 2015-04-01
2015-04-01 2121
2121Для электромагнитов, время срабатывания которых должно отличаться от нормального (0,05…0,15) с в большую или меньшую сторону, необходимы специальные меры для обеспечения временных параметров. Эти меры могут быть направлены либо на изменение конструкции и параметров электромагнита, либо на применение схемных способов изменения времени срабатывания. В связи с этим, эти методы и получили название конструктивные или схемные методы.
9.6.1. Конструктивные методы уменьшения времени срабатывания.
Время трогания. Для уменьшения времени трогания конструктивным способом уменьшают вихревые токи в магнитопроводе, которые увеличивают время трогания, так как они демпфируют магнитный поток при его изменении. Для этого магнитопровод выполняют из магнитных материалов с высоким удельным электрическим сопротивлением. В массивных частях магнитопровода выполняют специальные прорези, пересекающие пути вихревых токов. Магнитопровод выполняют шихтованным из листов электротехнической стали.
Время движения. Для уменьшения времени движения стремятся уменьшить ход якоря, уменьшить массу якоря и связанных с ним подвижных частей. Уменьшают трение в осях или между подвижными и неподвижными деталями конструкции. Применяют вращение якоря на призме, а не в осях.
9.6.2. Схемные методы уменьшения времени срабатывания. В тех случаях, когда конструктивные метода малоэффективны или не применимы, используют схемные методы изменения временных параметров электромагнитов. Схемные методы воздействуют только на время трогания электромагнита через его параметры.
 Время трогания при срабатывании можно уменьшить, если одновременно с увеличением напряжения питания электромагнита ввести в цепь катушки добавочное сопротивление Rд такой величины, чтобы установившееся значение тока в
Время трогания при срабатывании можно уменьшить, если одновременно с увеличением напряжения питания электромагнита ввести в цепь катушки добавочное сопротивление Rд такой величины, чтобы установившееся значение тока в
Рис. 121. Схема №1 для ускорения обмотке электромагнита при этом не
срабатывания изменилось (рис. 121), т. е.
 . (308)
. (308)
Уменьшение времени трогания здесь получается за счет снижения постоянной времени, так как
 и
и  ,
,
где  . (309)
. (309)
Недостатком этой схемы является то, что эффект достигается за счет пропорционального увеличения мощности, теряемой в добавочном сопротивлении. В схеме на рис. 122 последовательно с обмоткой электромагнита включен добавочный резистор, шунтированный конденсатором.
Напряжение питания в этой схеме также увеличивается. Однако, добавочный резистор подбирается также как и в схеме рис. 121. Форсировка процесса срабатывания здесь получается за счет того, что в первый момент после подачи напряжения незаряженная емкость С создает дополнительный путь для тока. Поэтому, за счет тока зарядки конденсатора в обмотке электромагнита ток растет быстрее. Переходный процесс, до момента трогания якоря, в этом случае описывается следующими уравнениями
 ,
,  ,
,  . (310)
. (310)
 Чтобы этот процесс имел апериодический, а не колебательный характер, необходимо соблюдение условия, вытекающего из решения этих уравнений
Чтобы этот процесс имел апериодический, а не колебательный характер, необходимо соблюдение условия, вытекающего из решения этих уравнений
 . (311)
. (311)
Для рассматриваемой схемы существует
Рис. 122. Схема № 2 для значение оптимальной емкости, при которой ускорения срабатывания время срабатывания получается минималь-
ным
 . (312)
. (312)
Недостатком этой схемы является наличие конденсатора, емкость которого обычно значительна.
 |
На рис. 123 показана схема форсировки срабатывания, в которую последовательно с обмоткой электромагнита включено добавочное сопротивление, шунтированное размыкающим контактом. Этот контакт связан с якорем. При обесточенной обмотке он замкнут, размыкание происходит лишь в конце хода
Рис. 123. Схема №3 для якоря. В период срабатывания через об-
ускорения срабатывания мотку протекает переходный ток, установившееся значение которого было бы равно  . Но благодаря тому, что якорь притягивается, происходит размыкание контакта К, шунтирующего Rд, и ток нарастает до меньшего установившегося значения, равного
. Но благодаря тому, что якорь притягивается, происходит размыкание контакта К, шунтирующего Rд, и ток нарастает до меньшего установившегося значения, равного  , который должен быть достаточным для удержания якоря электромагнита в притянутом положении. Эта схема может применяться также для уменьшения размеров электромагнита в тех установках, где особенно важно получить их минимальный вес.
, который должен быть достаточным для удержания якоря электромагнита в притянутом положении. Эта схема может применяться также для уменьшения размеров электромагнита в тех установках, где особенно важно получить их минимальный вес.
Недостатком схемы является наличие размыкающего контакта.
9.6.3. Мтоды увеличения времени срабатывания. Для увеличения времени срабатывания электромагнитов используют все общие факторы, приводящие к увеличению, как времени трогания, так и времени движения. Среди этих методов могут быть как конструктивные, так и схемные методы.
Из конструктивных методов, приводящих к увеличению времени движения, используются следующие факторы: увеличение хода якоря, увеличение веса подвижных частей, мехенические и электромагнитные демпферы. Последние нашли применение в реле, создающих большие выдержки времени, например, реле времени.
 В случае электромагнитного демпфирования применяют короткозамкнутые обмотки в виде медных (алюминиевых) гильз, надетых на сердечник магнитопровода (рис. 124). Вихревые токи, появляющиеся в этих гильзахв момент замыкания или размыкания основной обмотки электромагнита, задерживают изменение магнитного потока и создают замедление срабатывания, как при притяжении, так и при отпускании
В случае электромагнитного демпфирования применяют короткозамкнутые обмотки в виде медных (алюминиевых) гильз, надетых на сердечник магнитопровода (рис. 124). Вихревые токи, появляющиеся в этих гильзахв момент замыкания или размыкания основной обмотки электромагнита, задерживают изменение магнитного потока и создают замедление срабатывания, как при притяжении, так и при отпускании
Рис. 124. Магнитное якоря. В последнем случае достигается больший
 демпфирование замедляющий эффект, так как при отключении обмотки переходный процесс происходит при притянутом якоре, когда индуктивность системы большая. Поэтому, выдержка времени при отпускании якоря в электромагнитах с короткозамкнутыми гильзами может быть получена больше, чем при его притяжении. Характер изменения магнитных потоков
демпфирование замедляющий эффект, так как при отключении обмотки переходный процесс происходит при притянутом якоре, когда индуктивность системы большая. Поэтому, выдержка времени при отпускании якоря в электромагнитах с короткозамкнутыми гильзами может быть получена больше, чем при его притяжении. Характер изменения магнитных потоков
Рис. 125. Переходный процесс в ЭМ в магнитопроводе реле с
при магнитном демпфировании электромагнитным демпфером при включении и отключении приведены на рис. 125, а и б. При включении электромагнита уравнения, описывающие переходный процесс, имеют вид
 (313)
(313)
где  .
.
Решением этой системы уравнений будет
 . (314)
. (314)
Если связь между потоком и намагничивающей силой обмотки задана в графической форме в виде кривой намагничивания электромагнита, то время трогания может быть найдено методом графического интегрирования.
Электромагниты с электромагнитным демпфером могут обеспечивать выдержку времени при отпускании до 8…10 с.
Для изменения времени срабатывания электромагнитов схемными методами, следующие являются наиболее распространенными.
 В тех случаях, когда напряжение питания фиксировано, время трогания при включении может быть увеличено включением добавочного сопротивления Rд последовательно с обмоткой электромагнита (рис. 126). Увеличение времени трогания здесь получается вследствие уменьшения установившегося значения тока в цепи. Вместо резистора можно включить также индуктивность, что увеличивает постоянную
В тех случаях, когда напряжение питания фиксировано, время трогания при включении может быть увеличено включением добавочного сопротивления Rд последовательно с обмоткой электромагнита (рис. 126). Увеличение времени трогания здесь получается вследствие уменьшения установившегося значения тока в цепи. Вместо резистора можно включить также индуктивность, что увеличивает постоянную
Рис. 126. Схема для замедления времени цепи, не изменяя установивше-
срабатывания гося тока.
Для увеличения времени трогания при отключении применяются схемы, приведенные на рис. 127.
а б в
Рис. 127. Схемы для увеличения времени отпускания
Увеличение времени трогания в этих схемах получается за счет того, что после размыкания цепи в контурах (R,L - Rш), (R,L - VD) (рис. 127, а и б), возникающая в катушке ЭДС самоиндукции, создает ток, который тормозит спадание магнитного потока в электромагните. Задержка времени трогания определяется временем затухания тока в контурах, которое зависит от параметров этих контуров.
В схеме рис. 127, в задержка времени трогания при отпускании происходит за счет того, что после размыкания цепи заряженная емкость С разряжается в контуре (C,Rш - R,L) и ток разряда задерживает спадание потока в электромагните.
Вопросы для самоконтроля
9.7.1. Объясните характер зависимости тока в катушке электромагнита при срабатывании.
9.7.2. Как определяется время трогания электромагнита постоянного тока?
9.7.3. Какие факторы влияют на время движения электромагнита?
9.7.4. Конструктивные методы ускорения срабатывания электромагнитов.
9.7.5. Схемные методы ускорения срабатывния электромагнитов постоянного тока.
9.7.6. Принцип действия магнитного демпфирования.
9.7.7. Схемные методы увеличения времени срабатывания электромагнитов.
9.7.8. Какие факторы влияют на время трогания электромагнита постоянного тока?
9.7.9. Как изменится время срабатывания электромагнита с магнитным демпфером из алюминия, если последний заменить на медный?
9.7.10. Конструктивные способы уменьшения времени трогания электромагнита постоянного тока.
9.8. Примеры расчета [6]
9.8.1. Для броневого электромагнита, изображенного на рис. 104, определить время трогания.
Дано: число витков обмотки w = 2420; сопротивление обмотки R = 22 Ом; напряжение питания U = 36 В; длина катушки lк = 8,8∙10-2 м; длина стопа lс = 4,2∙10-2 м. При начальном зазоре δ н = 1∙10-2 м длина якоря lя = 3,6∙10-2 м, а проводимость рабочего зазора Gδн = 19,8∙10-8 Гн; удельная проводимость рассеяния gσ = 9∙10-6 Гн/м; конечный зазор δк = 0,1∙10-2 м. Противодействующая сила при начальном зазоре Fпн = 23 Н.
Решение. Эквивалентная проводимость при начальном зазоре равна
 Гн.
Гн.
Индуктивность обмотки при начальном зазоре
 Гн.
Гн.
Ток трогания
 А.
А.
Установившийся ток  А.
А.
Коэффициент запаса  .
.
Время трогания
 с.
с.
9.8.2. Для броневого электромагнита, эскиз которого приведен на рис. 104, тяговая и механическая характеристики показаны на рис. 128, а время трогания tтр = 27,4∙10-3 с, определить время срабатывания, если масса его подвижных частей равна m = 0,8 кг.
Решение. По графикам рис. 128, используя метод планиметрирования, определяем площадь  м2
м2
(масштабы: mδ = 0.22 м/м, mF = 104 Н/м).
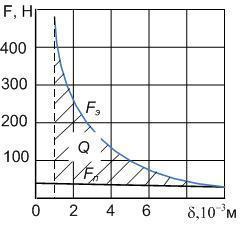 Среднее значение разности сил определим по формуле:
Среднее значение разности сил определим по формуле:
 Время движения
Время движения  Рис. 128. К расчету tср
Рис. 128. К расчету tср
Время срабатывания
 с.
с.
9.8.3. Определить пределы изменения времени трогания электромагнита с форсировкой, использующего последовательное добавочное сопротивление, шунтированное размыкающим контактом (рис. 123). Коэффициент форсировки KF = 3.
Решение. Возможные пределы ускорения срабатывания определяем по формуле:
 .
.
9.8.4. Определить время отпускания клапанного электромагнита постоянного тока, включенного по мостовой схеме выпрямления на напряжении U = 36 В переменного тока. Число витков обмотки w = 5000; сопротивление R = 480 Ом; напряжение отпускания Uотп = 8 В; длина сердечника lc = 17∙10-3 м; эквивалентная магнитная проводимость системы при притянутом якоре GмΣ = 25∙10-8 Гн; удельное электрическое сопротивление стали ρст = 13∙10-8 Ом∙м.
Решение. Определим ток обмотки
 А.
А.
Ток отпускания
 А.
А.
Индуктивность
 Гн.
Гн.
Время отпускания
 с.
с.
СПИСОК ЛИТЕРАТУРЫ
1. Чунихин А.А. Электрические аппараты. Общий курс. – М.:
Альянс, 2008. – 720 с.
2. Электрические и электронные аппараты: Учебник для вузов/ Под ред. Ю.К. Розанова. – М.: Информэлектро. 2001. – 420 с.
3. Родштейн Л.А. Электрические аппараты. – Л.: Энергоиздат, 1981. – 304 с.
4. Таев И.С. Электрические аппараты управления. – М.: Высш. шк., 1984. -247 с.
5. Буль Б.К., Буль О.Б. и др. Электромеханические аппараты автоматики. – М.: Высш. шк., 1988. -304 с.
6. Буткевич Г.В., Дегтярь В.Г., Сливинская А.Г. Задачник по электрическим аппаратам. – М.: Высш. Шк., 1987. – 232 с.
7. Сахаров П.В. Проектирование электрических аппаратов. – М.: Энергия, 1971. – 560 с.
Составитель: Роберт Яковлевич Кляйн
ЭЛЕКТРИЧЕСКИЕ И ЭЛЕКТРОННЫЕ АППАРАТЫ
Часть I








