 2015-05-20
2015-05-20 5426
5426Простейшая функциональная структурная схема системы управления показана на рис .3.3 Здесь контроллер КН, получая информацию о цели управления в виде меняющегося во времени t сигнала задания x(t), формирует управляющее воздействие u(t) на объект ОБ таким образом, чтобы управляемая величина у(t) менялась в соответствии с изменением x(t), т. е. так, чтобы достигалась цель управления:
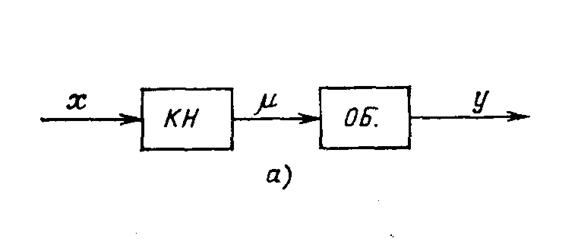
Рис.3.3. Функциональная схема системы автоматического управления.
Очевидно, что подобная система управления может реально функционировать только тогда, когда между изменением y(t) и вызвавшим его изменением \x(t) в объекте существует однозначное соответствие. Это соответствие отражается в математической модели объекта, которая предполагается заранее известной и может быть использована для определения алгоритма функционирования контроллера (алгоритма управления). Этот алгоритм определяет, как следует изменять управляющее воздействие u(t) в зависимости от изменения x(t) для того, чтобы была достигнута цель управления.
Информацию о математической модели объекта, используемую для проектирования алгоритма функционирования контроллера, называют априорной (начальной) информацией об объекте управления.
Практически рассмотренная структура системы управления может функционировать только при выполнении следующих довольно жестких условий: на объект управления не действуют никакие возмущения; математическая модель объекта известна для любого момента времени с достаточно высокой точностью; требуемый алгоритм управления может быть реализован в контроллере с достаточно высокой точностью.
Нарушение хотя бы одного из этих условий приведет к появлению неконтролируемого самопроизвольного отклонения управляемой величины от желаемого значения, причем с течением времени это отклонение может стать сколь угодно большим.
В этом случае в структуру системы управления приходится вводить добавочный канал, по которому контроллер получает информацию о действительном значении управляемой величины в каждый момент времени; это позволяет контроллеру при появлении отклонения от желаемого значения (независимо от того, какой причиной оно вызвано) осуществить добавочное изменение управляющего воздействия на объект так, чтобы это отклонение было ликвидировано.
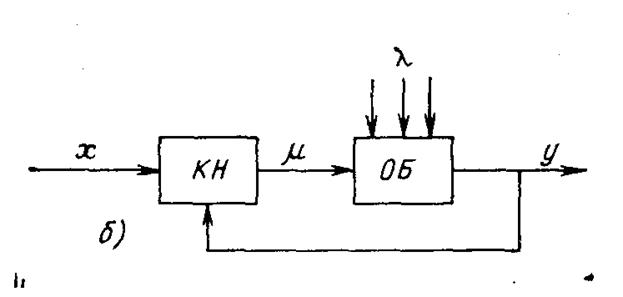
Рис. 3.4. Функциональная схема замкнутой системы автоматического
управления.
Соответствующая информационная структурная схема системы приведена на рис.3.4; канал, по которому информацию с выхода системы об изменении управляемой величины подается на вход контроллера, называют каналом обратной связи, или просто обратной связью. На этой схеме, помимо управляющего воздействия на объект ц (t), показаны также возмущающие воздействия X (t), число которых может быть неопределенно большим; среди них могут быть и недоступные для контроля.
В процессе работы контроллер получает текущую информацию о цели управления, а также информацию о текущем состоянии объекта и среды его функционирования и в соответствии с этой информацией (которая называется рабочей) формирует управляющие воздействия на объект так, чтобы была достигнута цель управления.
В системе с обратной связью (рис. 3.4 ) имеется замкнутый контур циркуляции сигналов; поэтому такие системы получили также название замкнутых систем управления. Соответственно систему управления без обратной связи (рис.3.3) называют разомкнутой.
На практике, особенно при управлении технологическими (и в том числе теплоэнергетическими) процессами, сформулированные выше условия применимости разомкнутых систем управления почти никогда не выполняются, так что реальные системы управления обычно имеют в своей структуре замкнутые контуры.
В зависимости от характера изменения сигнала задания (задающего воздействия) системы управления принято разделять на три вида:
1. Стабилизации, если задающее воздействие не меняется во времени.
2. Программного управления, если задающее воздействие является заранее известной (детерминированной) функцией времени.
3. Зависимого управления, или следящей, если задающее воздействие является неопределенной в будущем функцией времени, т. е. такой функцией, характер изменения которой в будущем нельзя прогнозировать или в лучшем случае можно прогнозировать лишь с определенной степенью вероятности.
Управление называется непрерывным, если осуществляемое контроллером изменение управляющего воздействия происходит в непрерывной зависимости от изменения задающего воздействия и управляемой величины (а возможно, и от производных и интегралов от этих изменений). В случае дискретного управления управляющее воздействие принимает лишь какое-нибудь одно из нескольких возможных значений (в пределе — только из двух возможных значений) либо формируется в дискретные моменты времени.
Дискретное управление, в частности, применяется тогда, когда алгоритм управления имеет характер логических условий; в этом случае его называют логическим. Логическое управление чаще всего применяется в пусковых режимах объекта, когда необходимо в определенной последовательности вводить в действие отдельные двигатели, механизмы и т. п. Обычно на практике при управлении сложными технологическим объектами непрерывное и дискретное управления применяются совместно. Так, управление температурой пара, вырабатываемого энергоблоком, производится непрерывно изменением положения клапана подачи воды на впрыск; однако при сильных изменениях нагрузки может понадобиться, кроме того, и переключение в схеме питательных магистралей и т. п.
3. Декомпозиция задач и систем управления
На практике задача управления, как правило, расчленяется на несколько взаимосвязанных, но в то же время относительно самостоятельных задач, что приводит и к расчленению системы управления на более мелкие соподчиненные подсистемы. Подобное скоординированное между собой расчленение задач и систем управления получило название декомпозиции задач и систем управления.
Как правило, из общей задачи управления выделяется задача устранения (или, по крайней мере, сведения к допустимому минимуму) вредного влияния на достижение цели управления действующих на объект неконтролируемых возмущений, а также неконтролируемых погрешностей в задании модели объекта, т. е. задача, которая в структуре замкнутой системы управления (рис. 1.1, б) решается на основе рабочей информации, получаемой контроллером по каналу обратной связи. Эта относительно самостоятельная часть задачи управления получила название задачи регулирования объекта, а часть системы управления, выполняющая эту задачу, — подсистемы регулирования.
В результате подобной декомпозиции задачи управления контроллер расчленяется на два соподчиненных блока:
1) регулирующий, осуществляющий функции регулирования; этот блок обычно называется автоматическим регулятором, или просто регулятором;
2) командный, вырабатывающий командное воздействие на регулятор таким образом, чтобы была достигнута цель управления.
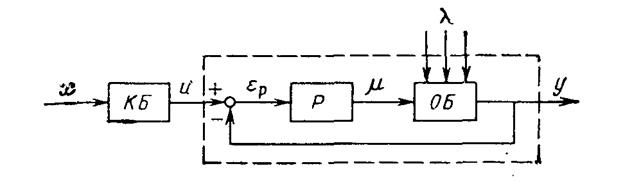
Рис. 3.5. Функциональная схема системы автоматического управления.
Структура системы управления в этом случае приобретает указанный на рис. 1.2 вид. Командное воздействие и (t), вырабатываемое командным блоком КБ, подается на вход подсистемы регулирования (на схеме она очерчена штриховой линией), где на основании выявленного отклонения управляемой величины от командного воздействия ер (t) = и (t) — у (t) регулятор Р формирует управляющее воздействие \i (t). Выявление отклонения ер (t) происходит в сумматоре, обозначенном на схеме кружком; знак, с которым берется каждое слагаемое, указан у концов соответствующих стрелок, входящих в сумматор.
Смысл подобного, опосредствованного через подсистему регулирования, управления состоит в том, что отклонения управляемой величины от ее заданного значения, вызванные возмущениями и другими неучтенными факторами, достаточно эффективно устраняются регулятором, так что такую систему управления можно рассматривать как систему управления объектом без возмущений (см. рис. 1.1, а), функции которого теперь выполняет подсистема регулирования в целом.
Рассмотренную систему управления (рис. 1.2) можно считать двухуровневой: первый (нижний) уровень образует подсистема регулирования, второй — система управления со структурой, показанной на рис. 1.1, а, в которой в качестве контроллера КН выступает КБ, а в качестве объекта ОБ — подсистема регулирования. Такого рода двухуровневые (а в общем случае и многоуровневые) структуры систем управления, в которых верхний уровень выполняет командные функции по отношению к нижестоящему уровню, получили название иерархических структур систем управления. Расчленение системы на соподчиненные уровни, на каждом из которых решается своя, относительно простая частная задача управления, позволяет сравнительно просто и эффективно решать общую задачу управления.

