 2015-05-06
2015-05-06 819
819(НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ)
Лабораторная работа
по курсу
«Динамика полёта»
Тема работы:
«Продольное короткопериодическое движение самолёта»
Студенты:
Брянский Ст.
Донченко В.
Рослов Н.
Преподаватель:
Елисеев В.Д.
Москва 2012
Тема: Продольное короткопериодическое движение самолёта.
Цели работы:
1. Изучить уравнения самолёта.
2. Составить структурную схему системы.
3. Проанализировать переходные функции самолёта, соответствие рассчитанным характеристикам управляемости. Объяснить, почему α стремится к αconst, почему процессы колебательны, почему начальная реакция по перегрузке обратная, как и почему растут Θ, θ, Н, каково перерегулирование по перегрузке.
4. Проанализировать параметры самолёта и характеристики управления, удовлетворяют ли они требованиям критериев управляемости.
1) Уравнения самолёта:






Где Θ – угол наклона траектории (град);
α – угол атаки (град);
δ – угол отклонения руля высоты (град);
ωz – угловая скорость вращения корпуса самолёта (град/с);
θ – угол тангажа (град);
Н – высота полёта (м);
V – скорость полёта (м/с);
ny – нормальная перегрузка.
Исходные данные для варианта:









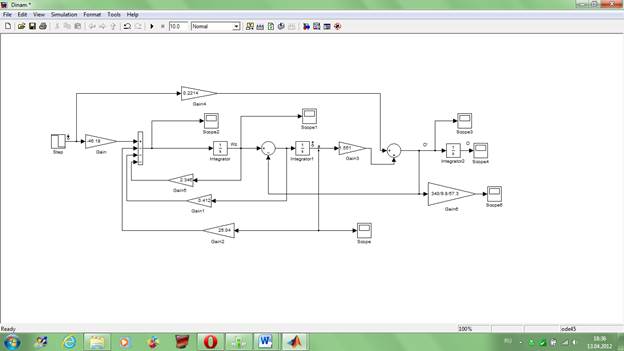
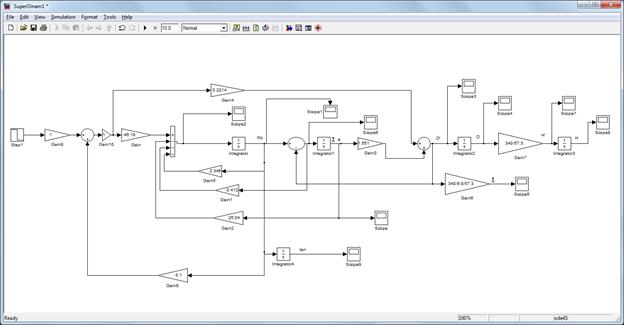
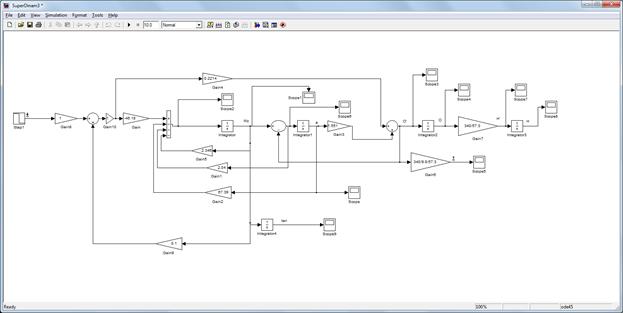
2) Структурная схема:
3) Анализ переходных функций
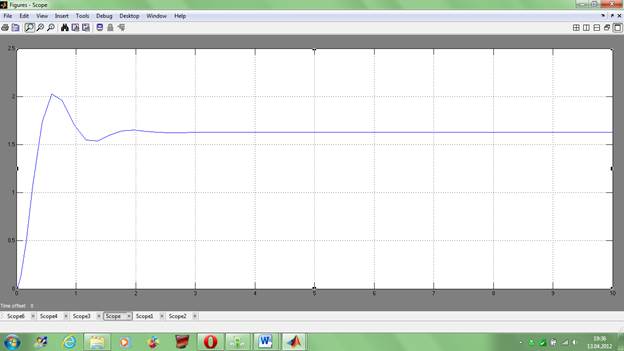
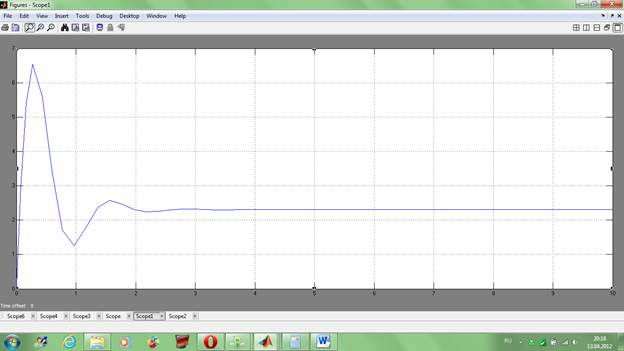
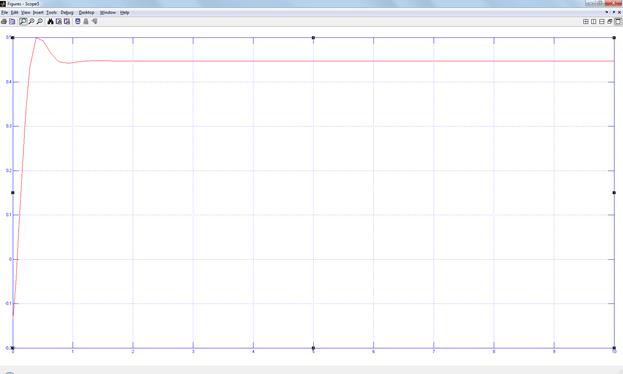
А) Угла атаки:
Расчётные значения:


Данные с графика:


Перерегулирование 25%, что примерно соответствует  0,4.
0,4.
Вывод: Расчетные и полученные графически данные совпадают. Процесс колебательный, так как передаточная функция  является передаточной функцией колебательного звена, α стремится к αconst равному 1,62.
является передаточной функцией колебательного звена, α стремится к αconst равному 1,62.
Б) Угловой скорости:
Расчетные значения:

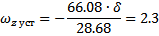
Данные графика:


Перерегулирование 183%
График углового ускорения:
Вывод: Расчетные и полученные графически данные совпадают. Процесс колебательный, так как передаточная функция  является передаточной функцией колебательного звена. Скорость ωz не приходит к нуля, так как момент образованный отклонением руля высоты не компенсирует моменты создаваемые установившимся углом атаки, и установившейся скоростью, следовательно угол тангажа продолжает меняться с определённой скоростью.
является передаточной функцией колебательного звена. Скорость ωz не приходит к нуля, так как момент образованный отклонением руля высоты не компенсирует моменты создаваемые установившимся углом атаки, и установившейся скоростью, следовательно угол тангажа продолжает меняться с определённой скоростью.
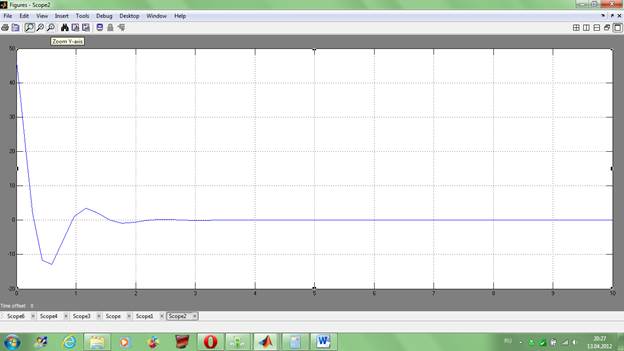
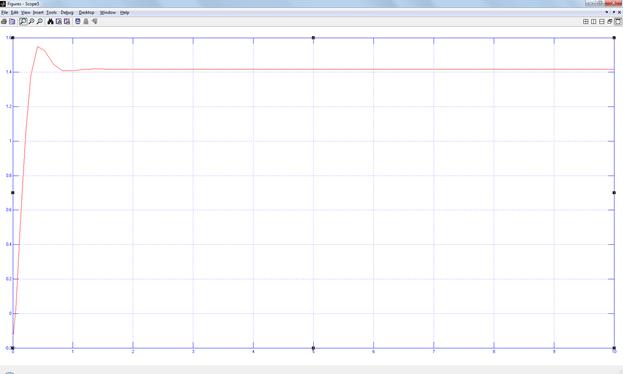
В) Перегрузка и угловая скорость наклона траектории:
Угловая скорость наклона:
Перегрузка:
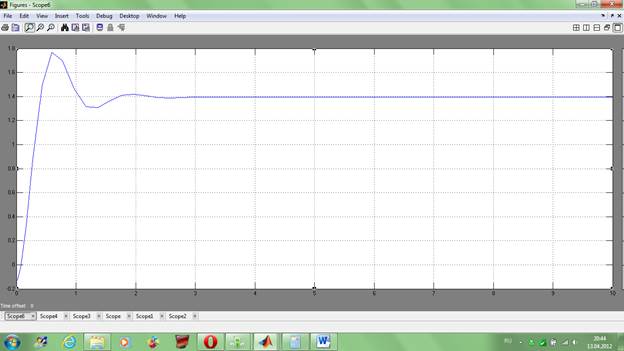
Расчетные значения:


Данные графика:

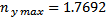
Перерегулирование 26%
Вывод: Расчетные и полученные графически данные совпадают. Процесс колебательный, так как передаточная функция  является передаточной функцией колебательного звена. Начальная реакция по перегрузке является обратной, так как коэффициент при старшей производной числителя передаточной функции отрицательный.
является передаточной функцией колебательного звена. Начальная реакция по перегрузке является обратной, так как коэффициент при старшей производной числителя передаточной функции отрицательный.
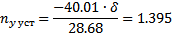
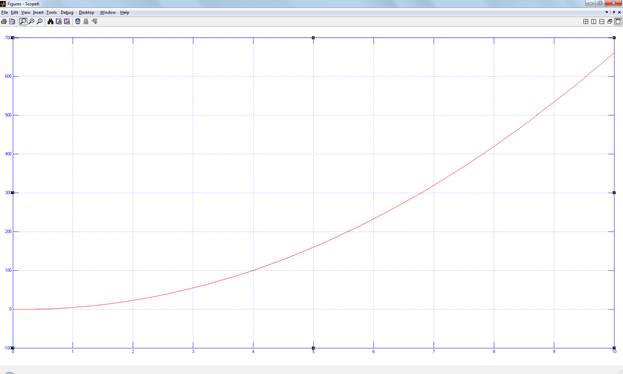
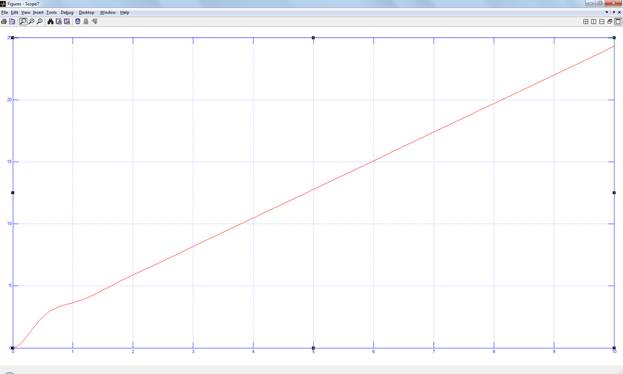
Г) Высота, угол наклона траектории, угол тангажа:
Как видно из прошлого раздела, скорость изменения угла траектории приходит к установившемуся значению. Следовательно (так как величина является интегралом её скорости) угол наклона траектории линейно возрастает:
В свою очередь, угол наклона траектории является скоростью изменения высоты, но с учетом коэффициента усиления V/57.3, поэтому как интеграл линейной функции высота возрастает по квадратичному закону.
Угловая скорость  является скоростью изменения угла тангажа и приходит к установившемуся значению, следовательно угол тангажа будет линейно возрастать:
является скоростью изменения угла тангажа и приходит к установившемуся значению, следовательно угол тангажа будет линейно возрастать:
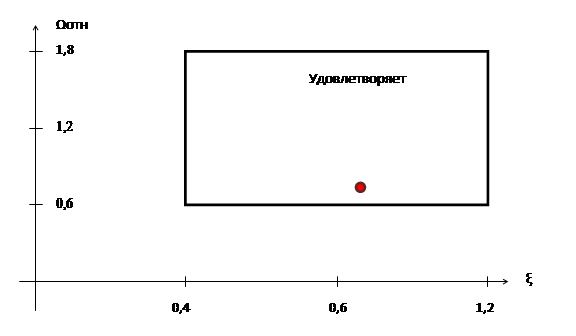
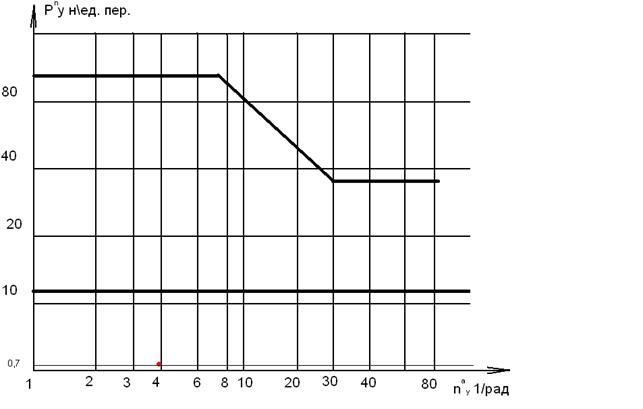
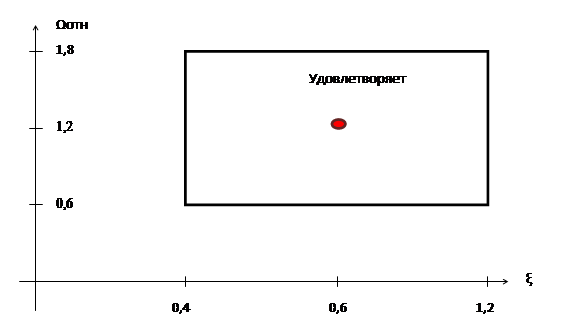
4) Проверка критерия динамической управляемости:
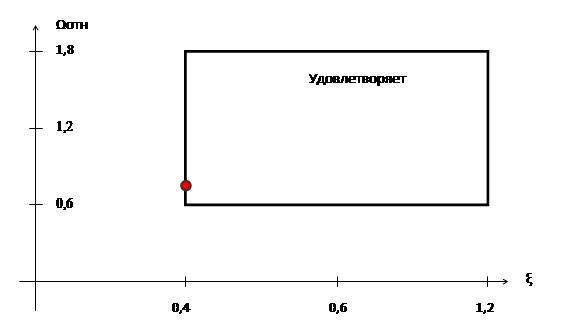




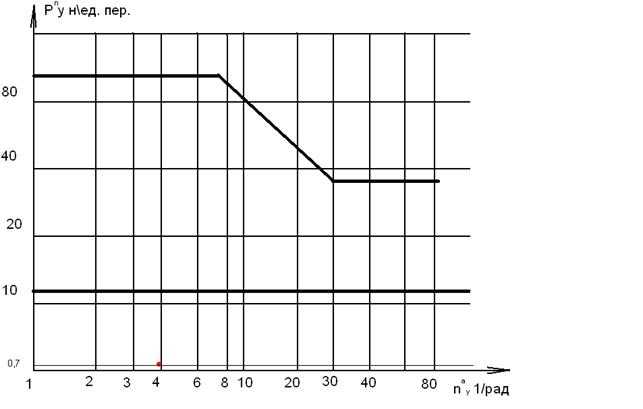
Вывод: Система не удовлетворяет критерию динамической управляемости.
Введём в Систему рулевой привод
Тогда передаточная функция пререгрузки от откланения рулей примет вид вид

Переходный процесс по перегрузке


Перерегулирование 3%
Проверка критерия динамической управляемости:


Найдём такие параметры коэффициенты для системы,при которых:


 =8.76
=8.76
Тогда знаменатель передаточной функции пререгрузки от откланения рулей примет вид:


 10,512
10,512
 76,73
76,73
Параметры удовлетворяющие этой системе уравнений






Введём параметры в систему управления
Переходной прочесс для перезрузки


Перерегулирование 11%


Вывод:
Были найдены коэфичиенты для системы управления ЛА при которых система управления вполне управляема








