2015-06-05
2015-06-05 552
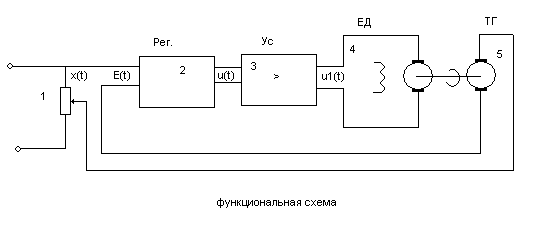
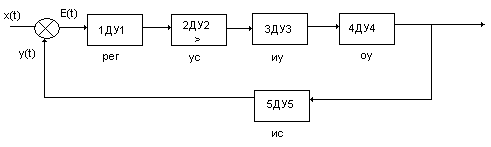
552Расчет и проектирование САУ обычно начинается с качественного содержательного описания фактического алгоритма работы системы, т.е. Функциональной схемы (ФС). Недостаток – отсутствие количественных характеристик.
На основе ФС разрабатываются математические модели или операторы системы.
Математическая модель – это формальное описание системы с помощью математических средств: D, U, разностных алгебраических уравнений, неравенств, множеств и т.д.
Пусть X и Y – множества (векторы) входных сигналов САУ.
Если каждому значению  , ставится в соответствие определенное значение
, ставится в соответствие определенное значение  , то говорят, что задан системный оператор А.
, то говорят, что задан системный оператор А.
Операторское уравнение (*) является математической моделью т.к. устанавливает количественную связь между входом X(t) и выходом Y(t) системы.
Принципиально важно знать, как построить оператор системы А. Как правило операторное управление принадлежит к классу ДУ или эквивалентных ИУ.
Вначале составляют ДУ элементов или звеньев системы
Схема системы, в которой указали математические модели ее элементов (например в форме ДУ) называется структурной.
Совокупность всех управлений элементов и дает уравнение системы в целом. Принцип усложнения модели!!!
Дифференциальные уравнения физических систем (Принцип аналогии)
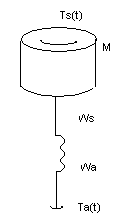
Ta(t)-Ts(t)=0 mпруж=0
Ta(t)=Ts(t)
Момент передается сквозь упругий элемент (сквозная переменная)
W(t)=Ws(t)-Wa(t)
Угловая скорость одного конца пружины относительно другого (относительная переменная).
скв. пер.: F,T,i,Q,q
отн. перем: V,w,U,P,t,θ0
C накоп. С,M,J,Cf,Ct
Lнакопители L, 1/k
Рассеиватели R,b,Rt,Rf
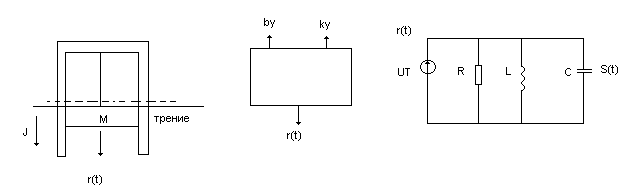
Трение
Если груз сместить в нач положение у(t)=у(0) и затем отпустить
То ур-е движения у(t)=K1(t)e-a1t sin 
При r(t)=I
Для RLC- цепи 
Сходного: