 2015-04-01
2015-04-01 1335
1335Большинство морских и речных судов в качестве движителей имеют гребной винт. Гребной винт проектируется на условия основного ходового режима со скоростью  и частотой вращения
и частотой вращения  . Упор Т и момент МВ гребного винта определяются в виде:
. Упор Т и момент МВ гребного винта определяются в виде:  ;
;  . Коэффициенты К1 и К2 определяются по диаграммам в зависимости от шагового отношения винта и относительной поступи
. Коэффициенты К1 и К2 определяются по диаграммам в зависимости от шагового отношения винта и относительной поступи  , диапазон изменения которой составляет от 0 (швартовный режим) до поступи нулевого упора
, диапазон изменения которой составляет от 0 (швартовный режим) до поступи нулевого упора  (турбинный режим).
(турбинный режим).
В расчетах управляемости такое представление характеристик действия ГВ является недостаточным и неудобным, поскольку изменение параметров движения корпуса и режима работы двигателя могут изменяться при выполнении маневра в широких пределах, в том числе и со сменой направления движения (+ - передний ход; - - задний ход). При застопоренном ГВ (n=0) относительная поступь lP обращается в бесконечность.
По этой причине В.Г. Бакаев и В.М. Лаврентьев / 4 / предложили другое представление Т и М гребного винта:
 ;
;
 ,
,
где коэффициенты упора  и момента
и момента  определяются в зависимости от шагового отношения ГВ и обобщенной поступи
определяются в зависимости от шагового отношения ГВ и обобщенной поступи  .
.
Обобщенная поступь охватывает все возможные режимы работы ГВ ( u; n). Ими были проведены систематизированные испытания моделей открытых ГВ на переднем и заднем ходу, а И.А. Титовым разработана расчетная методика определения упора и момента ГВ на этих режимах движения, которая приведена в справочнике / 4 /.
u; n). Ими были проведены систематизированные испытания моделей открытых ГВ на переднем и заднем ходу, а И.А. Титовым разработана расчетная методика определения упора и момента ГВ на этих режимах движения, которая приведена в справочнике / 4 /.
Варьируя скорость и направление движения корпуса и гребного вала, по этой методике определяем упор и момент ГВ и строим диаграммы:  ;
;  , как это показано на рис. 2.8.
, как это показано на рис. 2.8.
Аналогичная методика для ГВ в НН предложена В.И. Зайковым, с которой можно ознакомиться в справочнике / 14 /.
Данные диаграммы, которые называют винтовыми характеристиками ГВ, можно табулировать и использовать в программах расчета управляемости судна. Однако, вид кривых упора и момента ГВ позволяет достаточно точно аппроксимировать их. В.И. Небесновым / 7 / предложена такая форма аппроксимации:
 ;
;
(2.37)
 .
.
где  и
и  - полезная тяга и момент ГВ на номинальном режиме движения;
- полезная тяга и момент ГВ на номинальном режиме движения;  - относительная частота вращения;
- относительная частота вращения;  - относительная скорость движения корпуса;
- относительная скорость движения корпуса;  - коэффициенты аппроксимации, определяемые отдельно для переднего хода и для заднего хода.
- коэффициенты аппроксимации, определяемые отдельно для переднего хода и для заднего хода.
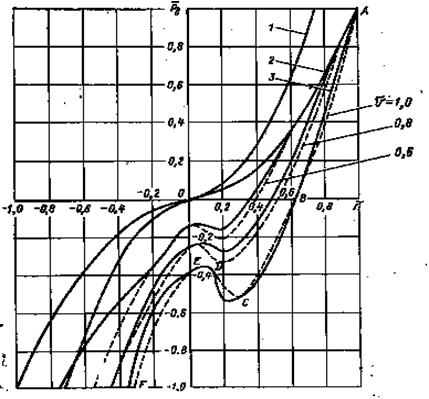
Рис. 2.8. Винтовые характеристики судна.
В случае криволинейного движения судна скорость натекания воды на ГВ будет отличной от скорости при прямолинейном движении, как по величине, так и по направлению. Рассмотрим это на диаграмме скоростей на рис. 2.9.
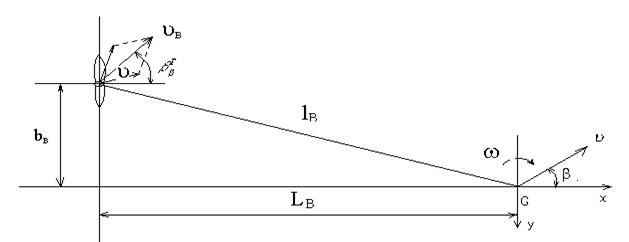
Рис. 2.9. Схема векторов скоростей.
Решение этой геометрической задачи дает такие выражения для скорости и угла натекания воды на ГВ:
 (2.38)
(2.38)

В этих формулах обозначено:
 - относительная абсцисса ГВ;
- относительная абсцисса ГВ;
 - относительная ордината ГВ.
- относительная ордината ГВ.
Корпус судна оказывает спрямляющее действие на поток воды и это учитывается коэффициентом влияния
 (2.39)
(2.39)
который принимается по эмпирическим данным / 4, 5 / равным 0.3 для диаметрального ГВ при развитом кормовом дейдвуде; равным 0.5 для бортовых ГВ при развитом кормовом дейдвуде; равным 1.0, если корма транцевая и дейдвуд отсутствует. Для более точного определения следует проводить модельный эксперимент.
Влияние корпуса на скорость uв, как правило, не учитывается.
При косом натекании воды на ГВ возникает еще и поперечная гидродинамическая сила Q, которая направлена в сторону поперечной составляющей скорости потока воды.
Величину поперечной силы можно представить в таком виде / 4 /:
 ;
;
(2.40)
 .
.
В формулах (2.38) обозначено
 - относительная поступь ГВ в базовом ходовом режиме движения;
- относительная поступь ГВ в базовом ходовом режиме движения;
 - поступь нулевого момента;
- поступь нулевого момента;
 - коэффициент упора ГВ при базовом режиме движения;
- коэффициент упора ГВ при базовом режиме движения;
 - коэффициент момента ГВ на швартовых;
- коэффициент момента ГВ на швартовых;
 - относительный радиус центра давления лопасти ГВ, приблизительно равный 0.7.
- относительный радиус центра давления лопасти ГВ, приблизительно равный 0.7.
Поперечную силу ГВ в НН, по рекомендации А.Д. Гофмана /6, 14/, можно не учитывать.








