 2015-05-06
2015-05-06 1348
1348Динамический расчет начинают с составления расчетной динамической схемы машины и уравнений движения масс, входящих в эту схему. От реальной машины к расчетной динамической схеме переходят, пренебрегая теми физическими факторами, которые для конкретного расчетного режима имеют несущественное значение.
Выбор той или иной расчетной схемы определяется задачей расчета. В расчетных динамических схемах реальные параметры машин (масса, коэффициенты жесткости, податливости и т.п.), а также внешние нагрузки заменяют приведенными величинами для упрощения расчетных уравнений и соот ношений. Приведение параметров и нагрузок производят на основании равенства общей энергии приведенной системы. Приведение производится либо к поступательному движению, либо к вращательному движению одной из масс механизма.
Критерием достоверности принятой расчетной схемы является опыт, сравнение теоретического расчета с результатами эксперимента.
Приведенные силы определяют из условия равенства их работы сумме работ тех сил, которые они заменяют, т.е.
где  приведенная сила;
приведенная сила;  проекция действующей на i-e звено силы на направление движения центра масс этого звена;
проекция действующей на i-e звено силы на направление движения центра масс этого звена;  момент, действующий на i-e звено.
момент, действующий на i-e звено.
Из этого уравнения находим:
 (2.1)
(2.1)
Приведенная масса и приведенный момент инерции определяются из условия равенства кинетической энергии приведенной массы сумме кинетических энергий масс, которые она заменяет. Аналитически это правило выражается уравнениями:
где mпр и  Jпр -приведенная масса и приведенный момент инерции;
Jпр -приведенная масса и приведенный момент инерции;  и
и  -линейная и угловая скорости звена приведения; m i uJ i - масса и момент инерции i- го звена механизма;
-линейная и угловая скорости звена приведения; m i uJ i - масса и момент инерции i- го звена механизма;  и
и  -линейная и угловая скорости i -го звена механизма.
-линейная и угловая скорости i -го звена механизма.
Из этих уравнений находим
 (2.2)
(2.2)
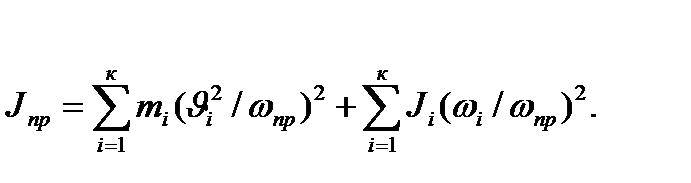 (2.3)
(2.3)
Приведение жесткостей выполняется так, чтобы потенциальная энергия приведенной системы равнялась потенциальной энергии реальной упругой системы.
Пусть имеется система из двух валов с жесткостью C1 и С2, соединенных между собой зубчатой передачей(рис. 2.1, a), которую требуется заменить системой с одним упругим элементом, имеющим приведенную жесткость Спр (рис.2.1, b), причем, жесткости следует привести к валу 1.
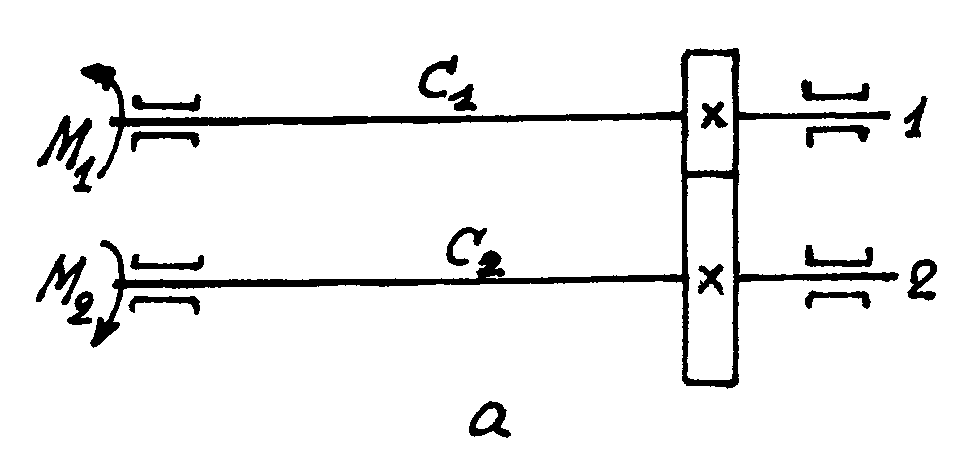
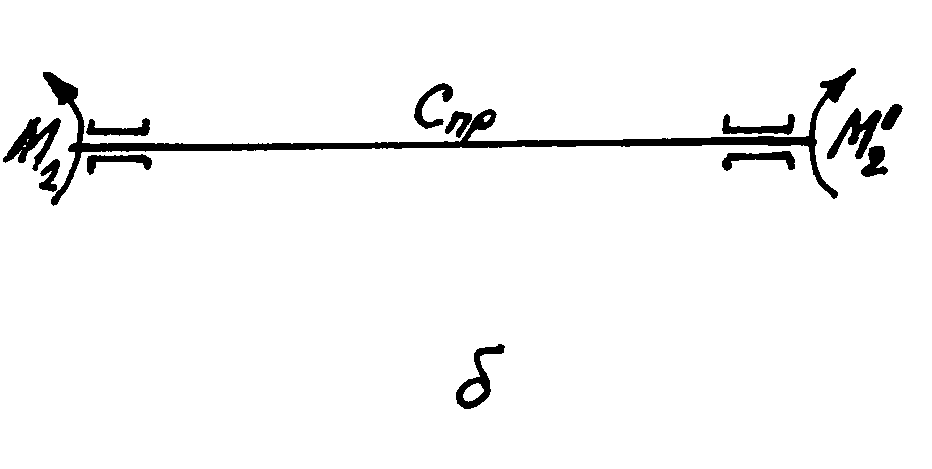
Рисунок 2.1 - Схема к приведению жесткостей двух валов с зубчатой передачей к жесткости одного вала
Если к валу 1 приложен момент M1, то момент, приложенный к валу 2, M2 = M1.U; в приведенной системе 
В нашем примере: потенциальная энергия реальной системы
П = М1.φ1 /2 + М2. φ 2 /2 = М1(φ 1 + φ 2.U) /2,
где φ1, φ2.- углы закручивания валов под действием приложенных к ним моментов, причем φ1 = M1/C1; φ2 = M2/C2; U - передаточное число зубчатой передачи.
Потенциальная энергия приведенной системы
П = М1. φ пр /2,
где φ пр - угол закручивания приведенной системы.
Приравнивая два выражения потенциальной энергии, получаем
φ пр = φ 1 + φ 2.U. (2.4)
Согласно определению, приведенная жесткость
Cпр= М1/ φ пр = М1/(φ 1 + φ 2.U).
Подставляя в это уравнение значения М1 = φ1.С1 и φ 2 = φ 1C1U/C2,
получаем 1/Cпр = 1/C1 + U2/C2 или Cпр = C1 . C2 / (С1U2 + C2). (2.5)
Основная литература [3, c. 319…325]
Дополнительная литература [10, c. 34…36]
Контрольные вопросы:
1. Сколько масс и какой способ соединения между ними должна содержать расчетная динамическая схема?
2. К какому виду движения одной из масс механизма производится приведение параметров машин и внешних нагрузок?
3. Приведите зависимости для определения приведенных сил, масс, моментов инерции и жесткостей.
Лекция 3

