 2015-07-04
2015-07-04 1138
1138(ПРИВЕДЕНИЕ НЕЛИНЕЙНЫХ ЦЕПЕЙ К ЛИНЕЙНЫМ)
Если продолжать линейный участок h-b-a (см. рис. 1)характеристики до пересечения с осью напряжения, то он пересечёт её в точке f.
Отрезок  в принятом масштабе напряжений выражает постоянное напряжение U0. Нетрудно заметить, что в любой точке h прямолинейной части вольтамперной характеристики напряжение складывается из постоянного напряжения U0 и изменяющейся части, определяемой произведением тока и динамического сопротивления, т. е. прямая
в принятом масштабе напряжений выражает постоянное напряжение U0. Нетрудно заметить, что в любой точке h прямолинейной части вольтамперной характеристики напряжение складывается из постоянного напряжения U0 и изменяющейся части, определяемой произведением тока и динамического сопротивления, т. е. прямая  выражается уравнением
выражается уравнением
U = U0 + IRДИН (3)
На основании уравнения (3) нелинейный элемент можно представить схемой последовательного соединения ЭДС Е0 — U0 и динамического сопротивления RДИН (рис. 1, б). При этом
U = Е0 + IRДИН
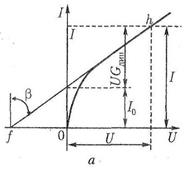
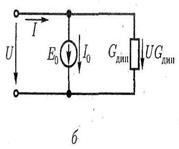
Рис. 12. а - схему замещения можно получить для нелинейного элемента с вольтамперной характеристикой, обращенной выпуклостью к оси токов; б – схема замещения нелинейного элемента параллельно соединёнными источником тока и динамической проводимостью
Аналогичную схему замещения можно получить для нелинейного элемента с вольтамперной характеристикой, обращенной выпуклостью к оси токов (рис. 12, а). ЭДС Е0 в этом случае будет направлена по направлению тока. На примере данной характеристики покажем, что нелинейный элемент можно представить схемой параллельного соединения источника тока и динамической проводимости GДИН.
В линейной части характеристики ток можно представить в виде суммы
I = I0 + UGДИН (4)
Этому равенству соответствует схема замещения рис. 12, б.
После замены нелинейных элементов эквивалентными схемами замещения с линейными элементами нелинейную цепь можно рассчитать одним из методов, применяемых для расчета линейных цепей.








