 2015-04-06
2015-04-06 660
660Простейшая система автоматического регулирования с обратной связью показана на рис. 5.34. В ней блок  называют регулятором (от слова Regulator),
называют регулятором (от слова Regulator),  - объектом регулирования (от слова Process), r - управляющим воздействием или уставкой (reference), e - сигналом рассогласования или ошибки (error), u - выходной величиной регулятора, y - регулируемой величиной.
- объектом регулирования (от слова Process), r - управляющим воздействием или уставкой (reference), e - сигналом рассогласования или ошибки (error), u - выходной величиной регулятора, y - регулируемой величиной.
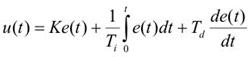
Если выходная переменная u регулятора описывается выражением
 , ,
| (5.36) |
где  -время;
-время;  - пропорциональный коэффициент (безразмерный), постоянная интегрирования (размерность времени) ипостоянная дифференцирования (размерность времени) регулятора, то такой регулятор называют ПИД-регулятором.
- пропорциональный коэффициент (безразмерный), постоянная интегрирования (размерность времени) ипостоянная дифференцирования (размерность времени) регулятора, то такой регулятор называют ПИД-регулятором.

| |
| Рис. 5.34. ПИД-регулятор в системе с обратной связ |
17. Передаточная функция ПИД-регулятора имеет вид
 . .
|








