2015-04-06
2015-04-06 1992
1992ПИД-регулятор и его модификации являются теоретическими идеализациями реальных регуляторов, поэтому для их практического воплощения необходимо учесть особенности, порождаемые реальными условиями применения и технической реализации. К таким особенностям относятся:
o конечный динамический диапазон изменений физических переменных в системе (например, ограниченная мощность нагревателя, ограниченная пропускная способность клапана);
o отсутствие (как правило) в системе поддержания температуры холодильника (управляющее воздействие  соответствует включению холодильника, а не выключению нагревателя);
соответствует включению холодильника, а не выключению нагревателя);
o ограниченная точность измерений, что требует специальных мер для выполнения операций дифференцирования с приемлемой погрешностью;
o наличие практически во всех системах типовых нелинейностей: насыщение (ограничение динамического диапазона изменения переменных), ограничение скорости нарастания, гистерезис и люфт;
o технологический разброс и случайные вариации параметров регулятора и объекта;
o дискретная реализация регулятора;
o необходимость плавного (безударного) переключение режимов регулирования.
Погрешность дифференцирования и шум:
Проблема численного дифференцирования является достаточно старой и общей как в цифровых, так и в аналоговых регуляторах. Суть ее заключается в том, что производная вычисляется обычно как разность двух близких по величине значений функции, поэтому относительная погрешность производной всегда оказывается больше, чем относительная погрешность численного представления дифференцируемой функции.
В частности, если на вход дифференциатора поступает синусоидальный сигнал  , то на выходе получим
, то на выходе получим  , т.е. с ростом частоты
, т.е. с ростом частоты  увеличивается амплитуда сигнала на выходе дифференциатора. Иначе говоря, дифференциатор усиливает высокочастотные помехи, короткие выбросы и шум.
увеличивается амплитуда сигнала на выходе дифференциатора. Иначе говоря, дифференциатор усиливает высокочастотные помехи, короткие выбросы и шум.
Если помехи, усиленные дифференциатором, лежат за границей рабочих частот ПИД-регулятора, то их можно ослабить с помощью фильтра верхних частот. Структурная реализация дифференциатора с фильтром показана на рис. 5.66.
 |
| Рис. 5.66. Структурная реализация дифференциального члена ПИД-регулятора |
Здесь  ,
,
т.е. передаточная функция полученного дифференциатора  может быть представлена в виде произведения передаточной функции идеального дифференциатора на передаточную функцию фильтра первого порядка:
может быть представлена в виде произведения передаточной функции идеального дифференциатора на передаточную функцию фильтра первого порядка:  , где коэффициент
, где коэффициент  задает граничную частоту фильтра и обычно выбирается равным 2...20.
задает граничную частоту фильтра и обычно выбирается равным 2...20.
Большее ослабление высокочастотных шумов можно получить с помощью отдельного фильтра, который включается последовательно с ПИД-регулятором. Обычно используют фильтр второго порядка с передаточной функцией  .
.
Постоянную времени фильтра обычно выбирают равной  , где =2...20. Граничную частоту фильтра желательно не выбирать ниже частоты
, где =2...20. Граничную частоту фильтра желательно не выбирать ниже частоты  , т.к. это усложняет расчет параметров регулятора и запаса устойчивости.
, т.к. это усложняет расчет параметров регулятора и запаса устойчивости.
Кроме шумов дифференцирования на характеристики ПИД-регулятора влияют шумы измерений. Через цепь обратной связи эти шумы поступают на вход системы и затем проявляются как дисперсия управляющей переменной  . Высокочастотные шумы вредны тем, что вызывают ускоренный износ трубопроводной арматуры и электродвигателей.
. Высокочастотные шумы вредны тем, что вызывают ускоренный износ трубопроводной арматуры и электродвигателей.
Поскольку объект управления обычно является низкочастотным фильтром, шумы измерений редко проникают по контуру регулирования на выход системы. Однако они увеличивают погрешность измерений  и снижают точность регулирования.
и снижают точность регулирования.
В ПИД регуляторах различают шум с низкочастотным спектром, вызванный внешними воздействиями на объект управления, и высокочастотный шум, связанный с электромагнитными наводками, помехами по шинам питания и земли, с дискретизацией измеряемого сигнала и другими причинами. Низкочастотный шум моделируют как внешние возмущения ( ), высокочастотный - как шумы измерений (
), высокочастотный - как шумы измерений ( ).
).
Интегральное насыщение
В установившемся режиме работы и при малых возмущениях большинство систем с ПИД-регуляторами являются линейными. Однако процесс выхода на режим практически всегда требует учета нелинейности типа "ограничение". Эта нелинейность связана с естественными ограничениями на мощность, скорость, частоту вращения, угол поворота, площадь поперечного сечения клапана, динамический диапазон, и т. п. Контур регулирования в системе, находящейся в насыщении (когда переменная достигла ограничения), оказывается разомкнутым, поскольку при изменении переменной на входе звена с ограничением его выходная переменная остается без изменений.
Наиболее типовым проявлением режима ограничения является так называемое "интегральное насыщение", которое возникает в процессе выхода системы на режим в регуляторах с ненулевой постоянной интегрирования  . Интегральное насыщение приводит к затягиванию переходного процесса (рис. 5.67 - рис. 5.68).
. Интегральное насыщение приводит к затягиванию переходного процесса (рис. 5.67 - рис. 5.68).
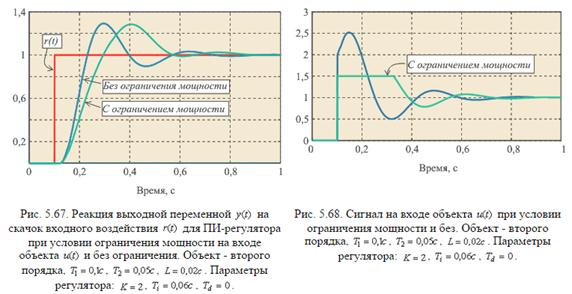
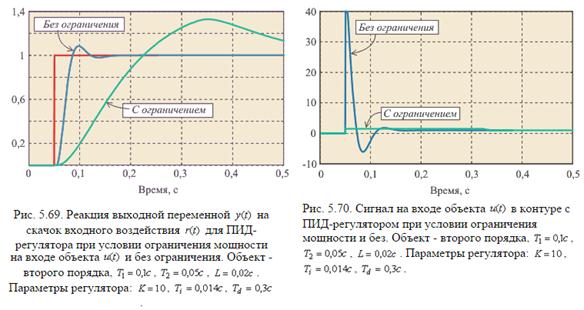
Аналогичный эффект возникает вследствие ограничения пропорционального и интегрального члена ПИД-регулятора (рис. 5.69 - рис. 5.70). Однако часто под интегральным насыщением понимают совокупность эффектов, связанных с нелинейностью типа "ограничение".
Суть проблемы интегрального насыщения состоит в том, что если сигнал на входе объекта управления  вошел в зону насыщения (ограничения), а сигнал рассогласования
вошел в зону насыщения (ограничения), а сигнал рассогласования  не равен нулю, интегратор продолжает интегрировать т. е. сигнал на его выходе растет, но этот сигнал не участвует в процессе регулирования и не воздействует на объект вследствие эффекта насыщения. Система управления в этом случае становится эквивалентной разомкнутой системе, сигнал на входе которой равен уровню насыщения управляющего сигнала .
не равен нулю, интегратор продолжает интегрировать т. е. сигнал на его выходе растет, но этот сигнал не участвует в процессе регулирования и не воздействует на объект вследствие эффекта насыщения. Система управления в этом случае становится эквивалентной разомкнутой системе, сигнал на входе которой равен уровню насыщения управляющего сигнала .
Для тепловых систем ограничением снизу обычно является нулевая мощность нагрева, в то время как ПИД-регулятор требует подачи на объект "отрицательной мощности нагрева", т.е. требует охлаждения объекта.
Эффект интегрального насыщения известен давно. В аналоговых регуляторах его устранение было достаточно проблематичным, поскольку в них проблема не могла быть решена алгоритмически, а только аппаратными средствами. С появлением микропроцессоров проблему удается решить гораздо эффективнее. Методы устранения интегрального насыщения обычно являются предметом изобретений, относятся к коммерческой тайне фирм-производителей и защищаются патентами. Ниже рассмотрены несколько таких идей, описанных в литературе.
Ограничение скорости нарастания входного воздействия
Поскольку максимальное значение входного воздействия на объект управления снижается с уменьшением разности  , то для устранения эффекта ограничения можно просто снизить скорость нарастания сигнала уставки
, то для устранения эффекта ограничения можно просто снизить скорость нарастания сигнала уставки  , например, с помощью фильтра. Недостатком такого способа является снижение быстродействия системы, а также невозможность устранить интегральное насыщение, вызванное внешними возмущениями, а не сигналом уставки.
, например, с помощью фильтра. Недостатком такого способа является снижение быстродействия системы, а также невозможность устранить интегральное насыщение, вызванное внешними возмущениями, а не сигналом уставки.
Алгоритмический запрет интегрирования
Когда управляющее воздействие на объект достигает насыщения, обратная связь разрывается и интегральная составляющая продолжает расти, даже если при отсутствии насыщения она должна была бы падать. Поэтому один из методов устранения интегрального насыщения состоит в том, что контроллер следит за величиной управляющего воздействия на объект, и как только оно достигает насыщения, контроллер вводит программный запрет интегрирования для интегральной составляющей.
Компенсация насыщения с помощью дополнительной обратной связи
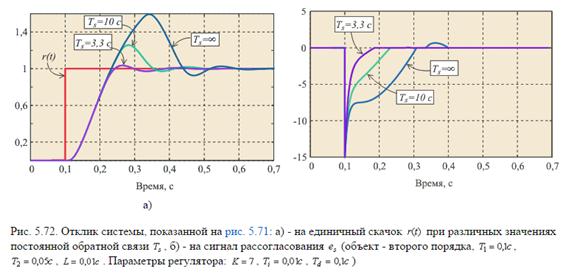
Эффект интегрального насыщения можно ослабить, отслеживая состояние исполнительного устройства, входящего в насыщение, и компенсируя сигнал, подаваемый на вход интегратора. Структура системы с таким компенсатором показана нарис. 5.71.
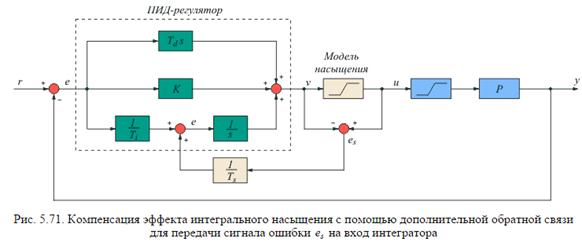
Принцип ее работы состоит в следующем. В системе вырабатывается сигнал рассогласования между входом и выходом исполнительного устройства  . Сигнал на выходе исполнительного устройства либо измеряют, либо вычисляют, используя математическую модель (рис. 5.71). Если
. Сигнал на выходе исполнительного устройства либо измеряют, либо вычисляют, используя математическую модель (рис. 5.71). Если  , это эквивалентно отсутствию компенсатора и получаем обычный ПИД-регулятор. Если же исполнительное устройство входит в насыщение, то
, это эквивалентно отсутствию компенсатора и получаем обычный ПИД-регулятор. Если же исполнительное устройство входит в насыщение, то  и
и  . При этом сигнал на входе интегратора уменьшается на величину ошибки
. При этом сигнал на входе интегратора уменьшается на величину ошибки  , что приводит к замедлению роста сигнала на выходе интегратора, уменьшению сигнала рассогласования и величины выброса на переходной характеристике системы (рис. 5.72). Постоянная времени
, что приводит к замедлению роста сигнала на выходе интегратора, уменьшению сигнала рассогласования и величины выброса на переходной характеристике системы (рис. 5.72). Постоянная времени  определяет степень компенсации сигнала рассогласования (рис. 5.72).
определяет степень компенсации сигнала рассогласования (рис. 5.72).
В некоторых регуляторах вход устройства сравнения выделяют как отдельный вход, называемый "вход слежения", что бывает удобно при построении сложных систем управления и при каскадном соединении нескольких регуляторов.
Условное интегрирование
Этот способ является обобщением алгоритмического запрета интегрирования. После наступления запрета интегральная составляющая остается постоянной, на том же уровне, который она имела в момент появления запрета интегрирования. Обобщение состоит в том, что запрет интегрирования наступает не только при достижении насыщения, но и при некоторых других условиях.
Такими условиями могут быть, например, достижение сигналом ошибки  или выходной переменной
или выходной переменной  некоторого заданного значения. При выключении процесса интегрирования нужно следить, в каком состоянии в момент выключения находится интегратор. Если он накапливает ошибку и степень насыщения возрастает, то интегрирование выключают. Если же в момент выключения степень насыщения понижается, то интегратор оставляют включенным.
некоторого заданного значения. При выключении процесса интегрирования нужно следить, в каком состоянии в момент выключения находится интегратор. Если он накапливает ошибку и степень насыщения возрастает, то интегрирование выключают. Если же в момент выключения степень насыщения понижается, то интегратор оставляют включенным.
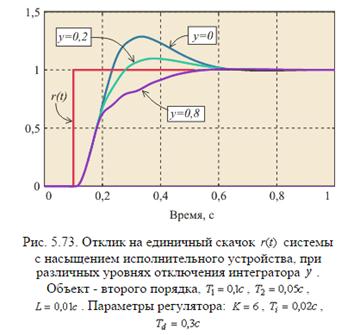
На рис. 5.73 показан пример переходного процесса в системе с отключением интегратора при достижении выходной величины заданного значения ( ,
,  ,
,  ).
).
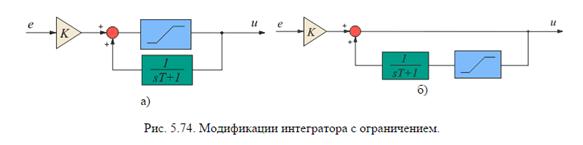
Интегратор с ограничением
Если схему реализации ПИ-регулятора с помощью интегратора в цепи обратной связи дополнить ограничителем (рис. 5.74-а), то сигнал  на выходе никогда не выйдет за границы, установленные порогами ограничителя, что уменьшает выброс на переходной характеристике системы (рис. 5.75).
на выходе никогда не выйдет за границы, установленные порогами ограничителя, что уменьшает выброс на переходной характеристике системы (рис. 5.75).
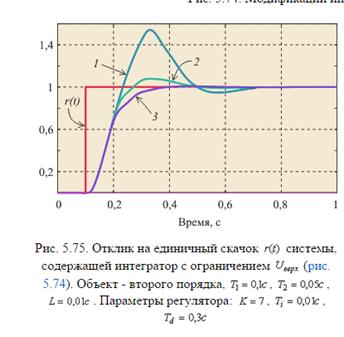
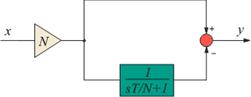
На рис. 5.74,б представлена модификация такого ограничителя.
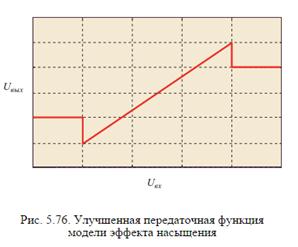
Модель эффекта ограничения можно улучшить, если после превышении уровня, при котором наступает ограничение, уменьшить сигнал на выходе модели (рис. 5.76). Это ускоряет выход системы из режима насыщения.