 2015-04-01
2015-04-01 640
640Рассмотрим движение буксируемого объекта (БО) под действием буксирной связи (рис 2.16). Отметим, что вектор  . Обозначим:
. Обозначим:  - поперечная координата клюзовой точки К1;
- поперечная координата клюзовой точки К1;  - поперечная координата клюзовой точки К2;
- поперечная координата клюзовой точки К2;  - продольная координата клюзовой точки К2;
- продольная координата клюзовой точки К2;  - угол отклонения буксирной связи (БС), измеряемый от направления движением
- угол отклонения буксирной связи (БС), измеряемый от направления движением  .
.
Натяжение буксирной связи  разложим на продольную
разложим на продольную  и поперечную
и поперечную  составляющие. Продольная составляющая является тягой БС, и обеспечивает продольное движение БО. Поперечная составляющая вызывает движение в поперечном направлении и поворот корпуса БО по курсу под действием момента
составляющие. Продольная составляющая является тягой БС, и обеспечивает продольное движение БО. Поперечная составляющая вызывает движение в поперечном направлении и поворот корпуса БО по курсу под действием момента  , который является рулевым моментом.
, который является рулевым моментом.
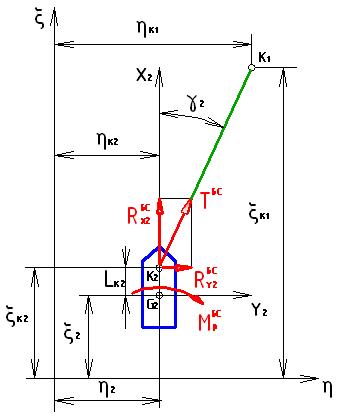
Рис 2.16. Схема действия буксирной связи
Сила и  появляются при отклонении БС на угол в нужном направлении. Это достигается поперечным смещением клюзовой точки буксировщика К1.
появляются при отклонении БС на угол в нужном направлении. Это достигается поперечным смещением клюзовой точки буксировщика К1.
Угол назовем углом управления. Угол управления можно найти как:
 . (2.63)
. (2.63)
Знак угла будем считать положительным при отклонении БС вправо относительно БО.
Натяжение буксирной связи  зависит от отношения
зависит от отношения  , где
, где  , и от погонного веса БС. Натяжение может быть представлено жёсткостной характеристикой БС в виде формулы:
, и от погонного веса БС. Натяжение может быть представлено жёсткостной характеристикой БС в виде формулы:
 , (2.64)
, (2.64)
где:  - показатель степени;
- показатель степени;  - коэффициенты аппроксимации;
- коэффициенты аппроксимации;  - номинальное натяжение;
- номинальное натяжение;  - длина БС;
- длина БС;  - проекция БС на горизонтальную плоскость ватерлинии.
- проекция БС на горизонтальную плоскость ватерлинии.
Определение реакций отдельной буксирной связи в общем виде представляет весьма сложную задачу, требующую интегрирования системы дифференциальных уравнений движения нити в частных производных. С целью упрощения задачи и уменьшения времени счёта, в первом приближении, можно ограничиться квазистатическим методом расчёта буксирной связи.
Для использования этого метода вводят упрощающие допущения:
- форма буксирной связи определяется силами тяжести и описывается уравнениями гибкой нерастяжимой нити;
- применима гипотеза квазистационарности;
- считается возможным применить принцип суперпозиции в определении результирующей реакции связи в клюзе;
- буксирная связь лежит в плоскости, содержащей оба клюза.
Рассмотрим буксирную связь. Концы связи лежат: точка  - на буксируемом объекте и в неподвижной системе координат имеет координаты
- на буксируемом объекте и в неподвижной системе координат имеет координаты  , точка
, точка  - на буксире, координаты точки
- на буксире, координаты точки  . Уравнение гибкой связи имеет вид:
. Уравнение гибкой связи имеет вид:
 (2.65)
(2.65)
где:  - оси связанной со связью системы координат;
- оси связанной со связью системы координат;  - параметр связи;
- параметр связи;  - погонный вес единицы длины связи;
- погонный вес единицы длины связи;  - горизонтальная составляющая натяжения связи.
- горизонтальная составляющая натяжения связи.
Это известное уравнение, описывающее положение равновесия гибкой и нерастяжимой однородной нити, находящейся в поле силы тяжести.
Стрелка прогиба нити f определится по формуле:
 (2.66)
(2.66)
где:  - отстояние конца нити - точки , от начала координат.
- отстояние конца нити - точки , от начала координат.
Зная расстояние между концами буксирной связи  , можно определить длину связи:
, можно определить длину связи:
 (2.67)
(2.67)
Горизонтальная составляющая натяжения определяется по формуле:
 (2.68)
(2.68)
Используя формулу (2.64), учтя при этом граничные условия для концов связи, натяжение в любой точки нити можно определить так:
 . (2.69)
. (2.69)
Величины натяжений в клюзовых точках будут соответственно равны:
 (2.70)
(2.70)
Вертикальные составляющие натяжения в клюзах будут определяться как:
 (2.71)
(2.71)
В процессе движения буксирного состава, расстояние между объектами постоянно меняется, следовательно, изменяется и натяжение в БС. Поэтому в каждый момент времени при численном интегрировании уравнений (2.1) данный расчет должен выполняться.
Можно выделить 2 стратегии в управлении буксируемых систем:
1. Управление движением осуществляется из рубки буксировщика. Управление осуществляется с помощью курса следования буксировщика. Буксируемый объект должен двигаться вслед за буксировщиком по той же траектории в пределах допускаемых отклонений.
2. Управление осуществляется из ЦПУ буксируемого объекта путем задания с помощью буксировщика требуемого направления буксирной связи -  .
.
В зависимости от принятой стратегии управления движением состава должны быть и выбраны характерные маневры состава.








