком колесе g от генератора h к жесткому колесу b определяется по формуле [9].
 , (3.15)
, (3.15)
где nДВ, nР - известны из предыдущего;
zb¸zg - числа зубьев жесткого и гибкого колес. В волновых передачах обычно принимают zb - zg = UKz;
где U - число волн генератора, в двух волновых U = 2;
Kz - коэффициент разности чисел зубьев обычно Kz = 1.
 |
Тогда zb - zg = 2.
Рис. 3.3. Кинематические схемы волновых зубчатых редукторов:
nДВ = nh - частота вращения двигателя или генератора волн h; nР - частота вращения ведомого вала редуктора (жесткого колеса - рис. 3.3, а, гибкого колеса - рис. 3.3, б) или рабочего органа; h - генератор двухволновой роликовый (может быть дисковый, кулачковый); b - жесткое зубчатое колесо; К - корпус редуктора
Имея значение передаточного числа  , нетрудно назначить числа зубьев zb и zg.
, нетрудно назначить числа зубьев zb и zg.
Например, при = 100, zb = 200, zg = 198.
Передаточное число волнового редуктора (рис. 3.3, б) при закрепленном жестком колесе b от генератора h к гибкому колесу g равно [9]
= -  . (3.16)
. (3.16)
Знак минус указывает, что вращение гибкого колеса g будет в обратную сторону вращению генератора волн h.

