 2015-05-13
2015-05-13 1269
1269
Мпуск. макс = 2,9 Мном – принят по каталогу
Мпуск. мин = 1,1 Мном – приняли сами (из характеристики ЭД)
Номинальный момент ЭД:
Таким образом, средний пусковой момент равный 30 кгм оказывается меньше максимально допустимого момента, который может передать редуктор.

Определим τП при подъеме максимального груза
Фактическое ускорение при пуске на подъем Qнои .
 , что примерно соответствует рекомендуемому для кранов.
, что примерно соответствует рекомендуемому для кранов.
Время движения в установившемся режиме:
Среднеквадратичный момент эквивалентный по нагреву действительной переменной нагрузке будет:

Среднеквадратичная мощность ЭД

Таким образом выбранный ЭД с номинальной мощностью равной 11 кВт является вполне пригодным (Nном > Nср).
4.7. Определение тормозного момента и выбор тормоза.
Тормозной момент определяется по формуле:

где к – коэффициент запаса торможения, принимается согласно Правил Технадзора для среднего «С» режима равным 1,75;
МСТ – статический крутящий момент на тормозном валу при торможении при торможении, определенный в предположении равномерного распределения нагрузки между всеми ветвями полиспаста с учетом потерь в механизме, способствующих удержанию груза;

тогда:

Принимаем по нормам тормоз ТКТГ – 200, колодочный с электрогидравлическим приводом (одноштоковый толкатель). Максимальный МТ=30 кг м.
4.8. Разработка принципиальной схемы управления.
При выборе схемы управления (СУ) учитываются следующие требования, предъявляемые к крановым установкам:
а) точная остановка груза;
б) ускорение и замедление груза без раскачивания в минимально возможное время;
в) ограничение усилия в кинематической цепи и металлоконструкции крана.
При различном назначении кранов это предъявляется по разному.
Например: краны на монтаже турбин, станков, судовых конструкций должны обеспечивать точную фиксацию перемещаемого груза. Столь высокая точность достигается применением дорогостоящей системы регулирования скорости электропривода, обладающей «жесткими» механическими характеристиками в широком диапазоне изменения скорости перемещения груза.
При реостатном регулировании в электроприводах с АД (фазный ротор) и ЭЛ постоянного тока используют типовые СУ с силовыми или магнитными контроллерами.
В таблице 4.4 приведены рекомендации в использовании контроллеров от режима работы крана и мощности тягового ЭД.
Таблица 4.4.
| Мощность ЭД, кВт | Тип контроллера в режиме работы | |||
| «Л» | «С» | «Т» | «ВТ» | |
| До 10 До 30 Свыше 30 | Силовой Силовой Силовой | Силовой Силовой Магнитный | Силовой Магнитный Магнитный | Магнитный Магнитный Магнитный |
СУ с контроллерами могут быть симметричными и несимметричными в зависимости от характера нагрузки.
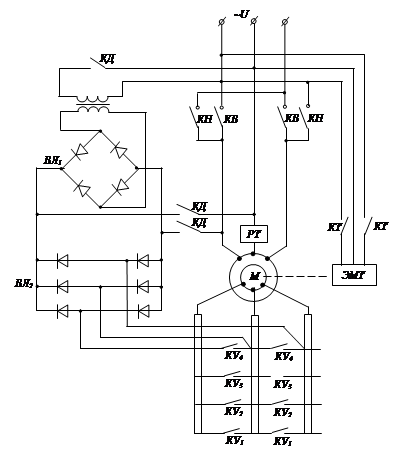
В приводе ЭД подъема используют контроллеры с несимметричной диаграммой замыкания. На рис. 4.8 приведена симметричная схема управления с силовым контроллером ККТ-61 для управления АД передвижения крана.
 Регулирование скорости достигается поочередным включением КУ1 – КУ4.
Регулирование скорости достигается поочередным включением КУ1 – КУ4.
АД защищен от перегрузки и токов к.з. максимальной защитой РМ1,РМ2, КН1 обеспечивает минимальную защиту привода при недопустимом снижении напряжении сети. Все электрооборудо- вание схемы управления и защиты размещено на защитной панели ПЗК
На рис. 4.9 приведена силовая часть схемы управления ЭД постоянного тока с силовым контроллером ККП – 102.
ККП-102 имеет 5 положений на подъем и 6 положений на спуск. Напряжение на ЭД подается общим контактором и контактором подъема.
а) при подъеме груза обмотки ЯО и ОВ включаются последовательно, а скорость и ток регулируются RП. (Такая схема позволяет поднимать малые грузы с большей скоростью).
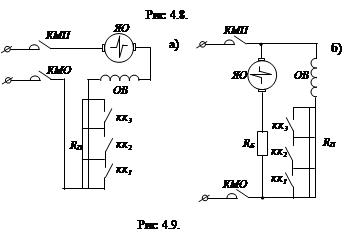 б) При опускании груза ЭД включается по схеме с параллельным возбуждением, регулирование скорости в цепи якоря с помощью Rб и ОВ – КП.
б) При опускании груза ЭД включается по схеме с параллельным возбуждением, регулирование скорости в цепи якоря с помощью Rб и ОВ – КП.
Остановка груза осуществляется переводом ККП-102 в положение «0», т.к. обеспечивается катушка ЭМТ.
В процессе опускания груза при переводе ККП в положение «0» ЭД включается по схеме динамического торможения с самовозбуждением.
В схеме предусмотрена максимальная защита, защита от обрыва троса и минимальная защита. Все элементы управления и защиты размещены на панели ППЗК.
Управление ЭД высокопроизводительных кранов с напряженным режимом работы (высокая частоты включения ЭД) осуществляется с помощью магнитных контроллеров (МК).
МК состоит из малогабаритного командо-контроллера (КК), который включает катушки контакторов, производящих переключения в силовой сети, а также в МК входит релейная аппаратура защиты автоматического пуска и торможения.
КК расположен в кабине оператора, а релейно-контактная часть аппаратуры в шкафах на мосту фермы крана.
Автоматизация процессов пуска-торможения с применением МК позволяет полнее использовать ЭД, существенно снизить толчки тока в системе электроснабжения и облегчить работу оператора.
Для управления АД с ФЗР используют две группы МК – Т и К, для управления ЭД постоянного тока – МК типа П. Цепи управления МК-Т от сети переменного тока, МК-К от сети постоянного тока (через выпрямители).
В схемах с симметричной нагрузкой используют МК типа Т, К, П, с несимметричной нагрузкой – МК – ТС, КС, ПС.
В тяжелых кранах с режимом работы «Т» и «ВТ» для повышения надежности используют схему сдвоенного электропривода с МК типа ДТ, ДК, ДП или ДТС, ДКС, ДПС
Схема с МК ТСА обеспечивает автоматический пуск, реверсирование и торможение ЭД, а также концевую защиту.
МК постоянного тока типа П, ПС и ДП, ДПС предназначены для управления ЭД последовательного возбуждения. Их применяют в тяжелых режимах работы «Т» при частоте включения до 900 в час.
МК постоянного тока обеспечивает те же режимы управления ЭД как и МК ТСА, кроме того все виды защиты (максимальная защита по перепадам тока и току короткого замыкания минимальному напряжению и др. Минимальное напряжение срабатывает при уменьшении напряжения сети до 45% номинального, а также при срабатывании РМ, РП или КВВ и позволяет производить повторный пуск ЭД только через «0» положение рукоятки КК.
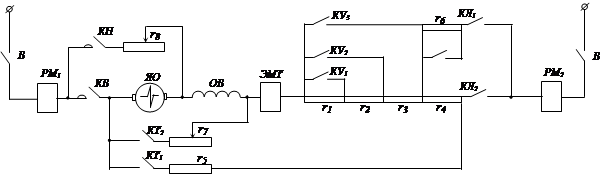 |
Рис. 4.10. Схема механизма подъема.
Схема обеспечивает автоматический пуск, реверс и торможение по времени. При подъеме груза последовательно с ЯО и ОВ включаются дополнительный резистор (r1 – r4) – выведением ручки КК из «0» в I, II, III, IV – положение.
Положение «I» является предварительным и служит для выбора люфта в узлах кинематической цепи, а в случае малых «т» – подъеме их с малой скоростью.
r8 – параллельно включенный с ЯО, способствует увеличению жесткости реостатной характеристики и расширяет пределы регулирования скорости ω.
При подъеме «т» – торможение и остановка переводом КК в положение «0». При этом ЭД уменьшает скорость под действием «т» и механического тормоза.
При опускании «т» ЭД включается по потенциометрической схеме, исключающей свободное падение «т».
Перевод КК из любого положения в «0» сопровождается торможением ЭД с самовозбуждением.
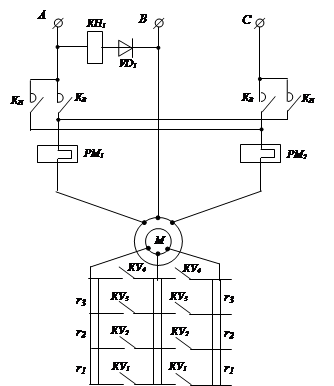
На рис. 4.11 приведена схема управления (силовая часть) АД с ФЗР крана для особо точных работ. В схеме для улучшения регулировочных характеристик при опускании «т» вместо однофазного включения АД применен режим динамического торможения при самовозбуждении.
КК имеет по 4 положения на увеличение и уменьшение «т», что дает возможность получить 10 механических характеристик.
В положении «IV» в цепи ротора остается включенным R ограничивающее, а основная характеристика обеспечивает номинальную скорость подъема «т».
 В положении «0» все аппараты схемы отключены за исключением РВ. ЭД застопорен ЭМТ.
В положении «0» все аппараты схемы отключены за исключением РВ. ЭД застопорен ЭМТ.
Рис. 4.11. Схема управления АД с ФЗР через МК – ТС.
Смысл торможения таков, что трехфазная обмотка ротора становится генератором и питает обмотку статора постоянным током.
При опускании «т» АД может работать на четырех характеристиках:
С1 – режим динамического торможения,
С2, С3 – режим противовключения,
С4 – позволяет опускать «т» со сверх синхронной скоростью.
На характеристике С1 постоянный ток подается в обмотку статора через ВЛ2 (ВЛ1 для начального возбуждения. КН, КВ – отключены, РТ – служит (помимо максимальной защиты) для контроля токов динамического торможения. При исчезновении IДТ РТ включает РВ, РВ отключает КЛ защитной панели и происходит механическое торможение ЭД.
На характеристике С2 при переводе КК в положение «II» обесточивается КД, включаются КВ и КП, Эд переводится в режим противовключения.
Для точной посадки необходимо ручку КК в положении «0», а затем в положение «I» на опускание «т».
Краны большой грузоподъемности с тяжелым режимом работы последнее время оборудуются электроприводом с регулируемым источником напряжения питания (т.н. вентильным приводом).
4.9. Особенности электроснабжения крановых установок.
1) Определение расчетного тока через потребляемую мощность:
Р = сР3 + вРс, квт
где Р3 - установленная мощность трех наибольших в группе ЭД ЭД при ПВ =25%;
Рс – суммарная мощность всех ЭД ЭД группы при ПВ=25%;
с и в – опытные коэффициенты (при расчетах с=0,3; в=0,06 – 0,18)
2) Расчетный ток

cosφ=0,7 – средний коэффициент мощности ЭД крана.

