2015-04-01
2015-04-01 1021
1021Учебное пособие по дисциплине
Для студентов специальности 2202
Доцент кафедры АСОИУ Валов О.П.
Казань 2003
Министерство образования Российской Федерации
КАЗАНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ им.А.Н.Туполева
кафедра АВТОМАТИЗИРОВАННЫХ СИСТЕМ ОБРАБОТКИ ИНФОРМАЦИИ И УПРАВЛЕНИЯ
.
Учебное пособие по дисциплине
СИСТЕМЫ РЕАЛЬНОГО ВРЕМЕНИ
Для студентов специальности 2202
доцент кафедры АСОИУ Валов О.П.
Рекомендовано УМО вузов по университетскому политехническому образованию в качестве учебного пособия для студентов высших учебных заведений, обучающихся по направлению 654600 – Информатика и вычислительная техника, специальности 220200 – Автоматизированные системы обработки информации и управления.
Казань 2003
Курс «СИСТЕМЫ РЕАЛЬНОГО ВРЕМЕНИ».
7семестр
Лекция – 2часа в неделю, всего 17 лекций.
Лабораторные работы – 4.
Курсовой проект.
ЛИТЕРАТУРА.
1. О.Н.Новоселов, А.Ф.Фомин
Основы теории и расчета информационно-измерительных систем.
М. Машиностроение, 1991.
2. А.Н.Дядюнов, Ю.А. Онищенко, А.И. Серин
Адаптивные системы сбора и передачи информации. М. Машиностроение, 1988.
3. Сопряжение датчиков и устройств ввода данных с компьютерами IBM PC.
Под редакцией У.Томпкинса и Дж. Уэбстера. Мир, 1992.
4. В.Л.Виттих, В.А.Цибатов
Оптимизация бортовых систем сбора и обработки данных. М. Наука, 1985.
5. К.Л. Куликовский, В.Я. Купер.
Методы и средства измерений. Энергоатомиздат, 1986.
6. Л.Фолкенберри. Применение операционных усилителей и линейных И.С.
М.Мир.1995.
7. Микропроцессоры 2. Средства сопряжения, контролирующие и информационно-
управляющие системы. М. Мир, 1984.
8. В.Фритч. Применение микропроцессоров в системах управления. М.Мир, 1984.
 Функции Систем реального времени (в соответствии с названием изучаемого курса)
Функции Систем реального времени (в соответствии с названием изучаемого курса)
в узком смысле осуществляются с помощью информационно-измерительных систем (ИИС), в широком – с помощью автоматизированных систем обработки информации и управления (АСОИУ). Рассмотрим генезис (происхождение, возникновение, процесс образования) названия курса и собственно названия ИИС и АСОИУ. Напомним, что под понятием система имеется в виду совокупность элементов, понятий и т.д., образующих некоторую целостность и подчиненных определенному руководящему принципу. Система называется системой реального времени (СРВ) если правильность ее функционирования зависит не только от корректности действий, но и от времени, за которое эти действия происходят. То есть для событий, происходящих в такой системе, то, когда эти события происходят, так же важно, как и логическая корректность самих событий. Говорят, что система работает в реальном времени, если ее быстродействие адекватно скорости протекания физических процессов на ее объектах обработки информации и управления.
Система сбора и обработки информации – СОИ – совокупность технических средств и программного обеспечения, предназначенных для информационного обслуживания пользователей и технических объектов. В состав технических средств СОИ входят оборудование для ввода, хранения, преобразования и вывода информации, вычислительный комплекс - ВК, устройства сопряжения ВК с объектами, аппаратура передачи данных и линии связи.
 Если человек оператор входит в состав СОИ как звено системы и в ней предусмотрены управляющие связи с объектом управления (источником информации) говорят о автоматизированной системе обработки информации и управления – АСОИУ.
Если человек оператор входит в состав СОИ как звено системы и в ней предусмотрены управляющие связи с объектом управления (источником информации) говорят о автоматизированной системе обработки информации и управления – АСОИУ.
Наиболее понятным примером АСОИУ является сам человек. 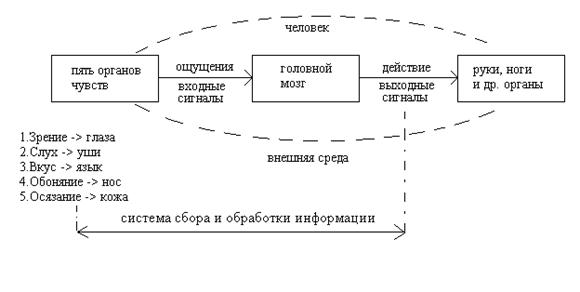
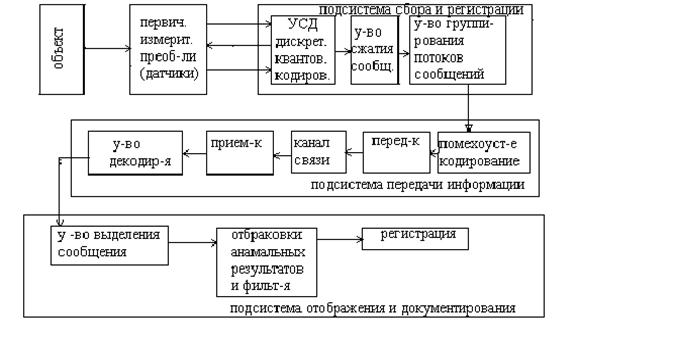
Архитектурным эквивалентом человеческой системы в некотором смысле является техническая система СОИУ, представленная ниже. Иногда говорят - система сбора и обработки данных, поскольку сбор представляет собой также этап обработки информации, или короче говоря просто система обработки данных (СОД). Сообщения, представленные в виде, удобном для обработки с помощью вычислительных средств, называют данными. Процесс получения аналогового сигнала с какого-либо датчика, его предварительную обработку, преобразование в цифровую форму и ввод в память ЭВМ будем называть сбором данных.
Система обработки данных – СОД, работающая в режиме реального времени – РВ должна собрать данные, произвести их обработку в соответствии с заданными алгоритмами и выдать управляющее воздействие за такой промежуток времени, который обеспечивает успешное выполнение поставленных перед системой задач. Принято различать системы жесткого и мягкого реального времени. Системой жесткого реального времени называют систему, для которой неспособность обеспечения реакции на какие-то события в заданное время является отказом и ведет к невозможности решения поставленной задачи. Строго говоря, время реакции может составлять и секунды и часы и даже недели, но на практике для систем жесткого реального времени оно бывает очень малым. В СРВ с мягким реальным временем удовлетворение заданных временных характеристик осуществляется «в среднем», так как они не успевают все делать всегда в заданное время.
Примеры СОД, настроенных для решения различных задач:
Вычислительные системы для решения научно-инженерных, учетно-статистических и других задач.
Автоматизированные системы управления предприятиями – АСУП.
Автоматизированные системы управления технологическими процессами – АСУТП.
Информационно-измерительные системы -ИИС.
Информационно-измерительной системой (ИИС) называется совокупность функционально связанных устройств, которые наряду с измерением (т.е. нахождением значения физической величины с помощью специальных технических средств) обеспечивает необходимое информационное обслуживание контролируемого объекта, включающее автоматический сбор, представление, передачу, запоминание, регистрацию и обработку измерительной информации. Данные в ИИС представляют собой измерительную или, если передаются по каналам связи, телеметрическую информацию. Т.е. в том случае, когда передача сообщения осуществляется по кабельной линии или радиолинии говорят соответственно о телеметрической или о радиотелеметрической ИИС.
 |
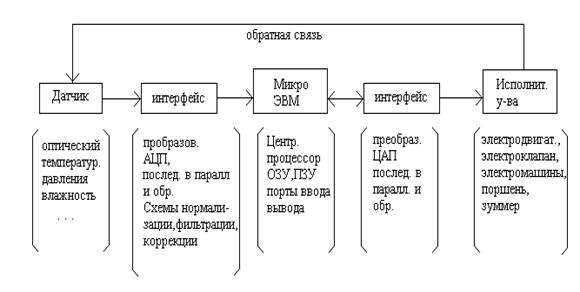
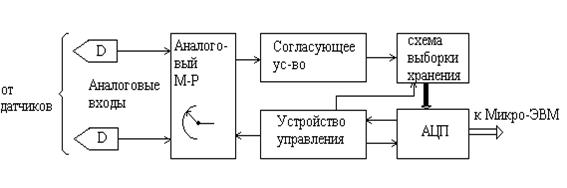
В состав подсистемы сбора и регистрации данных ИИС входит устройство сбора данных - УСД, основными функциями которого являются дискретизация, квантование и кодирование аналоговых сигналов. На рисунке ниже представлена структура УСД, во
втором ряду та же цепочка звеньев УСД представлена с условными обозначениями, принятыми при изображении их на чертежах функциональных схем.
Основными звеньями УСД являются: ИМ - измерительный мост, СУ - согласующее устройство, СН - схема нормализации, ФП – функциональный преобразователь, УВХ – устройство выборки-хранения, АЦП – аналого-цифровой преобразователь. В том случае, когда АЦП обслуживает несколько измерительных каналов, в состав УСД включают (до или после УВХ) аналоговый мультиплексор - АМ.
Функциональная схема УСД.
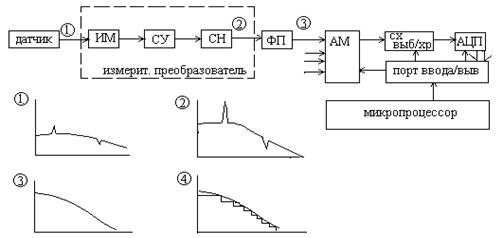
Контролируемый параметр – уровень напряжения, ток, давление,
температура и т.п. с помощью соответствующего датчика преобразуется в электрический сигнал. Если сигнал на выходе датчика недостаточен для последующей обработки то он усиливается с соответствующим масштабом усиления. Далее с помощью активного фильтра из сигнала удаляются нежелательные низкочастотные и высокочастотные составляющие. Если сигнал предварительно не фильтруется то это приводит к искажению его при дискретизации.
Ниже на рисунке рассматривается пример неправильного выбора шага дискретизации постоянного напряжения с наложенным на него шумом, представленным синусоидой.
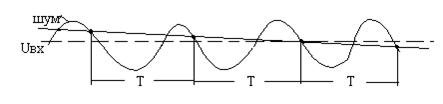 |
Из приведенного примера видно, что непрерывно изменяющийся входной сигнал заменяется совокупностью дискретных периодически измеренных значений, причем внутри каждого интервала амплитуда сигнала сохраняется неизменной.
Процесс квантования искажает входной сигнал. Теорема Котельникова о дискретном представлении утверждает, что для восстановления первоначального сигнала без потери передаваемой информации из его дискретного эквивалента частота опроса должна по крайней мере вдвое превышать самую высокочастотную гармоническую составляющую входного сигнала. Частота квантования ограничена сверху скоростью работы АЦП.
Если во входном сигнале имеются гармонические составляющие с более высокой частотой, чем частота квантования, то при восстановлении аналогового сигнала они вызовут разностные частотные составляющие, искажающие сигнал. Для предотвращения такого искажения следует использовать фильтр нижних частот, который бы не пропускал все составляющие сигнала, имеющие частоту выше частоты квантования. Только при этих условиях процесс квантования не вызовет потерь информации, содержащейся во входном сигнале. Естественно, характер предварительной обработки зависит почти полностью от вида датчика. Всевозможные датчики имеют самые разнообразные выходные сигналы.
Например, возьмем три температурных датчика: в термопаре в зависимости от температуры изменяется напряжение; в терморезисторе – сопротивление; в полупроводниковом диоде – электрический ток.
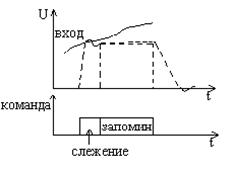
Предварительная обработка упрощает и облегчает дальнейшие операции над сигналами. Кроме этого могут быть предприняты специальные функциональные преобразования сигнала с целью линеаризации передаточной функции датчика. Отфильтрованный сигнал поступает через аналоговый мультиплексор на устройство слежения (выборки-хранения). Применение мультиплексора позволяет в режиме разделения времени использовать единственный аналого-цифровой преобразователь (АЦП) для многих каналов, экономя тем самым дорогостоящее оборудование. Преобразование аналоговой величины в цифровую всегда происходит за конечный промежуток времени. В течение этого промежутка сигнал на входе АЦП должен поддерживаться неизменным. Эту функцию выполняет устройство выборки/хранения, сигнал на выходе которого пропорционален сигналу на входе до тех пор, пока не последует команда запоминания, после которой сигнал на выходе остается постоянным в течении промежутка времени, необходимого для преобразования сигнала в цифровую форму.
 |
АЦП преобразует уровень напряжения на входе в соответствующую цифровую величину. Далее цифровые данные через интерфейсные схемы поступают на общую магистраль микро-ЭВМ, где подвергаются операциям нормализации, фильтрации, сглаживания, сжатия и т.д.. Говорят, что в УСД и микро-ЭВМ сигнал подвергается операциям первичной обработки.
Итак, в общем случае, исходя из требований ввода информации в микро-ЭВМ структура УСД должна содержать:
- блок преобразователя аналоговых сигналов датчика в цифровые коды (АЦП);
- цифровые и аналоговые коммутаторы;
- аналоговые вычислительные устройства;
- цифровые и аналоговые каналы связи.
Различные требования по стоимостным и техническим характеристикам, предъявляемые к УСД, определяют возможность вариации структуры УСД на основе выбора метода первичной обработки аналоговых сигналов.
Наиболее простая, но обеспечивающая относительно низкое качество преобразования является структура УСД показанная ниже.
Условно-последовательная структура УСД.
Эта конфигурация структуры рациональна при условии существования нормированных сигналов высокого уровня, поступающих со всех датчиков системы, этим обеспечивается необходимое качество преобразования и сохраняется достоинство по простоте реализации.
Последовательная структура УСД.
 |
Существуют сканирующие УСД, которые содержат один датчик, переключающие его с помощью сканирующего устройства на большое количество измеряемых точек (когда физическая природа измеряемого параметра одинакова). Функцию сканирующего устройства может выполнять аналоговый мультиплексор.
Параллельно-последовательная архитектура УСД.
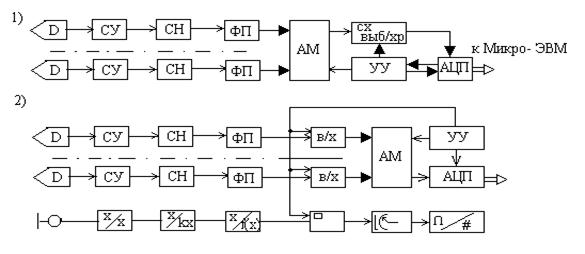 |
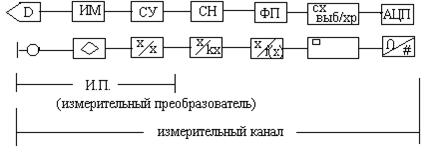
Высокие технические характеристики свойственны структурам
Параллельно-последовательной архитектуры:
ФП – функциональный преобразователь;
СН – схема нормализации.
Высокие качественные показатели обеспечиваются включением функциональных блоков: согласующее устройство, схема нормализации, функциональный преобразователь, схема выборки/хранения. Производительность этих схем находится в прямой зависимости от производительности (быстродействия) АЦП, поэтому в подобных системах необходимо применять АЦП с максимальным быстродействием. Характеристики систем 1) и 2) практически идентичны. Аппаратурные затраты для реализации канала сбора на основе структуры 1) несколько меньше (одна схема выборки /хранения). Конфигурацию 2) наиболее рационально использовать для преобразования однократных событий. Структура УСД, реализующая принцип параллельной обработки аналоговых сигналов, поступающих от датчиков, показана ниже.
 |
Данная структура позволяет обеспечить максимальную производительность аппаратуры для всех каналов УСД (из-за независимости обработки каждого сигнала) и высокое качество преобразования сигналов (вследствие отсутствия погрешностей, вносимых аналоговым мультиплексором). Предельно допустимое количество каналов УСД в данном случае ограничено только допустимым значением динамической погрешности преобразования измеряемых параметров.
 |
где Nс – предельно допустимое количество каналов;
 xi доп – допустимое значение динамической погрешности i -го
xi доп – допустимое значение динамической погрешности i -го  параметра;
параметра;
 – максимальное значение производной i -го параметра в диапазоне преобразования;
– максимальное значение производной i -го параметра в диапазоне преобразования;
tk – период коммутации.
Независимость отдельных ветвей при параллельной архитектуре УСД дает возможность просто (в структурном смысле) реализовать необходимые функциональные преобразования аналоговых сигналов и получить следующие преимущества:
а) устранение ошибок, возникающих при коммутации и выборке/хранения аналоговых сигналов, вносящих в основной вклад в суммарную погрешность преобразования;
б) значительно повышается помехозащищенность системы на основе использования цифровых каналов передачи данных на вход ЭВМ, если обеспечить преобразование сигналов непосредственно на выходе датчиков.
 |
Такой вариант построения системы имеет большое будущее, однако сейчас его применение ограничивается высокой стоимостью (и другими характеристиками) интегрального исполнения структуры УСД (в большей степени это относится к АЦП).
Для схем с одним АЦП число каналов в значительной мере ограничивается большим временем цикла преобразования АЦП – tацп.
Итак предметом нашего изучения в курсе Системы реального времени в большей степени будут вопросы автоматизации сбора и первичной обработки измерительной информации, а предметом исследования будет являться структура:
Как правило, сам датчик обособляется и не входит в состав УСД. Многофункциональная микро-ЭВМ также выносится за пределы УСД, хотя в состав УСД может входить специализированный микропроцессор. Во многом уровень ИИС определяется уровнем применяемых датчиков и алгоритма сбора и обработки информации. Датчики поневоле отстают в развитии от стремительного развития вычислительной техники (микропроцессоров). Тот кто держит под своим контролем датчики определяет уровень системы.
В качестве сравнения прогресса вычислительной техники приведем следующий пример двадцатилетней давности (журнал Сайнтифик Америкен (декабрь 1982г.): «Если бы авиация в последние 25 лет развивалась столь же стремительно как и промышленность средств ВТ, то сейчас Боинг 747 стоил бы 500 долларов и совершал облет земного шара за 20 минут, затратив при этом 5 галлонов топлива.» (кстати, 1 жидкостный галлон равен приблизительно 3,8 литра).
Тема 1: Техника первичных измерительных преобразователей (датчиков).
В основе организации автоматической системы ввода данных лежит применение датчиков входной информации с электрическим выходом и последующим преобразованием электрического сигнала в цифровую форму. Так как основные характеристики датчиков являются определяющими для системы сбора данных и систем управления, работающих в реальном масштабе времени, то только они и представляют интерес.
В настоящее время существует примерно следующее распределение доли различных физических величин, измеряемых в промышленности: температура( ) – 50%, расход (массовый, объемный)(
) – 50%, расход (массовый, объемный)( ) –15%, давление (Р) – 10%, уровень – 5%, количество (массовый, объемный)(V) – 5%, время(t) – 4%, электрические и магнитные величины (ЭМ) - менее 5%.
) –15%, давление (Р) – 10%, уровень – 5%, количество (массовый, объемный)(V) – 5%, время(t) – 4%, электрические и магнитные величины (ЭМ) - менее 5%.
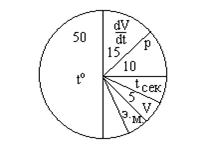 |
Отсюда видно,что подавляющее число измерений представляет собой измерения неэлектрических величин. При этом представляет интерес также абсолютный объем выполняемых измерений. Так на атомной электростанции среднего размера имеется около 3000 точек измерений различных физических величин. На крупном предприятии химической промышленности только для измерения температур имеется около 2000 точек измерений. Космическая система Шаттл – 300000 датчиков.
Таким образом основную долю составляют измерения неэлектрических величин, которые с помощью множества физических явлений и эффектов, могут быть преобразованы в электрические.
Физические явления и преобразования энергии на их основе.
| Эффект,явление,св-во. | Физическая сущность преобразования. |
 Теплопрводность (тепловая энергия Теплопрводность (тепловая энергия  физ. св- ва) физ. св- ва)  Тепловое излучение (тепловая инфра-красное излучение) Тепловое излучение (тепловая инфра-красное излучение)  Эффект Зеебека (1870-1831 нем) (тем-ра электрич-во) Эффект Зеебека (1870-1831 нем) (тем-ра электрич-во)  Эффект Пелтье (1748-1845 нем.) (Э тепловая энергия) Эффект Пелтье (1748-1845 нем.) (Э тепловая энергия)  Пироэлектрический эф-т (тем-ра электр-во) Пироэлектрический эф-т (тем-ра электр-во)  Термоэлектронный эф-т (тепловая эн-я эл-во) Термоэлектронный эф-т (тепловая эн-я эл-во)  Эффект Томсона (1824-1907 англ) (тем-ра теплов.эн-я) Эффект Томсона (1824-1907 англ) (тем-ра теплов.эн-я)  | Переход теплоты внутри физического объекта из области с более высокой в область более низкой температуры. Оптическое излучение при повышении температуры объекта. Возникновение ЭДС в цепи с биметаллическими соединениями при разной температуре спаев. На ЭЗ реализованы термопары. Поглощение или генерация тепловой энергии при электрическом токе в цепи с биметаллическим соединением (один нагревается, др.охлаждается). На ЭП работают малогабаритные холодильники. Возникновение электрических зарядов на гранях некоторых кристаллов при повышении температуры. Испускание электронов при нагревании металла в вакууме. Генерация или поглощение (в зависимости от направления тока) тепловой энергии в электрической цепи из однородного материала при различных температурах участков цепи (открыт в 1856 году) |
Фотогальванический эффект (свет - электричество)  Эф-т фотопроводимости (свет - Эф-т фотопроводимости (свет -  сопротивление) сопротивление)  Эффект Зеемана(1865-1943 голланд). (свет, магнетизм - спектр) Эффект Зеемана(1865-1943 голланд). (свет, магнетизм - спектр)  Эффект Римана (свет свет) Эффект Римана (свет свет)  Эффект Поккельса (нем.) Эффект Поккельса (нем.)  Эффект Керра (1824-1907 Шотландия) Эффект Керра (1824-1907 Шотландия)  Эффект Фарадея (1791-1867 англ.) (свет Эффект Фарадея (1791-1867 англ.) (свет  магнетизм свет) магнетизм свет)  | Появление свободных электронов и положительных дырок (возникновение ЭДС) в облучаемом светом p-n переходе. Изменение электрического сопротивления полупроводника при его облучении светом. Расщепление спектральных линий при прохождении света в магнитном поле (используется в лазерах). (открыт в 1896 году) Возникновение в веществе светового излучения, отличного по спектру от исходного монохроматического. Появление электрических зарядов на гранях кристаллов при их деформациях – сжатии, растяжении (кристаллы нелинейны и лишены центра симметрии). Обратный ПЭ – деформации кристалла под воздействием внешнего электрического поля (открыт в 1884 году) Расщепление светового луча на поляризованный и неполяризованный в изотропном веществе с приложенным к нему электрическим напряжением в перпендикулярном лучу направлении. (использ. в системах управления световыми потоками с помощью элек-го поля, быстродействующие оптические затворы 10 нс – Керра, двойное преломление луча). Поворот плоскости поляризации линейно поляризованного светового луча, проходящего через парамагнитные вещества (вдоль магнитно силовых линий). |
Эффект Холла (1855-1938 америк) (магнит.+ Э Э)  Магнитосопротивление (магнетизм сопр-е) Магнитосопротивление (магнетизм сопр-е)  Магнитострикция Магнитострикция  | Возникновение разности потенциалов на гранях твердого тела при пропускании через него электрического тока и приложении магнитного поля перпендикулярно направлению электрического тока. Увеличение электрического сопротивления твердого тела в магнитном поле (обусловлено искривлением в магнитном поле траектории носителей заряда). Деформация ферромагнитного тела, помещенного в магнитное поле (магнит + лат.strictio – сжатие). Обратное по отношению к магнитострикции явление - эффект Виллари. |
Пьезоэлектрический эф-фект  Э Тензометрический эффект Э Тензометрический эффект  | Возникновение разности потенциалов на гранях сегнетоэлектрика, находящегося под давлением. Изменение электрического сопротивления проводника в результате его деформации. |
В соответствии с измеряемым параметром удобно разделить существующие датчики на группы:
- измерения температуры;
- параметров движения;
- измерения угловых и линейных величин;
- усилий, крутящихся моментов, давлений, напряжений.
В зависимости от требуемой точности измерения используют различные принципы построения преобразователей физических величин в электрические. Необходимость преобразования неэлектрической величины в электрическую обуславливается следующими достоинствами электрических измерений:
- электрические величины удобно передавать на расстояние, причем передача осуществляется с высокой скоростью;
- электрические величины универсальны в том смысле, что любые другие величины могут быть преобразованы в электрические и наоборот;
- электрические величины легко преобразуются в цифровой код;
- электрические измерения позволяют достигнуть высокой точности чувствительности и быстродействия средств измерений.
Однако среди датчиков далеко не все построены на основе прямого преобразования того или иного физического явления в электрические сигналы. Во многих датчиках необходимы еще дополнительные преобразования. Датчики подобного типа реализуют косвенное преобразование.