 2015-04-30
2015-04-30 797
797Активный магнитный подшипник - это управляемое электромагнитное устройство, которое удерживает вращающуюся часть машины (ротор) в заданном положении относительно неподвижной части (статора). Магнитные силы притяжения, действующие на ротор со стороны электромагнитов, управляются с помощью электронной системы управления. Поэтому конструктивно АМП состоит из двух основных частей (рис 43)
- электромеханической части, или собственно, подшипника;
- электронной системы управления.
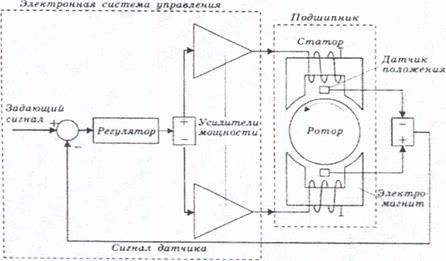 Рис. 43. Принцип действия АМП.
Рис. 43. Принцип действия АМП.
|
Подшипник включает в себя ротор, подвешенный в магнитном поле, закрепленные на статоре электромагниты и датчики положения ротора. Механический контакт между ротором и неподвижным статором отсутствует. Смещения ротора из заданного положения равновесия измеряются датчиками положения. Сигнал с датчиков обрабатывается электронной системой управления таким образом, что магнитные силы возвращают ротор в исходное положение. При отключенном подвесе, а также в случае аварийного сбоя в системе управления ротор опирается на страховочные (или аварийные) подшипники. Эти подшипники (чаще всего это шарикоподшипники) устанавливаются с зазором, поэтому в нормальном режиме они не вращаются.
Электронная система управления включает в себя регулятор и усилители мощности. Используя информацию, поступающую с датчиков положения, эта система управляет положением ротора путем изменения токов в электромагнитах. Соответствующий выбор закона управления токов позволяет обеспечить устойчивое положение ротора и его центровку в зазоре, а также получить желаемое значение жесткости демпфирования подвеса. Конструктивно электронная система управления оформляется в виде электронного блока, соединенного кабелями с подшипниками и источником питания.








