 2015-05-10
2015-05-10 4925
4925Тема: Исследование работы датчиков линейного и углового перемещения
Цель: Изучение принципа работы, конструкции и устройства датчиков линейного и углового перемещения.
Задание:
1. Рассмотреть принципы действия и схемы построения датчиков линейного перемещения: емкостных; оптических; индуктивных; вихретоковых; ультразвуковых; магниторезистивных; потенциометрических.
2. Рассмотреть принципы действия и схемы построения датчиков углового перемещения: оптических; магнитных; магниторезисторных.
3. Сделать вывод по работе.
Теоретическая часть:
Датчик перемещения — это прибор, предназначенный для определения величины линейного или углового механического перемещения какого-либо объекта.
Емкостные датчики перемещения
В основе работы датчиков данного типа лежит взаимосвязь ёмкости конденсатора с его геометрической конфигурацией. В простейшем случае речь идёт об изменении расстояния между пластинами вследствие внешнего физического воздействия (Рисунок 1). Поскольку ёмкость конденсатора изменяется обратно пропорционально величине зазора между пластинами, определение ёмкости при прочих известных параметрах позволяет судить о расстоянии между пластинами. Изменение ёмкости можно зафиксировать различными способами (например, измеряя его импеданс), однако в любом случае конденсатор необходимо включить в электрическую цепь.
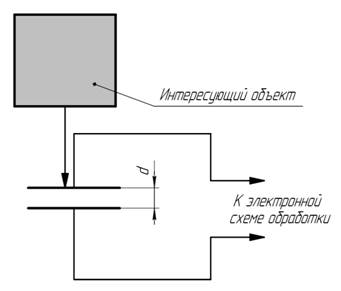
Рисунок 1. Емкостной датчик линейного перемещения с изменяющейся величиной зазора.
Другой схемой, где выходным параметром является электрическая ёмкость, является схема, содержащая конденсатор с подвижным диэлектриком (Рисунок 2). Перемещение диэлектрической пластины между обкладками конденсатора также приводит к изменению его ёмкости. Пластина может быть механически связана с интересующим объектом, и в этом случае изменение ёмкости свидетельствует о перемещении объекта. Кроме того, если сам объект обладает свойствами диэлектрика и имеет подходящие габариты — он может быть использован непосредственно в качестве диэлектрической среды в конденсаторе.
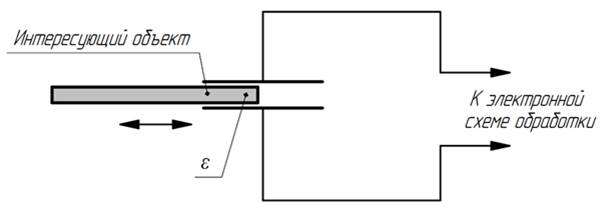
Рисунок 2. Емкостной датчик линейного перемещения с подвижным диэлектриком.
Оптические датчики перемещения
Существует множество вариаций схем датчиков перемещения, основанных на различных оптических эффектах. Пожалуй, наиболее популярной является схема оптической триангуляции — датчик положения является, по сути, дальномером, который определяет расстояние до интересующего объекта, фиксируя рассеянное поверхностью объекта излучение и определяя угол отражения, что даёт возможность определить длину d — расстояние до объекта (Рисунок 3). Важным достоинством большинства оптических датчиков является возможность производить бесконтактные измерения, кроме того такие датчики обычно довольно точны и имеют высокое быстродействие.
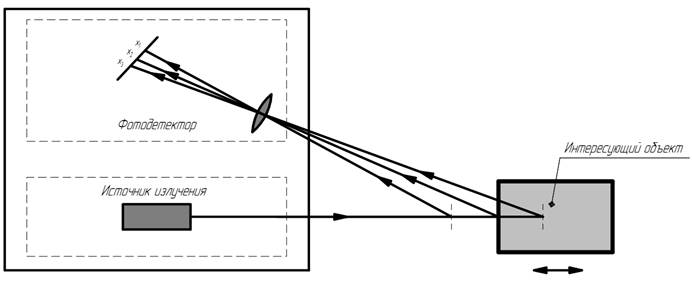
Рисунок 3. Оптический датчик перемещения на основе схему оптической триангуляции.
В другой реализации оптического датчика, предназначенной для регистрации и определения параметров малых перемещений и вибраций, используется двойная решётчатая конструкция, а также источник света и фотодетектор (Рисунок 4). Одна решётка неподвижна, вторая подвижна и может быть механически закреплена на интересующем объекте или каким-либо способом передавать датчику его движение. Малое смещение подвижной решётки приводит к изменению интенсивности света, регистрируемой фотодетектором, причём с уменьшением периода решётки точность датчика возрастает, однако сужается его динамический диапазон.
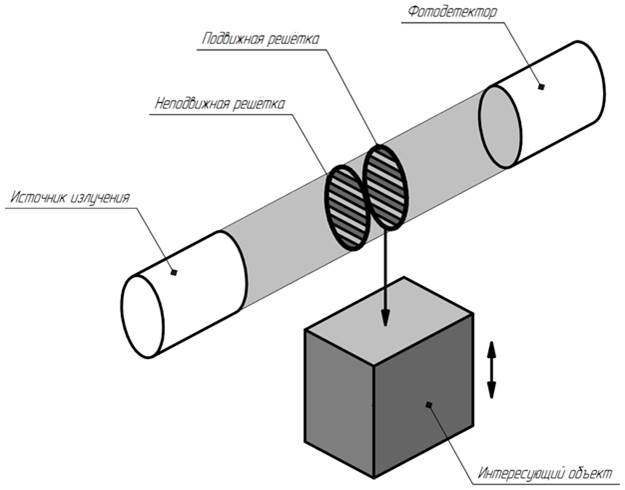
Рисунок 4. Оптический датчик перемещения на основе дифракционных решеток.
Дополнительными возможностями применения обладают оптические датчики, учитывающие поляризацию света. В таких датчиках может быть реализован алгоритм селекции объектов по отражательным свойствам поверхности, т.е. датчик может «обращать внимание» только на объекты с хорошей отражающей способностью, прочие объекты игнорируются. Разумеется, чувствительность к поляризации негативно сказывается на стоимости подобных устройств.
Индуктивные датчики перемещения
В одной из конфигураций датчика данного типа чувствительным элементом является трансформатор с подвижным сердечником. Перемещение внешнего объекта приводит к перемещению сердечника, что вызывает изменение потокосцепления между первичной и вторичной обмотками трансформатора (Рисунок 5). Поскольку амплитуда сигнала во вторичной обмотке зависит от потокосцепления, по величине амплитуды вторичной обмотки можно судить о положении сердечника, а значит и о положении внешнего объекта.
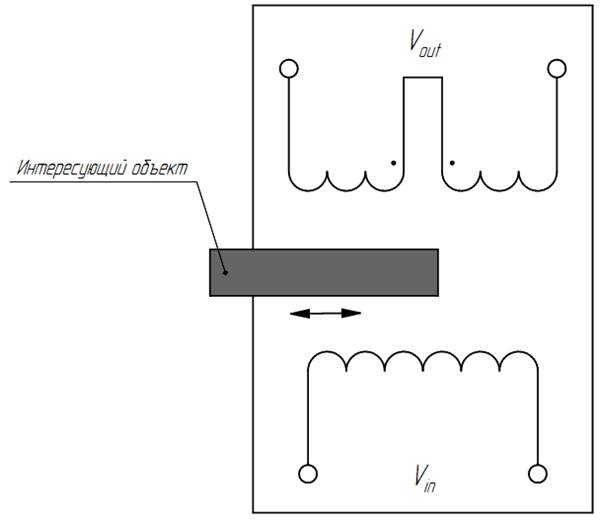
Рисунок 5. Индуктивный датчик перемещения на трансформаторе.
Другая конфигурация имеет более простую схему, однако она пригодна лишь для небольшого количества приложений, где требуется определять незначительные перемещения или вибрации объектов, состоящих из ферромагнитного материала. В данной схеме интересующий ферромагнитный объект играет роль магнитопровода, положение которого влияет на индуктивность измерительной катушки (Рисунок 6).
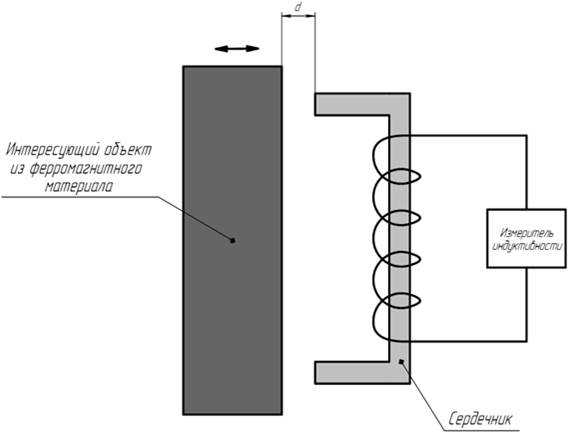
Рисунок 6. Индуктивный датчик перемещения для объектов из ферромагнитных материалов.
Вихретоковые датчики перемещения
Датчики данного типа содержат генератор магнитного поля и регистратор, с помощью которого определяется величина индукции вторичных магнитных полей. Вблизи интересующего объекта генератор создаёт магнитное поле, которое, пронизывая материал объекта, порождает в его объёме вихревые токи (токи Фуко), которые, в свою очередь, создают вторичное магнитное поле (Рисунок 7). Параметры вторичного поля определяются регистратором, и на их основании вычисляется расстояние до объекта, так как чем объект ближе, тем больший магнитный поток будет пронизывать его объём, что усилит вихревые токи и индукцию вторичного магнитного поля. Подобный принцип используется и ввихретоковых дефектоскопах, однако там на параметры вторичного магнитного поля влияет не расстояние до объекта, а наличие в его внутренней структуре скрытых несовершенств. Метод является бесконтактным, однако может применяться только для металлических тел.
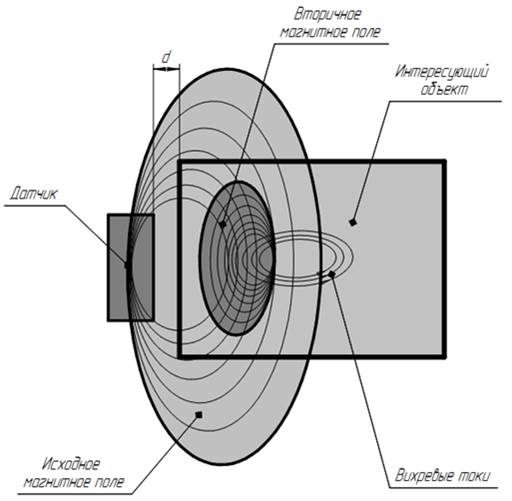
Рисунок 7. Вихретоковый датчик перемещения.
Ультразвуковые датчики перемещения
В ультразвуковых датчиках реализован принцип радара – фиксируются отражённые от объекта ультразвуковые волны, поэтому структурная схема обычно представлена источником ультразвуковых волн и регистратором (Рисунок 8), которые обычно заключены в компактный корпус. Определение временной задержки между моментами отправки и приёма ультразвукового импульса позволяет измерять расстояние до объекта с точностью, доходящей до десятых долей миллиметра. Наряду с оптическими, ультразвуковые датчики на сегодняшний день являются, пожалуй, наиболее универсальным и технологичным бесконтактным средством измерения. Использование этого принципа измерений опять же можно найти в детекторах обнаружения дефектов, только на этот раз уже в ультрозвуковых дефектоскопах.
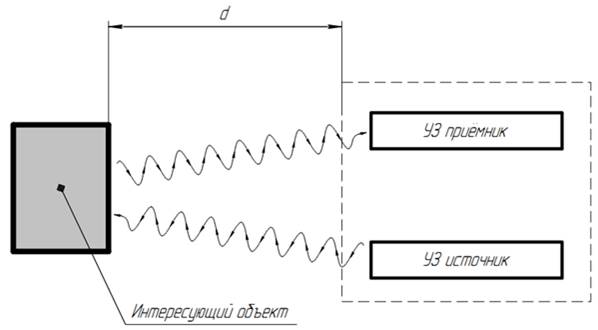
Рисунок 8. Ультразвуковой датчик перемещения.
Магниторезистивные датчики перемещения
В магниторезистивных датчиках перемещения используется зависимость электрического сопротивления магниторезистивных пластинок от направления и величины индукции внешнего магнитного поля. Датчик, как правило, состоит из постоянного магнита и электрической схемы, содержащей включённые по мостовой схеме магниторезистивные пластинки и источник постоянного напряжения (Рисунок 9). Интересующий объект, состоящий из ферромагнитного материала, перемещаясь в магнитном поле, изменяет его конфигурацию, вследствие чего изменяется сопротивление пластинок, и мостовая схема регистрирует рассогласование, по величине которого можно судить о положении объекта.
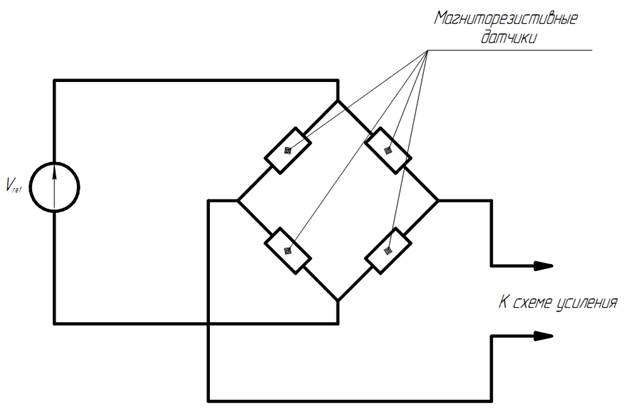
Рисунок 9. Магниторезистивный датчики перемещения.
Датчики на основе эффекта Холла
Датчики этого типа имеют конструкцию подобную конструкции магниторезистивных датчиков, однако в основу их работы положен эффект Холла — прохождение тока через проводник, на который воздействует внешнее магнитное поле, приводит к возникновению разности потенциалов в поперечном сечении проводника.
Магнитострикционные датчики перемещения
Как правило, магнитострикционный датчик представляет собой протяжённый канал - волновод, вдоль которого может свободно перемещаться постоянный кольцевой магнит. Внутри волновода содержится проводник, способный при подаче на него электрических импульсов создавать магнитное поле вдоль всей своей длины (Рисунок 10). Полученное магнитное поле складывается с полем постоянного магнита, и результирующее поле создаёт момент вращения канала, содержащего волновод (эффект Вайдемана). Импульсы вращения распространяются по каналу в обе стороны со скоростью звука материала канала. Регистрация временной задержки между отправкой электрического импульса и приёма импульса вращения позволяет определить расстояние до постоянного магнита, т.е. определить его положение. Канал может иметь довольно большую длину (до нескольких метров), а положение магнита может быть определено с точностью до нескольких микрометров. Магнитострикционные датчики обладают отличной повторяемостью, разрешением, устойчивостью к неблагоприятным условиям и низкой чувствительностью к температурным изменениям.
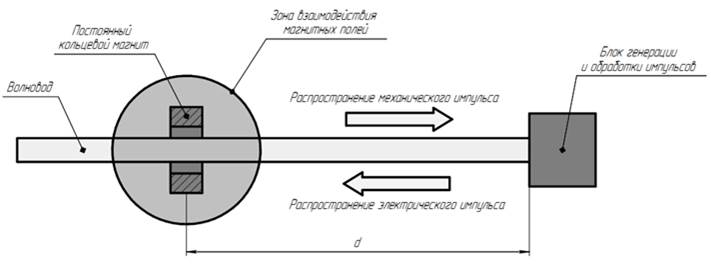
Рисунок 10. Магнитострикционный датчик перемещения.
Потенциометрические датчики перемещения
Датчик данного типа в своей основе имеет электрический контур, содержащий потенциометр (Рисунок 11). Линейное перемещение объекта приводит к изменению сопротивления потенциометра (переменного резистора). Если через потенциометр пропускать постоянный ток, то падение напряжения на нём будет пропорционально величине сопротивления, и, следовательно, величине линейного перемещения интересующего объекта.
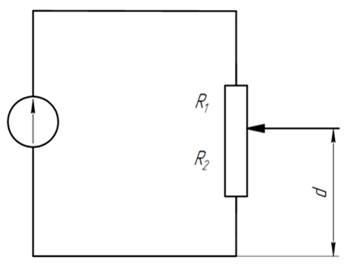
Рисунок 11. Потенциометрический датчик перемещения.
Наряду с механическими датчиками перемещения, потенциометрические датчики получили наиболее широкое распространение в силу своей простоты и низкой стоимости, однако для универсальных, прецизионных и бесконтактных измерений в последнее время всё чаще используются датчики на основе оптических эффектов.
Контроллер (датчик) положения вращающегося объекта или по-другому энкодер - это электромеханическое устройство, с помощью которого можно определить положение вращающейся оси (вала). В данном устройстве механическое движение преобразовывается в электрические сигналы, определяющие положение объекта, дают информацию об угле поворота вала, его положении и направлении вращения. С помощью энкодера также можно измерить длину и расстояние или установить перемещение инструмента.
Энкодеры имеют широкую сферу применения в печатной промышленности, металлообработке, лифтовой технике, автоматах для фасовки, упаковки и розлива, в испытательных стендах, а также в роботах и прочих машинах, требующих точной регистрации показателей движения частей. Они практически полностью заменили широко распространенные ранее сельсины.
Типы энкодеров
Выделяют следующие типы энкодеров: инкрементальные (инкрементные) и абсолютные.








