 2015-05-13
2015-05-13 3549
3549Резольверы применяются в приложениях, где требуется очень точное измерение угловых перемещений и скорости, например в сервосистемах и роботах. Выходной сигнал резольвера - это мера углового перемещения, дифференцирование этого сигнала дает угловую скорость. Резольвер работает на принципе измерения взаимоиндукции между двумя обмотками (рис. 2.5).Ротор резольвера соединен с вращающимся объектом. На первичную обмотку ротора подается переменное напряжение v ref. Статор состоит из двух обмоток, развернутых на 90° друг относительно друга. Напряжение на этих обмотках
соответственно, где θ - угловое положение ротора.
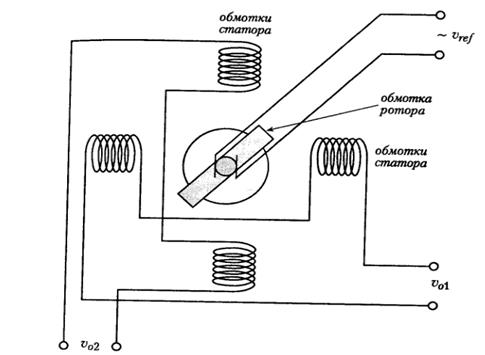
Рис. 2.5. Принцип работы резольвера
Можно сказать, что выходные напряжения v о1 и v о2 представляют собой напряжение v ref промодулированное величиной угла θ. Используя одно из выходных напряжений, можно однозначно измерить углы лишь в диапазоне 0-90°, оба сигнала позволяют однозначно измерять углы от 0е до 360°.
Выход резольвера есть тригонометрическая функция угла. Эта нелинейность, однако, не всегда является недостатком. Например, при управлении вращающими моментами в роботах требуются именно тригонометрические функции углов поворота. Поэтому выходной сигнал резольвера можно непосредственно использовать для управления без дополнительного преобразования в реальном времени, которое увеличило бы загрузку управляющего контроллера.
Проблемы при работе резольвера могут возникать только из-за щеток ротора (износ, дополнительные шумы и механические нагрузки). Резольверы поставляются в виде полнофункциональных автономных устройств.








