 2015-05-13
2015-05-13 2702
2702 |
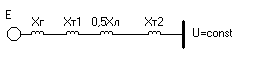
Рассмотрим сначала простейший случай работы элетростанции через двухцепную линию электропередачи (ЛЭП) на шины бесконечной мощности (рис.1).
Рис.1. Принципиальная схема электропередачи
Предпосылка постоянства напряжения на шинах системы по абсолютно-
ному значению и фазе исключает возможность качаний приемной системы и значительно упрощает анализ явлений.
На рис. 2 приведена упрощенная схема замещения рассматриваемой си-
стемы при нормальном режиме, представляющая собой последовательное соединение индуктивных сопротивлений отдельных элементов системы, дающее в сумме:  здесь под индуктивным сопротивлением генератора следует понимать его переходное индуктив-
здесь под индуктивным сопротивлением генератора следует понимать его переходное индуктив-
 |
ное сопротивление

Рис. 2. Схема замещения электропередачи для нормального режима
При быстром изменении угла в нормальном или аварийном режиме характеристику мощности генератора можно считать синусоидальной, отбросив вторую гармонику мощности,

где  - переходная ЭДС генератора, приложенная в его схеме замеще-
- переходная ЭДС генератора, приложенная в его схеме замеще-
ния за переходным индуктивным сопротивлением, одинаковым для его
продольной и поперечной осей;  - угол сдвига вектора ЭДС
- угол сдвига вектора ЭДС  относи-
относи-
тельно вектора напряжения приемной системы  .
.
Эта зависимость для нормального режима представлена на рис. 4 (кривая 1).
Предположим, что в начале одной из цепей ЛЭП в точке К произошло несимметричное к.з. (рис.1). Схема замещения системы для этого режима принимает вид, изображенный на рис. 3 а, где в точке К включено эквивалентное шунтирующее сопротивление к.з.  , состоящее в общем случае из сопротивлений схем замещения обратной и нулевой последовательностей.
, состоящее в общем случае из сопротивлений схем замещения обратной и нулевой последовательностей.
 |
Рис.3. Схема замещения электропередачи при коротком замыкании (а)
и ее преобразование (б)
В связи с изменением конфигурации схемы замещения вследствие к.з. при неизменной ЭДС генератора, значение передаваемой системе мощности от генератора изменяется. Выражение для передаваемой мощности при к.з. можно найти с помощью преобразования схемы замещения системы для аварийного режима. Эта схема представляет собой звезду с лучами:
 и
и 
Как известно, звезда может быть преобразована в эквивалентный треугольник (рис.3 б), стороны которого будут представлены следующими индуктивными сопротивлениями:
 (1)
(1)
Индуктивные сопротивления  и
и  , подключенные непосредственно к ЭДС и напряжению , не влияют на значение активной мощности генератора в аварийном режиме и могут быть отброшены.
, подключенные непосредственно к ЭДС и напряжению , не влияют на значение активной мощности генератора в аварийном режиме и могут быть отброшены.
При этом весь поток активной мощности генератора направляется через индуктивное сопротивление  , которое можно рассматривать в данном случае как эквивалентное индуктивное сопротивление системы в аварийном режиме. В этих условиях характеристика мощности генератора имеет вид:
, которое можно рассматривать в данном случае как эквивалентное индуктивное сопротивление системы в аварийном режиме. В этих условиях характеристика мощности генератора имеет вид:
 . (2)
. (2)
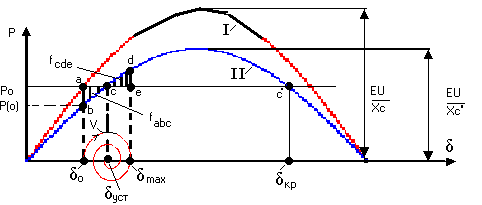 |
Зависимость мощности от угла имеет синусоидальный характер, но амплитуда ее меньше, чем при нормальном режиме, так как знаменатель в выражении (2) больше, чем в (1). Обе синусоиды приведены на рис.4.
Рис.4. Анализ колебаний по правилу площадей
На рис. 4 отдаваемая генератором мощность и угол между ЭДС и напряжением при нормальном режиме обозначены соответственно через  и
и  . В момент к.з. в связи с изменением параметров схемы происходит переход с одной характеристики мощности на другую. Так как вследствие инерции ротора угол
. В момент к.з. в связи с изменением параметров схемы происходит переход с одной характеристики мощности на другую. Так как вследствие инерции ротора угол  мгновенно измениться не может, то отдаваемая генератором мощность уменьшается до значения
мгновенно измениться не может, то отдаваемая генератором мощность уменьшается до значения  определяемого углом
определяемого углом  на кривой II.
на кривой II.
Мощность первичного двигателя электростанции (турбины) вследствие запаздывания регулятора турбины остается при этом неизменной и равной  .
.
С изменением угла отдаваемая генератором мощность начинает увеличиваться и избыточный ускоряющий момент падает. В точке  (рис.4) избыток мощности равен нулю, относительная же скорость ротора
(рис.4) избыток мощности равен нулю, относительная же скорость ротора  достигает здесь максимума, и ротор по инерции проходит дальше. Теперь отдаваемая мощность становится уже больше мощности турбины и избыточный момент меняет свой знак, и ротор начинает тормозиться.
достигает здесь максимума, и ротор по инерции проходит дальше. Теперь отдаваемая мощность становится уже больше мощности турбины и избыточный момент меняет свой знак, и ротор начинает тормозиться.
В период торможения генератор покрывает избыток отдаваемой мощности за счет избыточной кинетической энергии, запасенной им в период ускорения. В некоторой точке  , соответствующей углу, при котором запас избыточной кинетической энергии ротора иссякнет, относительное перемещение ротора прекратится, а так как в этой точке имеется избыточный тормозящий момент, начинается относительное движение ротора в обратном направлении. Пройдя по инерции точку
, соответствующей углу, при котором запас избыточной кинетической энергии ротора иссякнет, относительное перемещение ротора прекратится, а так как в этой точке имеется избыточный тормозящий момент, начинается относительное движение ротора в обратном направлении. Пройдя по инерции точку  и достигнув минимального угла отклонения, ротор останавливается в своем относительном движении и затем снова начинает ускоряться. После нескольких колебаний с постепенно затухающей амплитудой относительное движение ротора прекратится и его положение будет определяться точкой
и достигнув минимального угла отклонения, ротор останавливается в своем относительном движении и затем снова начинает ускоряться. После нескольких колебаний с постепенно затухающей амплитудой относительное движение ротора прекратится и его положение будет определяться точкой  , являющейся точкой установившегося режима на новой характеристике мощности. Если бы ротор при первом отклонении прошел угол
, являющейся точкой установившегося режима на новой характеристике мощности. Если бы ротор при первом отклонении прошел угол  , соответствующий мощности
, соответствующий мощности  на падающей ветви характеристики II, то избыточный момент вновь изменил бы свой знак и сделался бы снова ускоряющимся. При этом с дальнейшим увеличением угла ускоряющий момент стал бы нарастать и генератор выпал бы из синхронизма.
на падающей ветви характеристики II, то избыточный момент вновь изменил бы свой знак и сделался бы снова ускоряющимся. При этом с дальнейшим увеличением угла ускоряющий момент стал бы нарастать и генератор выпал бы из синхронизма.
Приведенные на рис. 4 характеристики дают возможность определить максимальное отклонение угла ротора и установить, сохраняет ли система устойчивость.
Действительно, ординаты заштрихованных площадок (рис. 4) представляют собой избыток мощности  создающий избыточный момент того или иного знака. Значение избыточного момента
создающий избыточный момент того или иного знака. Значение избыточного момента
 (3)
(3)
где  - угловая скорость вращения ротора.
- угловая скорость вращения ротора.
При качании ротора генератора  непрерывно изменяется, однако это изменение весьма невелико по сравнению с синхронной угловой скоростью
непрерывно изменяется, однако это изменение весьма невелико по сравнению с синхронной угловой скоростью  . Подставляя вместо синхронную скорость
. Подставляя вместо синхронную скорость  , получаем:
, получаем:

так как в системе относительных единиц  = 1.
= 1.
Таким образом, избыточный момент в относительных единицах может быть принят численно равным избытку мощности  в относительных единицах.
в относительных единицах.
Рассматривая лишь относительное движение ротора и работу, совершаемую в этом относительном движении, можно принять, что при перемещении ротора генератора на бесконечно малый угол  избыточный момент совершает элементарную работу, равную
избыточный момент совершает элементарную работу, равную  При отсутствии потерь вся эта работа идет на изменение кинетической энергии ротора (в его относительном движении).
При отсутствии потерь вся эта работа идет на изменение кинетической энергии ротора (в его относительном движении).
В рассматриваемом случае избыточный момент сначала ускоряет вращение ротора, и работа, совершаемая в период ускорения при перемещении ротора от  до
до  , равна:
, равна:
где  представляет собой заштрихованную на рис.4 площадку
представляет собой заштрихованную на рис.4 площадку  . Таким образом, кинетическая энергия, запасенная ротором в период его ускорения, равна площадке
. Таким образом, кинетическая энергия, запасенная ротором в период его ускорения, равна площадке  . Эту площадку называют площадью ускорения.
. Эту площадку называют площадью ускорения.
После того как ротор пройдет точку своего установившегося положения на новой характеристике мощности, избыточный момент меняет свой знак и начинает тормозить вращение ротора. Изменение кинетической энергии в период торможения при перемещении ротора от  до
до  равно:
равно:
 .
.
Площадка  может быть названа площадью торможения.
может быть названа площадью торможения.
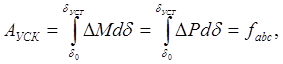
В период торможения ротор возвращает запасенную им ранее избыточную кинетическую энергию. Когда вся запасенная ротором избыточная энергия будет израсходована, то есть когда работа торможения  уравновесит работу ускорения
уравновесит работу ускорения  , относительная скорость становится равной нулю, поскольку кинетическая энергия пропорциональна квадрату относительной скорости движения ротора. В этот момент ротор останавливается в своем относительном движении, и достигнутый им при этом угол
, относительная скорость становится равной нулю, поскольку кинетическая энергия пропорциональна квадрату относительной скорости движения ротора. В этот момент ротор останавливается в своем относительном движении, и достигнутый им при этом угол  является максимальным углом отклонения ротора машины. Таким образом, для определения угла оказывается достаточным выполнения равенства:
является максимальным углом отклонения ротора машины. Таким образом, для определения угла оказывается достаточным выполнения равенства:  или, что то же самое:
или, что то же самое:
 (4)
(4)
Уравнение (4) показывает, что при максимальном допустимом угле отклонения площадь торможения должна быть равна площади ускорения и, следовательно, задача сводится к тому, чтобы найти положение точки  , удовлетворяющее этому условию, что может быть сделано графически.
, удовлетворяющее этому условию, что может быть сделано графически.
Максимально возможная площадь торможения на рис.4 равна площадке  Если бы эта площадь оказалась меньше площади ускорения
Если бы эта площадь оказалась меньше площади ускорения  , то генератор выпал бы из синхронизма. Отношение возможной площади торможения к площади ускорения является мерой запаса динамической устойчивости системы и может быть названо коэффициентом запаса устойчивости:
, то генератор выпал бы из синхронизма. Отношение возможной площади торможения к площади ускорения является мерой запаса динамической устойчивости системы и может быть названо коэффициентом запаса устойчивости:  .
.
Когда возможная площадь торможения получается меньше площади ускорения, нередко все же оказывается возможным добиться устойчивой работы, если достаточно быстро отключить поврежденную цепь. Мощность, которую можно передать по второй, оставшейся в работе цепи (рис.1), обычно больше, чем та, которую можно передавать по двум цепям при наличии к.з. Уравнение мощности при отключении поврежденной цепи получает следующий вид:
где 
Характеристика мощности при отключении поврежденной цепи показана на рис. 5 в виде кривой III. Кривые I и II на рис.5 представляют собой
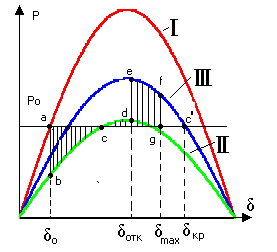 |
характеристики при нормальном режиме и при к.з. соответственно.
Рис.5. Определение предельного угла отключения по правилу площадей
Как указывалось выше (см.с. 6-7), в начальный момент времени к.з. передаваемая мощность падает и ротор начинает ускоряться. Пусть в некоторой точке происходит отключение поврежденной цепи. В момент отключения к.з. характеристика мощности скачком переходит в точку  на кривой III, и в результате отдаваемая генераторами мощность значительно повышается. Благодаря этому максимально возможная площадь торможения (ограниченная кривой
на кривой III, и в результате отдаваемая генераторами мощность значительно повышается. Благодаря этому максимально возможная площадь торможения (ограниченная кривой  ) получается больше, чем при длительном неотключенном к.з., и это увеличение тем больше, чем раньше происходит отключение, то есть чем меньше угол
) получается больше, чем при длительном неотключенном к.з., и это увеличение тем больше, чем раньше происходит отключение, то есть чем меньше угол  .
.
Таким образом, быстрая ликвидация аварий может значительно повысить устойчивость системы. Благодаря своей простоте и большому эффекту быстрая ликвидация аварий находит широкое применение и является по существу основным мероприятием, служащим для повышения динамической устойчивости.
С помощью рис.5, пользуясь правилом площадей, можно графически найти предельное значение угла  , при котором нужно произвести отключение поврежденной линии для того, чтобы добиться устойчивой работы. Значение этого угла определяется равенством площади ускорения и возможной площади торможения.
, при котором нужно произвести отключение поврежденной линии для того, чтобы добиться устойчивой работы. Значение этого угла определяется равенством площади ускорения и возможной площади торможения.
Предельный угол отключения может быть найден и аналитически (при условии, что характеристики мощности генератора во всех режимах имеют синусоидальный характер). Действительно, приравнивая нулю сумму площади ускорения и максимально возможной площади торможения, получаем:

 (5)
(5)
где  и
и  - амплитуды характеристик мощности при к.з. и отключении цепи.
- амплитуды характеристик мощности при к.з. и отключении цепи.
Уравнение (5) дает:


откуда
 (6)
(6)
где все углы выражены в радианах.
Подставляя в (6)  и
и  , можно найти угол
, можно найти угол 
Однако для практических целей этого недостаточно. Для того чтобы предъявить к выключателям и к релейной защите те или иные требования в отношении скорости отключения, необходимо знать не только угол  , но и тот промежуток времени, в течение которого ротор успевает достигнуть этого угла, то есть так называемое предельно допустимое время отключения к.з.
, но и тот промежуток времени, в течение которого ротор успевает достигнуть этого угла, то есть так называемое предельно допустимое время отключения к.з.
С помощью правила площадей определить время отключения невозможно, и для этой цели приходится прибегнуть к другому методу анализа динамической устойчивости, а именно к методу последовательных интервалов.
Метод последовательных интервалов
Метод последовательных интервалов представляет собой способ численного решения дифференциальных уравнений, описывающих переходные электромеханические процессы, является наиболее общим методом практического анализа динамической устойчивости. Его достоинством является то обстоятельство, что он дает картину протекания процесса во времени и благодаря этому позволяет ввести в расчет факторы, влияние которых зависит от времени.
Возникающий при к.з. избыток мощности  сообщает ротору некоторое ускорение
сообщает ротору некоторое ускорение  . Значение этого ускорения в относительных единицах пропорционально избыточному моменту
. Значение этого ускорения в относительных единицах пропорционально избыточному моменту  и обратно пропорционально постоянной инерции
и обратно пропорционально постоянной инерции  :
:  , или с учетом того, что при небольших изменениях скорости
, или с учетом того, что при небольших изменениях скорости 
 (7)
(7)
Ускорение (опуская индекс « ») в этом уравнении представляет собой не что иное как вторую производную от угла по времени, то есть можно записать:
») в этом уравнении представляет собой не что иное как вторую производную от угла по времени, то есть можно записать:  Что же касается величины
Что же касается величины  , она равна разности между мощностью первичного двигателя и мощностью, отдаваемой генератором в сеть:
, она равна разности между мощностью первичного двигателя и мощностью, отдаваемой генератором в сеть:

где амплитудное значение  при нормальном режиме, при к.з. и отключении поврежденной цепи принимает различные значения.
при нормальном режиме, при к.з. и отключении поврежденной цепи принимает различные значения.
Таким образом, выражение (7) можно записать следующим образом:
 (8)
(8)
Решение этого уравнения в форме  дает картину изменения угла во времени и позволяет установить, останется машина в синхронизме или нет.
дает картину изменения угла во времени и позволяет установить, останется машина в синхронизме или нет.
Уравнение (8) нелинейно и не может быть решено в общем виде (за исключением частного случая, когда  Задачу приходится решать методами численного интегрирования. Одним из них является рассматривамый метод последовательных интервалов, с помощью которого задача решается в конечных приращениях.
Задачу приходится решать методами численного интегрирования. Одним из них является рассматривамый метод последовательных интервалов, с помощью которого задача решается в конечных приращениях.
Для этого весь переходный процесс разбивается на ряд небольших интервалов времени  , и для каждого из этих интервалов последовательно вычисляется приближенное значение приращения
, и для каждого из этих интервалов последовательно вычисляется приближенное значение приращения 
В момент к.з. отдаваемая генераторами мощность падает и возникает некоторый избыток мощности  Для достаточно малого интервала времени можно допустить, что избыток мощности в течение этого интервала остается неизменным. Тогда по формулам равномерно ускоренного движения вычисляют приращение скорости машины
Для достаточно малого интервала времени можно допустить, что избыток мощности в течение этого интервала остается неизменным. Тогда по формулам равномерно ускоренного движения вычисляют приращение скорости машины  и угла
и угла 
в течение первого интервала:
 .
.
Относительная скорость машины в начальный момент к.з. равна нулю, и поэтому относительная скорость  в конце первого интервала равна приращению скорости в течение этого интервала, то есть
в конце первого интервала равна приращению скорости в течение этого интервала, то есть 
Ускорение  может быть вычислено из (7):
может быть вычислено из (7):  , следовательно, для первого интервала времени можно записать:
, следовательно, для первого интервала времени можно записать:
 , (9)
, (9)
здесь угол и время выражены в радианах (то есть в относительных единицах).
В практических расчетах удобнее пользоваться выражением угла в градусах, а времени в секундах:
 (10)
(10)
Используя соотношения (10) и принимая во внимание, что  получаем:
получаем:
 , (11)
, (11)
где угол выражен в градусах, а время и постоянная инерции – в секундах.
Обозначая далее  получим окончательно для приращения угла в течение первого интервала времени:
получим окончательно для приращения угла в течение первого интервала времени:
 . (12)
. (12)
Зная приращение угла в первом интервале времени, можно найти абсолютное значение угла в конце этого интервала, или, что то-же самое, в начале следующего интервала:
Для нового значения угла  можно опять определить избыток мощности
можно опять определить избыток мощности  во втором интервале времени по формуле:
во втором интервале времени по формуле:
 ,
,
или воспользоваться для этой цели характеристикой мощности в зависимости от угла. Избыток мощности создает во втором интервале пропорциональное ему ускорение  При вычислении приращения угла
При вычислении приращения угла  в течение второго интервала (а также всех последующих) помимо действующего в этом интервале ускорения
в течение второго интервала (а также всех последующих) помимо действующего в этом интервале ускорения  необходимо учесть и относительную скорость ротора:
необходимо учесть и относительную скорость ротора:
 (13)
(13)
Значение скорости в конце первого интервала времени, получаемое из формулы  является несколько неточным, так как в действительности избыток мощности
является несколько неточным, так как в действительности избыток мощности  и ускорение
и ускорение  не являются постоянными в течение первого интервала времени. Более точные результаты можно получить, если предположить, что ускорение в первом интервале будет равным среднему значению:
не являются постоянными в течение первого интервала времени. Более точные результаты можно получить, если предположить, что ускорение в первом интервале будет равным среднему значению:
 .
.
Тогда относительная скорость в конце первого интервала времени  , и, подставляя это значение
, и, подставляя это значение  в уравнение (13), найдем:
в уравнение (13), найдем:
 (14)
(14)
Теперь можно определить угол к концу второго интервала времени  вычислить избыток мощности
вычислить избыток мощности  и приращение угла
и приращение угла  и т.д.
и т.д.
Аналогично поступая, для  -го интервала времени можно записать:
-го интервала времени можно записать:
 .
.
Значение интервала времени  при ручном счете принимают обычно равным 0,05 с. Если можно ожидать, что амплитуда колебаний будет невелика, то эта цифра без большого ущерба для точности может быть взята равной 0,1 с.
при ручном счете принимают обычно равным 0,05 с. Если можно ожидать, что амплитуда колебаний будет невелика, то эта цифра без большого ущерба для точности может быть взята равной 0,1 с.
Расчет методом последовательных интервалов ведется до тех пор, пока угол не начнет уменьшаться или пока не будет ясным, что угол беспредельно возрастает, то есть машина выпадает из синхронизма.
Метод последовательных интервалов применяют совместно с правилом площадей. С помощью этих двух методов можно найти максимально допустимое время отключения к.з.
Для этого, пользуясь правилом площадей, определяют предельный угол  , при котором должно произойти отключение к.з. и с помощью метода последовательных интервалов вычисляют время, в течение которого ротор достигает угла . Этот промежуток времени дает предельно допустимое время отключения к.з.
, при котором должно произойти отключение к.з. и с помощью метода последовательных интервалов вычисляют время, в течение которого ротор достигает угла . Этот промежуток времени дает предельно допустимое время отключения к.з.

