 2015-04-17
2015-04-17 2837
2837Вернемся к вопросам создания первых автоматических регуляторов И.И. Ползунова и Д. Уатта. Центробежный регулятор вошел в технику настолько широко, что уже в первой четверти XIX века было известно множество примеров его использования в паровых машинах. Однако, как показала практика, работа регулятора не всегда отвечала требованиям. Простое перенесение одного и того же по параметрам регулятора на различные по параметрам паровые машины привело к различным результатам, вплоть до неудовлетворительной их работы. Если знать, что регулятор - это устройство, выполняющее логические операции и заменяющее оператора в его умственном труде по управлению процессами, то такое простое копирование и не могло иметь другого результата. Аналогичный случай имеет место, например, тогда, когда водитель грузового автомобиля пересаживается на легковой автомобиль. Если его решения и действия остаются прежними, то понятно, что аварийная ситуация неизбежна, так как менее инерционная легковая машина гораздо больше будет реагировать на изменение подачи бензина и на положение руля, чем грузовой автомобиль. Итак, возникло препятствие в использовании центробежного регулятора, связанное со сложностью выбора его параметров. То, что известно сейчас, было далеко не очевидным: регулятор следовало всякий раз подбирать по параметрам с учетом параметров паровой машины. В этом смысле регулятор и машина представляли собой единое целое - систему.
Возникновение теории автоматического регулирования связано с именем профессора Петербургского практического института Ивана Алексеевича Вышнеградского, который рассмотрел совместно динамику системы регулятор-машина и изучил влияние регулятора на процессы в системе (1876 г.). Здесь же следует указать и на работы Дж. К. Максвелла, который также рассмотрел регулятор и машину как единое целое (1868 г.)
Практическим результатом работ И.А. Вышнеградского и
Дж. К. Максвелла стала возможность рассчитать регулятор в каждом конкретном случае. Дальнейшее развитие теории автоматического регулирования связывается с именами Стодолы, Николая Егоровича Жуковского, Александра Михайловича Ляпунова и других русских и зарубежных ученых. К середине XX века автоматика проникает практически во все области техники. В этой связи в рамках теории автоматического регулирования происходит накопление и систематизация опыта исследования и проектирования различных по физической природе и назначению систем. Вместе с тем совершенствование математических методов позволяет, по выражению Анри Пуанкаре, “ экономить мысль и время ”, делая процесс их проектирования более эффективным и целенаправленным.
Чтобы понять дальнейшие рассуждения, зададимся вопросом, в чем заключается развитие человеческого общества и созданной им техники? Один из ответов на этот вопрос следующий: развитие - это возрастание степени организованности окружающего мира. Развитие человеческого общества от рода до государства - это развитие различного рода институтов: государства, системы власти и управления, системы законов и т.д., а в сфере развития техники - это эволюция орудий труда от орудий каменного века до ЭВМ. Если поначалу развитие техники было связано с получением, передачей, преобразованием и использованием различных видов энергии, а функции управления машинами оставались за человеком, то с появлением мощных источников энергии, роль мускульной силы человека в управлении оборудованием понижалась. Однако, значение функций, выполняемых человеческим мозгом, повышалось. Автоматизация явилась тем шагом в развитии техники, когда стала происходить замена человека в его функциях контроля и управления. Автоматические управляющие устройства стали новыми средствами организации уже организованной материи: станков, технологического оборудования.
В свою очередь, различные технические средства организовывались в фабрики, заводы, отрасли промышленности. Вопросы организации сложных технических комплексов свелись к вопросам управления трудовыми и материальными ресурсами, т.е. коллективами людей и парками станков и машин. Задача повышения эффективности такого управления – объективная задача, стоящая перед обществом на определенном этапе его развития. Для ее решения нужно было понять законы управления. Если прежде при создании технических устройств следовало открыть законы неживой природы: законы сохранения материи, энергии и др., то в данном случае пришлось обратиться к познанию живой материи. Причина такого подхода в том, что именно живые системы поддерживают (регулируют) свое состояние за счет механизмов упорядочивания (управления) потребляемой энергии. Вместе с тем сам человек - такая живая система, которая способна решать задачи управления.
| Сопротивление сосудов |
Одним из таких примеров является система терморегуляции организма человека.
| Центральная нервная система |
| Сопротивление сосудов |
| Частота сердечных сокращений |
| Ударный объем |
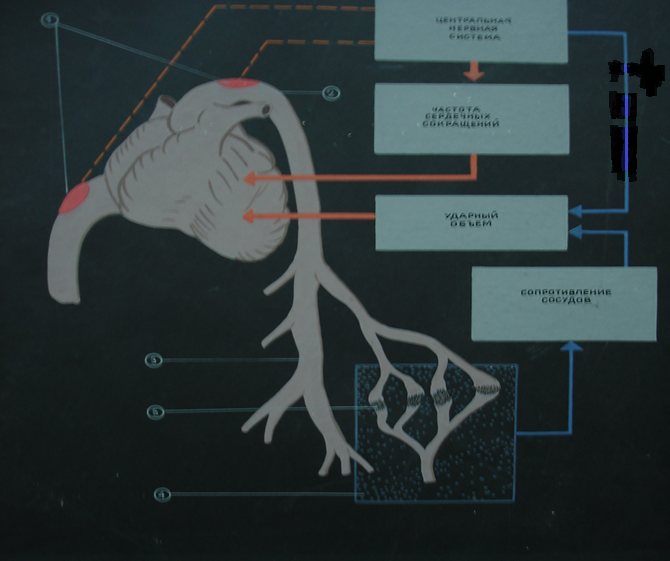
Рис.3.1. Система управления кровообращением:
1- барорецепторы – сложное образование, состоящее из нервных окончаний «чувствительных, нейронов», которые обеспечивают измерение величины артериального давления.
В ней поддержание температуры тела 36,50С осуществляется за счет управления процессом “ сжигания энергии ”, заключенной в потребляемой человеком пище, несмотря на изменение температуры окружения, осуществление человеком движений.
Частота пульса, содержание кислорода, сахара в крови – также регулируемые параметры человеческого организма (рис. 3.1).
Другой пример саморегуляции - система зрения, которая может быть описана следующим образом.
Величина зрачка (рис.3.2) меняется в зависимости от освещения сетчатки глаза так, чтобы эта освещенность оставалась постоянной, несмотря на изменение силы света при взгляде на различные по освещенности предметы. Этим достигается хорошее видение как в сумерках, так и при ярком солнце, т.е. приспособление глаза к изменяющимся условиям.
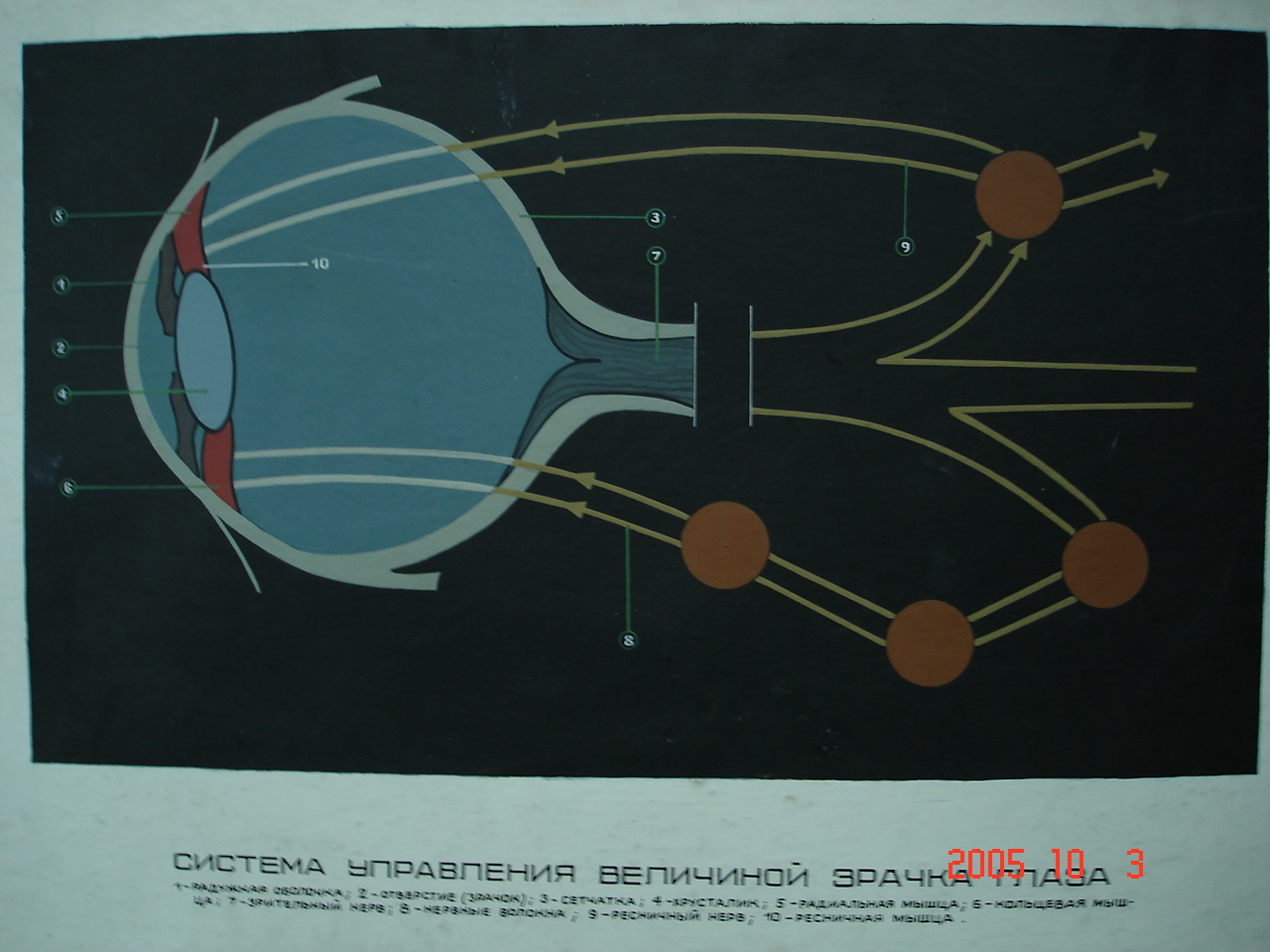
Рис.3.2 Система управления величиной зрачка глаза:
1- радиальная мышца, 2- радужная оболочка, 3 – отверстие (зрачок), 4 – хрусталик, 5 – кольцевая мышца, 6- сетчатка, 7 – зрительный нерв, 8 – ресничный нерв, 9 – нервные волокна
Рассматривая выпуск заводом продукции (рис.3.3) в соответствии с плановым заданием, вновь сталкиваемся с задачей регулирования. Здесь она сводится к поддержанию определенной производительности предприятия, несмотря на колебания в количестве рабочей силы, сырья и т.п. Если учесть также технические системы автоматического регулирования, нашедшие применение на производстве, то можно сказать, что аналогия, отмеченная в приводимых примерах, становилась более очевидной. Несмотря на различие физической природы систем, потребляемой ими энергии, достигаемых целей, просматривалась общность, скрытая в самом механизме управления.
Необходимо было понять, в чем заключается этот механизм, чтобы открыть закон построения систем управления.
Такой закон был открыт Н. Винером. В своей книге “ Кибернетика, или управление и связь в животном и машине ”, вышедшей в 1948 г., Винер назвал этот закон принципом обратной связи. Суть его на первый взгляд проста. Однако следует помнить, что каждый школьник знает закон Ньютона, но далеко не каждый может его вывести.
| Поток рабочей силы |
| выпуск |
| Поток капиталовложений |
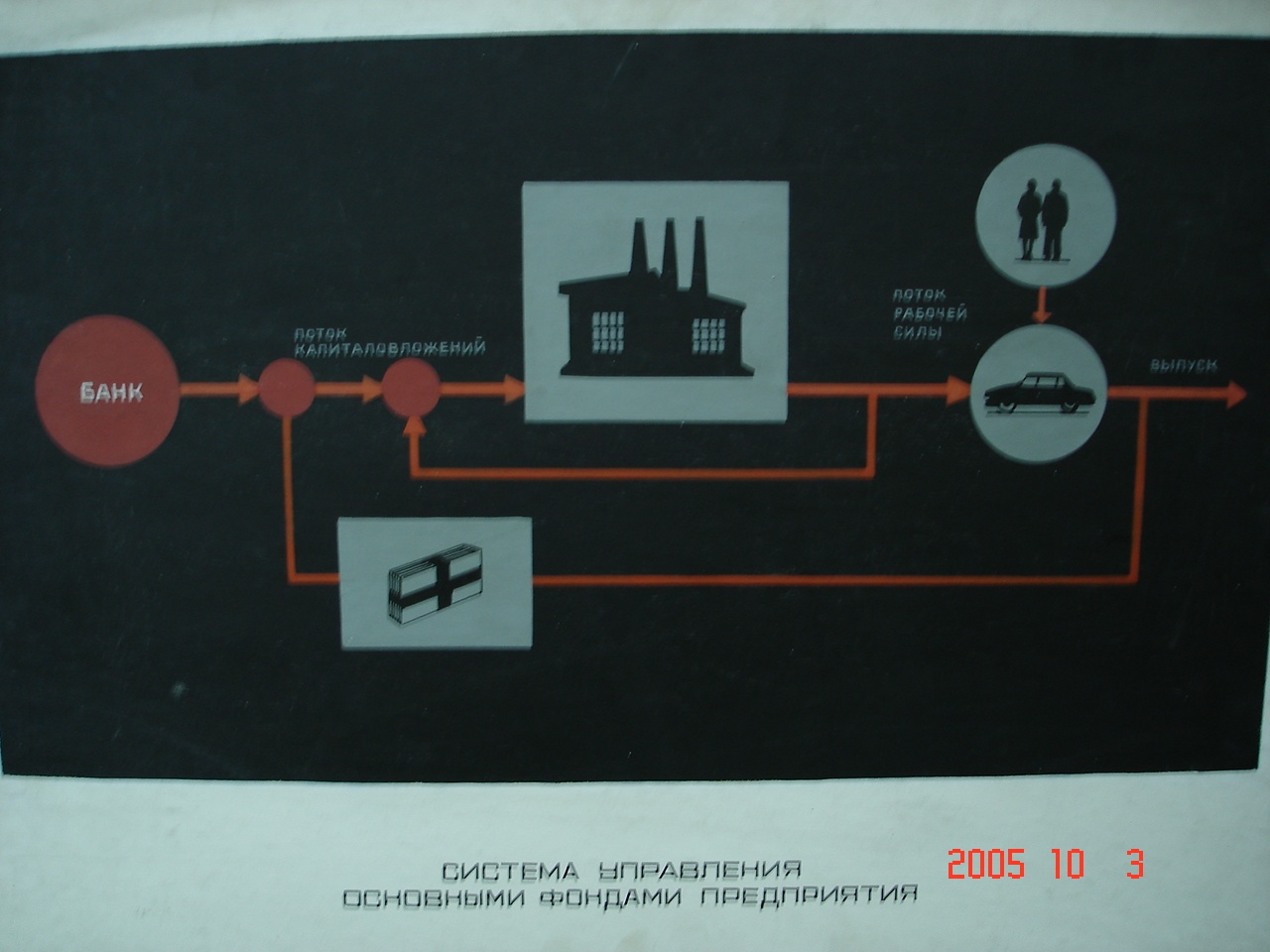
Рис.3.3. Система управления основными фондами предприятия
Рассмотрим пример управления водителем положением автомобиля на дороге (рис. 3.4). Какие задачи, с помощью чего и как решаются в данном случае? Перечислим последовательность операций процесса управления.
| Д |
| Ж |
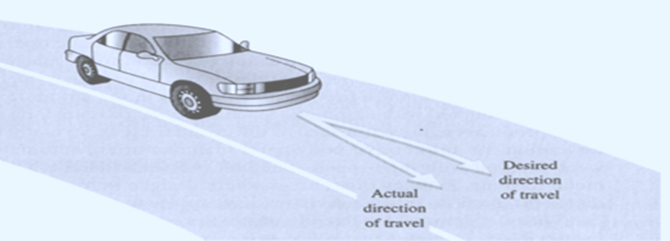
Рис.3.4 Управление положением автомобиля:
Ж – желаемое положение автомобиля на дороге, Д – действительное положение автомобиля
Она заключается в следующем:
1 - сведения о положении автомобиля на дороге, полученные с помощью глаз, поступают в мозг;
2 - в мозгу происходит оценка ситуации, заключающаяся в сравнении действительного положения с желаемым для оценки их расхождения;
3 - здесь же, в мозгу принимается решение о необходимых действиях по изменению положения руля (в какую сторону и насколько нужно повернуть руль);
4 - с помощью мускулов (исполнителей приказов мозга) производится поворот руля (регулирующего органа) на предполагаемый угол;
5 - автомобиль меняет свое положение в желаемую сторону;
6 - меняется ситуация на дороге, что заставляет вновь и вновь следовать пунктам 1,2 и т.д.
Таким образом, реализуется непрерывность процесса управления.
Схематично можно представить сказанное так, как показано на рис. 3.5.
Процесс управления представляется как процесс по замкнутому циклу (контуру). Разрыв контура приводит к невозможности решения задачи регулирования. Закройте, например, глаза шоферу… Термин
“ обратная связь ” применяется здесь так, что информация о состоянии автомобиля, т.е. о процессе изменения его положения на дороге, непрерывно (снова и снова, обратно) используется для управления этим положением.
Процесс
Действие Измерение
Сравнение
Принятие решения
Рис. 3.5.Последовательность процесса управления
В американской литературе это обстоятельство особо подчеркивается в названии систем управления: feed back control systems – (системы с обратной связью). По этому принципу построены системы регулирования Ползунова и Уатта, системы регулирования температуры тела и величины зрачка глаз, системы управления производством и т.д., т.е. любые самоорганизующиеся системы.
Реализация принципа обратной связи достигается путем строго определенной организации элементов в систему, как это показано на рис. 3.6.
| Объект управления (автомобиль) |
| Измеритель положения на дороге (глаза) |
| Объект управления (автомобиль) |
| Регулятор (мозг) |
| Исполнительный элемент (мускулы) |
| Регулирующий орган (руль) |
| Положение на дороге |
Рис. 3.6. Структура системы управления автомобилем
Последовательность элементов не может быть иной. Так «сделать, а потом подумать» случается с некоторыми людьми, но для систем это исключено.
Закон обратной связи устанавливает не только то, что управление рабочим процессом осуществляется на основании информации о параметрах этого процесса, но и то, какие элементы и в какой последовательности должны взаимодействовать между собой.
Одно из важных обобщений, сделанных Н.Винером, связано с понятием «информация». Прежде чем его рассмотреть, важно отметить ценность для наук обобщающих понятий. Ими являются, например, понятие силы и энергии. Развиваясь на протяжении веков, они обретали порой различный смысл. Однако в настоящее время, имея конкретные, трактуемые определения, эти обобщающие понятия используются практически во всех сферах человеческой деятельности.
Подобрать слово, отражающее смысл описываемого объекта исследования, значит связать разрозненные вещи одним организующим началом.
Таким понятием явилось понятие «информации».
В обыденной жизни мы понимаем, что с закрытыми глазами автомобилем не управляют (в отличии от управления лошадью, когда порой можно расслабиться). Ранее, при наличии только гужевого транспорта тяжело было дойти до понимания механизма управления, так как лошадь и сама могла довезти ездока до дома. Сегодня задача управления, на основе управления автомобилем понимается лучше.
Для управления объектом (в рассматриваемом случае автомобилем) нужно иметь об состоянии объекта конкретные сведения, быть информированным. Но этого мало.
Нужно правильно распорядится имеющейся информацией, т.е. правильно ее обработать и принять правильные решения по управлению. Иначе произойдет авария.
Взгляд на один и тот же объект исследования может быть разным у различных специалистов. Так, теплоэнергетик, проектируя оборудование для получения энергии, будет рассматривать процессы с точки зрения получения наибольшего коэффициента полезного действия.
Специалист по системам управления за основу рассмотрения процессов управления должен принять «информационный взгляд» на процессы в системах управления.
В чем он заключается?
Прежде всего, в том, что процессы управления – процессы циркуляции информации. Образно говоря, информация – «кровь» систем.
Передача информации в нашем сознании тесно связана с радио-, телевизионными -, телеграфными сигналами.
Отсюда каждый элемент системы рассматривается как передатчик информации от предыдущего элемента к последующему, т.е. каждый элемент принимает входной сигнал и формирует выходной сигнал для следующего элемента системы.
Что можно сделать с информацией в процессе передачи? Исказить, задержать.
Следует понимать, что для этого существуют объективные причины. Во-первых, требуется время для того, чтобы сигнал достиг потребителя (отсюда задержка информации, сигнала). Во-вторых, на полезный сигнал могут накладываться шумы, делая его плохо различимым (дождь, снег делают видимость дороги хуже).
Информация, принятая с опозданием и искаженная, может оказаться уже ненужной и, будучи неправильно понятой, привести к неправильным решениям.
Первый шаг в понимании работы системы – составление ее блок схемы, на которой каждый из элементов изображается блоком с входным и выходным сигналами.
В качестве выходного рассматривается параметр, характеризующий процесс, реализуемый элементом и отражающий его назначение. Так для автомобиля это положение на дороге (в сантиметрах). Входным же принимается сигнал - параметр от предыдущего элемента, являющийся причиной, влияющей на результат работы рассматриваемого элемента. В случае с автомобилем это угол поворота руля (в градусах). Пример графического представления автомобиля в виде блока показан на рис.3.7.
| Положение на дороге |
| Положение руля |
| автомобиль |
 , град m, см
, град m, см Рис.3.7. Пример графического представления объекта управления – автомобиля
В настоящее время кибернетика рассматривается как наука об управлении, передаче и переработке информации в технических и нетехнических системах (живых организмах и др.).
Все сказанное о кибернетике имеет непосредственное отношение к теории автоматического регулирования, которая вместе с теорией информации составляет основу науки, называемой «техническая кибернетика». Важный этап в теории автоматического управления заключается в применении методов кибернетики в задачах исследования и проектирования технических автоматических систем регулирования (АСР). В этом видится большая перспектива, поскольку опыт исследования сложных динамических систем, обобщений в кибернетике, может позволить повысить эффективность решения задач в теории автоматического регулирования.

