2015-05-10
2015-05-10 380
380В современном производстве происходят значительные изменения, отражающие революционные достижения в области электроники, механики, информатики. Серийное производство автоматических манипуляторов – промышленных роботов – освобождает человека от ручного низкоквалифицированного и монотонного труда, и в первую очередь в условиях, вредных для здоровья человека.
Тенденции развития робототехники, как одного из основных средств гибкого автоматизированного и автоматического производства, в настоящее время таковы, что преимущественное развитие должны получить промышленные роботы (ПР) для выполнения основных технологических процессов – сборки, сварки, зачистки заготовок и шлифования изделий, окраски, контроля и разбраковки.
Важную роль для перевода производства на новую ступень развития выполняет популяризация современных концепций построения будущих производственных систем, базирующихся на перспективных достижениях науки и техники.
Развитие средств автоматизации, использующих новейшие достижения информатики и вычислительной техники, автоматики и технической кибернетики, позволяет не только осуществить качественный скачок в создании перспективных технологий, но и перейти на более высокий уровень производственных отношений в народном хозяйстве.
Непременным условием успешного использования роботов в модернизируемых производствах является строгая технологическая дисциплина. Роботы во многом влияют на весь технологический цикл, а их функционирование, зависит от строгого соблюдения поставок и всего графика работы оборудования. И там, где этого нет, где не обеспечена технологическая дисциплина, отсутствует профилактика работы оборудования – роботы просто останавливают производственный процесс.
В промышленной робототехнике наибольший эффект, в ближайшей перспективе, может дать концентрированный переход к использованию роботов в качестве основного, а не вспомогательного технологического оборудования для выполнения таких операций, как сварка, окраска, сборка, лазерная обработка, складирование.
Особо следует акцентировать внимание на недальновидных высказываниях некоторых специалистов о разорительности робототехники и других средств гибкой автоматизации производства. Они, как нам думается, основаны на субъективных оценках сегодняшних, далеко не раскрытых возможностях новой техники и на предубеждении к отбору в качестве аргументов лишь неудачных примеров автоматизации производства. Факты из мировой практики полностью опровергают подобные утверждения. Достаточно сказать, что крупнейшие автомобильные компании промышленно развитых стран «Форд», «Дженерал моторс», «Фольксваген», «Ниссан», «Фиат», «Рено» уже подошли к завершению этапа полной роботизации сварочных и окрасочных производств на своих автосборочных заводах и активно приступили к роботизации других производств, включая механосборочные. Сегодня мысль о полном изготовлении автомобиля с помощью роботов уже никому не представляется фантастической.
Промышленный робот «Универсал-5.02» относится к классу универсальных и может быть использован для автоматизации погрузочно-разгрузочных работ при выполнении различных технологических операций, в том числе при выполнении сварочных работ.
Промышленный робот «Универсал-5.02» представляет собой автоматическую машину, состоящую из исполнительного устройства в виде манипулятора У-5.02 с шестью степенями подвижности (рис. 1), перепрограммируемого устройства программного управления АСП-1 с силовым преобразователем ПТ6-У.5.02 для выполнения в производственном процессе управляющих и двигательных функций.
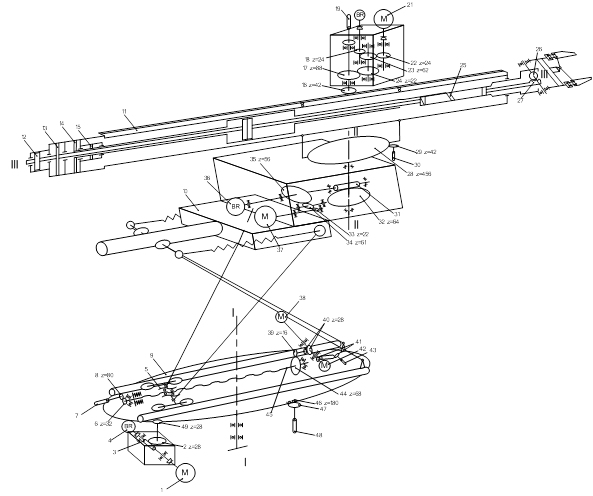
Рисунок 1 – Кинематическая схема манипулятора «Универсал-5.02»
Техническая характеристика:
1. Грузоподъемность, кг 5
2. Число степеней подвижности 6
3. Наибольшая величина перемещения:
вокруг вертикальной оси I-I, град 340
вдоль оси I-I, мм 400
вдоль горизонтальной оси III-III, мм 630
вокруг вертикальной оси II-II, град 240
вокруг оси III-III, град 180
вокруг оси IV-IV, град 180
4. Наибольшая скорость:
вокруг оси I-I поворота, град/с 84
вертикального хода руки, вдоль оси I-I, м/с…0,27
выдвижения руки вдоль оси III-III, м/с 1,08
поворота руки вдоль оси II-II, град/с 132
5. Точность позиционирования 1
6. Масса (вместе с устройством управления), 690кг
Вывод: в ходе лабораторной работы был изучен принцип работы промышленного робота «Универсал-5.02», а так же его основные характеристики. Была построена циклограмма выполнения работы промышленным роботом.