 2015-04-17
2015-04-17 3378
3378Поскольку основная задача радиосистем навигационно-пилотажного комплекса сводится, фактически, к формированию текущей измерительной информации о местоположении и скорости движения данного самолета, то исходными составляющими такой информации обычно являются координатные значения дальностей, углов и их производных. Учитывая же, что навигационно-пилотажный комплекс осуществляет дистанционное (с помощью радиоволн) наблюдение за текущей воздушной ситуацией, то единственным материальным носителем координатной информации является радиосигнал, принятый на борту самолета. Отсюда следует, что значения дальностей, углов и их производных извлекаются из принятого радиосигнала (путем измерения его параметров).
Аналитические выражения полевых (электромагнитных) составляющих принятого радиосигнала даются соотношениями (3.1):


На практике, однако, координатная информация извлекается из радиосигналов, представленных не в полевой, а в электрической форме, т.е. описываемых алгоритмами (3.2):


Поскольку каждый радиосигнал вида (3.2) обладает не одним мгновенным значением параметра, а совокупностью мгновенных значении ряда параметров (фаза, частота и т. д.), причем каждый из данных параметров способен нести координатную информацию, отличающуюся от информации, переносимой другим параметром того же радиосигнала, то легко сделать вывод, что даже одиночный радиосигнал является достаточно информационно емким объектом, анализируя который, можно получить пусть неполную, но все же сравнительно многомерную координатную оценку местоположения объекта, а в ряде случаев – и складывающейся воздушной ситуации. Следует отметить, что современные навигационно-пилотажные комплексы обычно оперируют не с одиночными радиосигналами, а с радиосигнальными последовательностями – это позволяет уменьшить ошибки измерений координат, повышать достоверность извлекаемой информации, увеличивать помехоустойчивость комплекса и т.п.
Как известно, положение любого объекта в пространстве (условно представляемого в виде точки – совпадающей, скажем, с центром масс этого объекта) может быть задано совокупностью трех взаимно независимых координат. Если объект находится в пределах прямой видимости (что составляет расстояние до объекта в пределах нескольких сотен километров), то наиболее часто для оценки его местоположения используются следующие координаты:
- дальность (расстояние до объекта)  ;
;
- азимут (угол в горизонтальной плоскости)  – для наземной радиосистемы или курсовой (в горизонтальной плоскости) угол – для бортовой радиосистемы;
– для наземной радиосистемы или курсовой (в горизонтальной плоскости) угол – для бортовой радиосистемы;
- угол места  (в вертикальной плоскости).
(в вертикальной плоскости).
Система указанных координат носит название местной сферической системы (рис. 3.2).
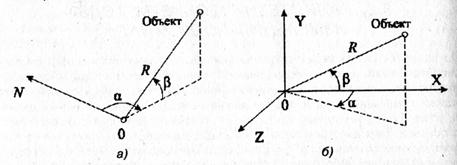 |
Рис. 3.2. Координаты объекта ( ) в местной сферической системе координат: a – случай наземной измерительной радиосистемы; б – случай бортовой измерительной радиосистемы (ось Х совпадает с продольной осью самолета); 0 – местоположение измерительной радиосистемы; – дальность объекта; – азимут (курсовой угол) объекта; – угол места объекта. ) в местной сферической системе координат: a – случай наземной измерительной радиосистемы; б – случай бортовой измерительной радиосистемы (ось Х совпадает с продольной осью самолета); 0 – местоположение измерительной радиосистемы; – дальность объекта; – азимут (курсовой угол) объекта; – угол места объекта. |
Отметим, что в практике авиационных радиосистем нередко используется понятие пеленга (отсюда, в частности, происходит другое название углометрии – пеленгация). Пеленгом в называется угол, характеризующий местоположение объекта и отсчитываемый от некоторой опорной прямой (например, от направления максимума диаграммы направленности, от продольной оси самолета и т.д.). В частных случаях под пеленгом могут пониматься азимут, или курсовой угол, объекта.
Если расстояние до объекта оказывается больше, чем дальность  прямой видимости (рис. 2.11), то оценка его местоположения производится в иных (географической, геоцентрической) системах координат. Использование таких систем координат характерно, скажем, для решения задач дальней навигации.
прямой видимости (рис. 2.11), то оценка его местоположения производится в иных (географической, геоцентрической) системах координат. Использование таких систем координат характерно, скажем, для решения задач дальней навигации.
Поскольку работа в местной сферической системе координат осуществляется, в основном, радиолокационными системами, излучающими в пространство и принимающими из пространства радиосигналы сверхвысоких частот (от 30 МГц до 300 ГГц), то необходимо остановиться, на рассмотрении антенных устройств, наиболее часто применяемых в радиолокационных системах.
Ранее отмечалось, что для дистанционного переноса радиосигналов (в пределах радиосистемы) вида (1.1.1), длины волн  которых располагаются в метровом, дециметровом и сантиметровом диапазонах, используются фидеры закрытого (неизлучающего) типа – так называемые коаксиальные кабели (рис. 2.26).
которых располагаются в метровом, дециметровом и сантиметровом диапазонах, используются фидеры закрытого (неизлучающего) типа – так называемые коаксиальные кабели (рис. 2.26).
Что касается дистанционного переноса радиосигналов (в пределах радиосистемы) вида (3.3)


то в этом случае применяются металлические полые трубы различного (как правило, прямоугольного) сечения – так называемые волноводы. Они употребляются в сантиметровом и миллиметровом диапазонах длин волн  . Для метрового и дециметрового диапазона волноводные конструкции оказываются (в силу сравнительно больших размеров) достаточно громоздкими.
. Для метрового и дециметрового диапазона волноводные конструкции оказываются (в силу сравнительно больших размеров) достаточно громоздкими.
Прямоугольный волновод (рис. 3.1.2), размеры внутренней полости которого равны  и
и  , обладает критической частотой
, обладает критической частотой  , вычисляемой согласно соотношению
, вычисляемой согласно соотношению
 (3.4)
(3.4)
где  м/с;
м/с;  и
и  – целые положительные числа (1, 2, 3…).
– целые положительные числа (1, 2, 3…).
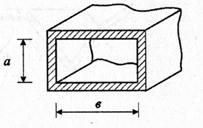 |
| Рис. 3.3. Сечение прямоугольного волновода |
Эта частота является характеристикой конкретного волновода в том смысле, что радиоволны, частоты которых меньше, чем , распространяться в данном волноводе не могут.
На практике обычно выбирают:

 (3.5)
(3.5)
Тот факт, что внутри волноводов распространяются электромагнитные волны, а радиопередающие и радиоприемные устройства оперируют с электрическими токами и напряжениями, приводит к необходимости сопряжения этих форм радиосигналов. Одно из устройств сопряжения изображено на рис. 3.4
 |
| Рис. 3.4. Сопряжение коаксиального кабеля с волноводом |
В данном устройстве коаксиальный кабель объединен с волноводом, причем центральный проводник кабеля введен, внутрь волновода через отверстие, прорезанное в его стенке, а внешняя металлическая оплетка кабеля соединена с самим волноводом. Введенный в волновод проводник играет роль штыревой антенны, которая может работать как на передачу, так и на прием. В режиме передачи ток, пульсирующий в центральном проводнике возбуждает во внутриволноводном объёме переменное электромагнитное поле, которое, распространяясь по волноводу, далее излучается (через, например, рупорную антенну) в пространство. В режиме приема наличествует обратная картина – электромагнитное поле частоты  , принятое (например, рупорной антенной), из окружающего пространства, продвигает, по волноводу и, воздействуя на центральный проводник коаксиала, возбуждает в нем ток той же частоты , и этот ток направляется коаксиальным кабелем ко входу приемного устройства. При этом режимы передачи и приема радиосигналов, разумеется, разделены во времени.
, принятое (например, рупорной антенной), из окружающего пространства, продвигает, по волноводу и, воздействуя на центральный проводник коаксиала, возбуждает в нем ток той же частоты , и этот ток направляется коаксиальным кабелем ко входу приемного устройства. При этом режимы передачи и приема радиосигналов, разумеется, разделены во времени.
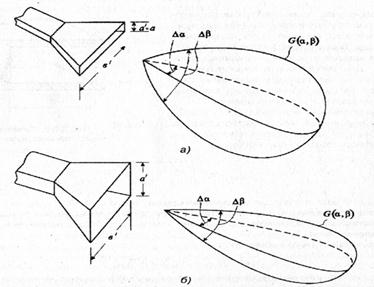 |
| Рис. 3.5. Рупорные антенны и их диаграммы направленности: а – секторная; б – пирамидная. |
Обратимся к рассмотрению упоминавшейся рупорной антенны, которая относится к антеннам апертурного (т.е. обладающего излучающей поверхностью) типа. Работа этой антенны осуществляется в сантиметровом диапазоне радиоволн.
Внешний вид рупорной антенны представлен на рис. 3.5. Ее излучающая поверхность (раскрыв) подобна сечению волновода, однако, имеет увеличенные, по сравнению с волноводом, размеры. Дело в том, что излучение электромагнитного поля непосредственно из открытого конца волновода обладает, в силу сравнительной малости размеров, и (доли и единицы сантиметров), широкой диаграммой направленности, а это означает рассеяние электромагнитной энергии в широком пространственном секторе. Для концентрации этой энергии (сужения диаграммы направленности) размеры (раскрыв рупорной антенны) должны быть, по сравнению со значениями и , увеличены.
Оценка «остроты» диаграммы направленности  производится согласно показателю, называемому шириной диаграммы направленности
производится согласно показателю, называемому шириной диаграммы направленности  , а именно, значению угла
, а именно, значению угла  или
или  , в пределах которого относительная (по сравнению с максимальной) величина напряженности электромагнитного поля спадает от 1 до 0,707. Для рупорных антенн, представленных на рис. 3.1.4, ширина соответствующей диаграммы направленности может быть рассчитана по следующим соотношениям:
, в пределах которого относительная (по сравнению с максимальной) величина напряженности электромагнитного поля спадает от 1 до 0,707. Для рупорных антенн, представленных на рис. 3.1.4, ширина соответствующей диаграммы направленности может быть рассчитана по следующим соотношениям:
секторная рупорная антенна:
 (3.6)
(3.6)

пирамидальная рупорная антенна:
 (3.7)
(3.7)

Рассмотрим пример. Пусть  см,
см,  см. Тогда ширина диаграммы направленности для пирамидального рупора составит
см. Тогда ширина диаграммы направленности для пирамидального рупора составит  . Иными словами, небольшая рупорная антенна имеет недостаточно «острую» направленность, и следует увеличивать ее размеры, что не всегда является удобным.
. Иными словами, небольшая рупорная антенна имеет недостаточно «острую» направленность, и следует увеличивать ее размеры, что не всегда является удобным.
Другим недостатком рупорной антенны является искажение фронта излучаемого электромагнитного поля, а именно – из плоского (в волноводе) этот фронт в рупорном раскрыве переформируется в цилиндрический (для секторного рупора) или почти сферический (для пирамидального рупора), что дополнительно ухудшает направленные свойства рупорных антенн. Тем не менее, на практике рупорные антенны используют достаточно часто, и не только как самостоятельные излучающие антенны (когда требуется широкая диаграмма направленности), но также в качестве одного из элементов (облучателя для рефлектора) антенной системы, если необходимо иметь итоговую узкую диаграмму направленности.
Другим типом антенн, широко применяемых в радиолокационной практике, являются зеркальные (рефлекторные) антенны, которые за счет специально подобранного профиля формируют требуемую диаграмму направленности. Это происходит путем отражения и последующей фокусировки электромагнитного поля, падающего на них от облучателя.
Зеркальные антенны, как правило, просты конструктивно, обладают значительной диапозонностью (используется для роботы с сантиметровыми, дециметровыми и, отчасти, метровыми радиоволнами) и позволяют получать диаграмму направленности практически любого вида.
На практике очень часто применяют параболические зеркальные антенны (рис 3.6) поверхность которых имеет форму параболоида вращения. В этом случае ширина диаграммы направленности определяется согласно выражению:
 (3.8)
(3.8)
а величины  и
и  выбираются из условия:
выбираются из условия:  . Например, для см и
. Например, для см и  м ширина диаграммы направленности (
м ширина диаграммы направленности ( ) составляет 2,16º…2,4º, что является вполне приемлемым.
) составляет 2,16º…2,4º, что является вполне приемлемым.
 |
| Рис. 3.6. Параболическая зеркальная антенна и ее диаграмма направленности. |
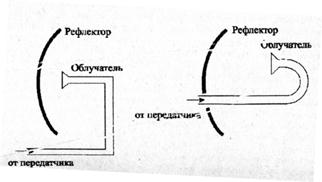
Облучение параболической зеркальной антенны с помощью рупора возможно в конструктивно различных вариантах (рис. 3.7). При этом рупор, конечно, принимает на себя часть электромагнитной энергии, отраженной параболоидом, и данная энергия оказывается потерянной, однако, отмеченный эффект «затенения» невелик. Следует отметить, что параболический рефлектор преобразует сферический фронт падающей на него электромагнитной волны в плоский. Последнее обстоятельство обусловлено тем, что луч, идущий к поверхности параболоида из фокуса (где расположен рупор-облучатель), далее, отразившись, становится параллельным оси параболоида.
 |
| Рис. 3.7. Облучение параболической зеркальной антенны с помощью рупора |
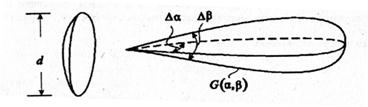
Вместе с тем, существуют ситуации (например, при установке параболической антенны в носовой части истребителя), когда диаметр (рис. 3.6) раскрыва параболоида должен быть небольшим (порядка 15…30 см). В этом случае эффект «затенения» оказывается значительным и, чтобы снизить его влияние, вместо рупорного облучателя применяют конструкцию «вибратор – дисковый контррефлектор», показанную на рис. 3.8.
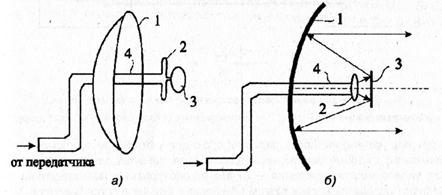 |
| Рис. 3.8. Зеркальная антенна (а) и картина в этой антенне для режима излучения (б): 1 – параболический рефлектор; 2 – вибраторный излучатель; 3 – дисковый контррефлектор; 4 – линия передачи. |
В этой конструкции линия передачи 4 проходит через вершину параболического рефлектора 1 и представляет собой коаксиальный кабель. В режиме излучения радиосигнал, поступающий от радиопередающего устройства, возбуждает вибратор 2, который создает вокруг себя электромагнитное поле. Это поле отражается от дискового контррефлектора 3 и, попав на внутреннюю поверхность параболического рефлектора 1, далее направляется в пространство.
Общей особенностью рассмотренных выше антенн является возможность их работы не только в режиме излучения электромагнитной энергии, но и в режиме приема электромагнитных волн. При этом радиосигнал, пришедший из пространства, попадает на рефлектор и далее, отражаясь от него, фокусируется на облучателе, после чего по линии передачи поступает на вход радиоприемного устройства. Такие антенны, осуществляющие как излучение радиосигнала, так и его прием, носят название приемо-передающих. К их числу относится большинство антенн, используемых в радиолокационных системах, в частности, рупорные и параболические.
Поскольку многие из радиолокационных систем имеют именно приемо-передающие антенны, то в таких системах неизбежно возникает проблема развязки радиоприемного и радиопередающего устройств по излучаемому радиосигналу.
Это означает, что мощный излучаемый радиосигнал должен направляться исключительно в антенну и не должен попадать в радиоприемное устройство. Указанную функцию развязки выполняет антенный переключатель.
Упрощенная схема построения антенного переключателя приведена на рис. 3.9. Принцип работы этой схемы заключается в следующем. Радиопередающее 1 и радиоприемное 2 устройства соединены двухпроводной линией, из точек М которой имеется выход к антенне. На участке «АА – радиоприемное устройство, на расстоянии 0,25 от точек АА, включен газовый разрядник 3. Участок «радиопередающее устройство – АА» имеет длину 0,5 .
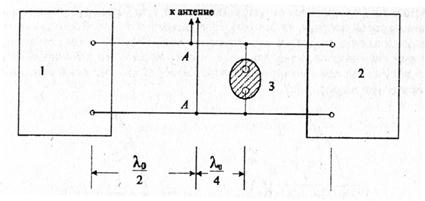 |
| Рис. 3.9. Упрощенная схема построения антенного переключателя: 1 – радиопередающее устройство; 2 – радиоприемного устройство; 3 – газовый разрядник. |
В режиме излучения, когда радиопередающее устройство 1 создает мощный радиоимпульс, газовый разрядник 3 пробивается, замыкая двухпроводную линию в точке своего местонахождения – от этого короткозамкнутая четвертьволновая линия будет создавать между точками АА весьма большое сопротивление. Следовательно, в радиоприемное устройство 1 будет просачиваться весьма малое напряжение, что и является целью установки антенного переключателя.
В режиме же приема, когда радиосигнал малой мощности вводится от антенны в двухпроводную линию, газовый разрядник 3 пробиваться не будет, и радиоприемное устройство 2 воспримет поступивший от антенны радиосигнал. Что касается радиопередающего устройства 1, то его выходное сопротивление будет достаточно велико (за счет наличия полуволнового участка двухпроводной линии), и поступивший от антенны радиосигнал не попадет в радиопередающее устройство 1.
В настоящее время среди антенных систем все более важное место занимают так называемые антенные решетки, т.е. антенны, состоящие не из одного, а из многих приемо-передающих элементов. Например, для бортовой антенной решетки число указанных элементов, располагающихся на общей площади в 1 м2, может составлять несколько десятков, а то и сотен.
Рассмотрим принцип функционирования антенной решетки. Начнем с режима излучения.
Предположим, для простоты, что антенная решетка состоит всего из двух элементов (рис. 3.10), каждый из которых излучает в пространство непрерывное колебание частоты  . Поскольку размеры излучателя каждого элемента невелики ·(для бортовых антенных решеток – не более нескольких сантиметров), то любой из этих элементов заполняет высокочастотной электромагнитной энергией сравнительно широкий пространственный сектор. Разумеется, данные секторы перекрываются и в области их наложения возникает интерференция радиоволн. Это приводит к тому, что суммарная энергия, излучаемая двухэлементной антенной решеткой, оказывается пространственно неравномерной, а именно, изменяющейся от максимальной (в том направлении, где радиосигналы обоих элементов окажутся синфазными, и следовательно, будут складываться в пространстве) до нулевой (пространственное вычитание радиосигналов, оказавшихся в противофазе, в другом направлении). То направление, в котором осуществляется пространственное суммирование, будет задавать координату максимума диаграммы направленности рассматриваемой антенной решетки. Если обратиться к рис. 3.10, то координатой максимума указанной диаграммы направленности будет угол
. Поскольку размеры излучателя каждого элемента невелики ·(для бортовых антенных решеток – не более нескольких сантиметров), то любой из этих элементов заполняет высокочастотной электромагнитной энергией сравнительно широкий пространственный сектор. Разумеется, данные секторы перекрываются и в области их наложения возникает интерференция радиоволн. Это приводит к тому, что суммарная энергия, излучаемая двухэлементной антенной решеткой, оказывается пространственно неравномерной, а именно, изменяющейся от максимальной (в том направлении, где радиосигналы обоих элементов окажутся синфазными, и следовательно, будут складываться в пространстве) до нулевой (пространственное вычитание радиосигналов, оказавшихся в противофазе, в другом направлении). То направление, в котором осуществляется пространственное суммирование, будет задавать координату максимума диаграммы направленности рассматриваемой антенной решетки. Если обратиться к рис. 3.10, то координатой максимума указанной диаграммы направленности будет угол  .
.
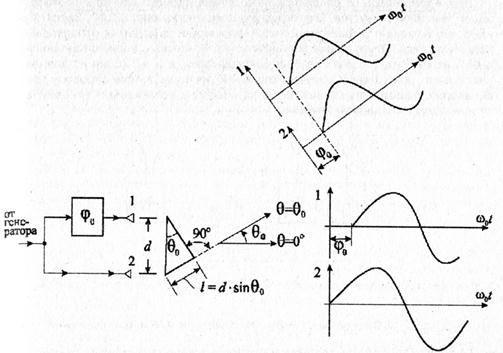 |
| Рис. 3.10. К принципу функционирования двухэлементной фазированной антенной решетки (ФАР) в режиме излучения |
Величину угла нетрудно подсчитать, исходя из геометрических соображений, а именно: поскольку фазовращатель  находится в канале только одного элемента, то для компенсации радиосигнал, излучаемый другим элементом, должен пройти дополнительный путь
находится в канале только одного элемента, то для компенсации радиосигнал, излучаемый другим элементом, должен пройти дополнительный путь  равный
равный
 , (3.9)
, (3.9)
где  – расстояние между элементами.
– расстояние между элементами.
Тогда и будет обеспечена синфазность обоих радиосигналов на направлении . Приравнивая набег фазы радиосигнала на расстоянии l величине  , получим:
, получим:
 (3.10)
(3.10)
откуда
 (3.11)
(3.11)
Что касается угла  , то в данном пространственном направлении для рассматриваемого случая будет происходить лишь частичное суммирование излучаемых радиосигналов.
, то в данном пространственном направлении для рассматриваемого случая будет происходить лишь частичное суммирование излучаемых радиосигналов.
Выражение (3.11), в частности, означает, что если фазовращатель в канале элемента 1 сделать управляемым (т. е. изменять значение ), то максимум диаграммы направленности двухэлементной антенной решетки будет менять свое положение  в пространстве, осуществляя так называемое сканирование (качание луча).
в пространстве, осуществляя так называемое сканирование (качание луча).
Перейдем теперь от рассмотренного элементарного случая к соответствующей линейной структуре. Эта структура показана на рис. 3.11. Здесь  элементов с помощью фазовращателей формируют диаграмму направленности заданного вида. Отметим два обстоятельства. Во-первых, в данной антенной решетке может существовать не фазовращателей, а – 1 (один из элементов, как правило, центральный, излучает колебание, не подвергнутое фазовому сдвигу). Во-вторых, указанная антенная решетка способна организовать не одну, а несколько диаграмм направленности.
элементов с помощью фазовращателей формируют диаграмму направленности заданного вида. Отметим два обстоятельства. Во-первых, в данной антенной решетке может существовать не фазовращателей, а – 1 (один из элементов, как правило, центральный, излучает колебание, не подвергнутое фазовому сдвигу). Во-вторых, указанная антенная решетка способна организовать не одну, а несколько диаграмм направленности.
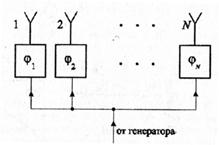 |
| Рис. 3.11. Структура многоэлементной линейной ФАР (режим излучения) |
Поскольку компоновка требуемой картины электромагнитного поля осуществляется с помощью фазовращателей, то данная антенна называется фазированной антенной решеткой (ФАР) линейного типа.
В наиболее часто встречающемся на практике случае значения фаз 
 , описываются линейным законом:
, описываются линейным законом:
 (3.12)
(3.12)
а расстояния  между элементами выбираются одинаковыми
между элементами выбираются одинаковыми  и равным примерно 0,5
и равным примерно 0,5  . В этом случае антенная решетка формирует линейный фазовый фронт излучений, распространяющийся в направлении
. В этом случае антенная решетка формирует линейный фазовый фронт излучений, распространяющийся в направлении  максимум диаграммы направленности.
максимум диаграммы направленности.
Необходимо отметить, что пространственное качание (сканирование) диаграммы направленности ФАР выполняется без механического поворота всей конструкции ФАР, а исключительно за счет управления фазовращателями. Поэтому в случае использования ФАР обычно говорят об электронном (т.е. безынерционном) сканировании, подразумевая высокоскоростное изменение фаз  и, следовательно, высокоскоростное перемещение диаграммы направленности. Типичное время облучения пространственного сектора в диапазоне углов
и, следовательно, высокоскоростное перемещение диаграммы направленности. Типичное время облучения пространственного сектора в диапазоне углов  ±60º (учитываются перемещения либо по азимуту
±60º (учитываются перемещения либо по азимуту  , либо по угле места
, либо по угле места  ) составляет значение от несколько десятков миллисекунд до нескольких (3...7) с.
) составляет значение от несколько десятков миллисекунд до нескольких (3...7) с.
Что касается принципа функционирования ФАР в другом режиме, а именно в режиме приема, то алгоритм, связывающий (для двухэлементной ФАР) величины  и
и  , может быть получен на основании рассуждений, использованных ранее при рассмотрении режима излучения. Например, будем понимать под углом то направление, с которого радиосигнал принимается наилучшим образом (обеспечивается максимум сигнала на выходе ФАР). Ясно что данное направление будет соответствовать координате максимума уже не передающей, а приемной диаграммы направленности. Рассуждая аналогично тому, как это делалось для режима излучения, придем к соотношению
, может быть получен на основании рассуждений, использованных ранее при рассмотрении режима излучения. Например, будем понимать под углом то направление, с которого радиосигнал принимается наилучшим образом (обеспечивается максимум сигнала на выходе ФАР). Ясно что данное направление будет соответствовать координате максимума уже не передающей, а приемной диаграммы направленности. Рассуждая аналогично тому, как это делалось для режима излучения, придем к соотношению
 (3.13)
(3.13)
совпадающему с выражением (3.11). Это означает, что для приемно-передающей ФАР положение максимумов диаграмм направленности как для режима излучения, так и для режима приема оказывается одним и тем же. Другим выводом является заключение о возможности электронного (безынерционного) сканирования также и в режиме приема.
Соображения, изложенные для двухэлементной приемной ФАР, могут быть распространены и на – элементную линейную приемную ФАР. Что касается другого весьма важного параметра ФАР, а именно ширины диаграммы направленности ( ), то она для
), то она для  может быть рассчитана согласно выражению
может быть рассчитана согласно выражению
 (3.14)
(3.14)
где  – рабочая длина волны;
– рабочая длина волны;  – расстояние между элементами; – количество элементов.
– расстояние между элементами; – количество элементов.
К недостаткам, присущим ФАР, помимо сложности изготовления и высокой стоимости, следует отнести как ограниченность сектора сканирования (при неподвижной ФАР отклонение максимума диаграммы направленности от нормали к линии излучателей обычно не превышает  =60º), так и снижение максимума дальности действия (рис. 3.12, а) при 0< <0ГР, обусловленное расширением диаграммы направленности, (рис. 3.12, б):
=60º), так и снижение максимума дальности действия (рис. 3.12, а) при 0< <0ГР, обусловленное расширением диаграммы направленности, (рис. 3.12, б):
 (3.15)
(3.15)
где  – ширина диаграммы направленности линейной ФАР при угле отклонения максимума этой диаграммы от нормали к линии излучателей.
– ширина диаграммы направленности линейной ФАР при угле отклонения максимума этой диаграммы от нормали к линии излучателей.
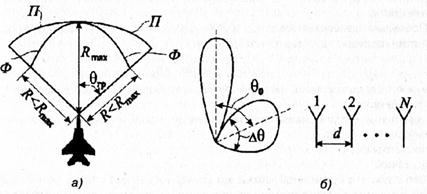 |
Рис. 3.12. Явление снижения дальности (а) и расширения диаграммы направленности ФАР в пределах сектора сканирования (б): П – кривая максимальных дальностей действия зеркальной (параболической) антенны для различных углов ( ) сканирования; ) сканирования;  – кривая максимальных дальностей действия ФАР для различных углов () сканирования; 1,2… – номера излучающих элементов; – расстояние ( – кривая максимальных дальностей действия ФАР для различных углов () сканирования; 1,2… – номера излучающих элементов; – расстояние ( ) между излучающими элементами. ) между излучающими элементами. |
В практике авиационных радиосистем обычно используют не только линейные, но и плоские ФАР (рис. 3.13), которые представляют собой совокупность многих элементов, распределенных по площади некой плоской фигуры (квадрат, прямоугольник, круг, эллипс и т.д.). В литературе такие плоские ФАР иногда называются двумерными. Сложность функционирования плоских ФАР, разумеется значительно выше, чем у линейных ФАР, однако, физический принцип их действия остается неизменным – организация пространственного луча за счет специально созданной интерференции излучаемых колебаний (в режиме передачи) и формирование в антенной решетке (для режима и приема) фазовой структуры, адекватной фазовой картине колебания, приходящего из пространства.
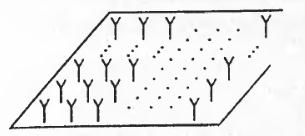 |
| Рис. 3.13. Структура многоэлементной ФАР |
Традиционное место установки бортовых плоских ФАР работающих, как правило в сантиметровом диапазоне волн, – носовая часть самолета. Типовые значения: ширина диаграммы направленности ()– 2...7º; площадь – 0,25...1,5 м2; масса – 2...8 кг.
С точки зрения повышения эффективности ФАР (расширение сектора сканирования, постоянство ширины диаграммы направленности при ее пространственном перемещении и т.д.) перспективным направлением считается создание неплоских (выпуклых, объемного типа) ФАР.
Таковы основные разновидности антенн, наиболее часто применяемых в радиолокационных системах.
Рассмотрим методы определения различных координат объекта.

