 2015-06-24
2015-06-24 358
358При устройстве реле и датчиков с промежуточным механическим преобразованием воспринимающие органы, получая энергию от внешних входных воздействий, создают тяговые силы. Зависимость тяговых сил от хода подвижных частей воспринимающих органов x и величины внешнего входного воздействия Х называют тяговой характеристикой  . При своем перемещении подвижные частиц встречают сопротивление, создаваемое силами реакции исполнительных и промежуточных органов
. При своем перемещении подвижные частиц встречают сопротивление, создаваемое силами реакции исполнительных и промежуточных органов
 (рис.3).
(рис.3).
Обычно усилия реакции  приводят к точке, где действуют тяговые силы и зависимость (механических) приведенных усилий реакции исполнительных и промежуточных органов от хода подвижных частей воспринимающих органов называют механической (нагрузочной) характеристикой. В зависимости от согласования тяговых механических характеристик элемента можно получить непрерывную или релейную характеристики управления.
приводят к точке, где действуют тяговые силы и зависимость (механических) приведенных усилий реакции исполнительных и промежуточных органов от хода подвижных частей воспринимающих органов называют механической (нагрузочной) характеристикой. В зависимости от согласования тяговых механических характеристик элемента можно получить непрерывную или релейную характеристики управления.
На рис.3, в приведены тяговые и механические характеристики для реле.
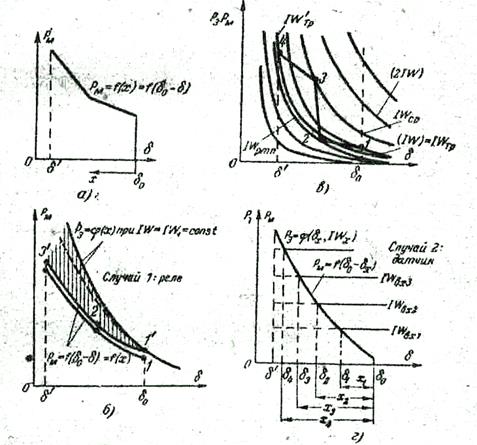
Рис.3
Для правильной работы реле необходимо, чтобы тяговая характеристика при рабочем значении воздействующей (входной) величины (тока, напряжения и т. д.) лежала во всех точках выше механической, т. е.

при  <x<
<x<  , где - начальное, а - конечное значение воздушного зазора, х - перемещение.
, где - начальное, а - конечное значение воздушного зазора, х - перемещение.
При некотором значении воздействующей входной величины, например, точка  , значение тяговых сил
, значение тяговых сил  станет равным механическим
станет равным механическим  при
при  и подвижная система при необходимом увеличении
и подвижная система при необходимом увеличении  начнет свое движение. Это значение
начнет свое движение. Это значение  носит название величины (параметра) трогания реле при срабатывании (тока, н. с., напряжения или мощности трогания - для электрических реле; температуры трогания - для тепловых реле и т. п.).
носит название величины (параметра) трогания реле при срабатывании (тока, н. с., напряжения или мощности трогания - для электрических реле; температуры трогания - для тепловых реле и т. п.).








