 2015-07-14
2015-07-14 438
438| Обозначения | n = 1 | n = 2 | n = 3 | n = 4 |
| m | 0,348 м | 0,255 м | 0,258 м | 0,260 м |
| Q11 | 0,746 | 0,500 | 0,453 | 0,504 |
| Q22 | 1,045 | 0,999 | 1,020 | 1,041 |
| Q12 | - 0,0156 | - 0,0134 | - 0,0205 | - 0,0275 |
| a | 0,346 м | 0,255 м | 0,261 м | 0,265 м |
| b | 0,312 | 0,180 | 0,174 | 0,184 |
| Q | 113° 06¢ | 91° 54¢ | 92° 04¢ | 92° 55¢ |
| M | 0,466 м | 0,312 м | 0,314 м | 0,323 м |
Если выполнялось уравнивание геодезической сети методом Ньютона при n = 2, то
 ,
,
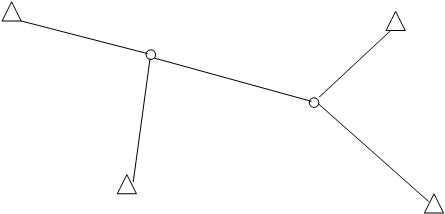
где Н-1(X(j)) ¾ обратная матрица Гессе в j-ом приближении. Если n ¹ 2, то вектор  , входящий в формулу (4.20), можно получить по (3.10), изменяя в процессе вычисления матрицы F только вектор ÑF(X(j)). Если n = 1, то методом Ньютона воспользоваться нельзя, и только в этом случае для определения вектора , входящего в формулу (4.20), необходимо выполнять уравнивание геодезической сети многогрупповым способом столько раз, чему равно число измерений. Рассмотрим уравнивание и оценку точности сети трилатерации (рис.4.6) с координатами исходных пунктов:
, входящий в формулу (4.20), можно получить по (3.10), изменяя в процессе вычисления матрицы F только вектор ÑF(X(j)). Если n = 1, то методом Ньютона воспользоваться нельзя, и только в этом случае для определения вектора , входящего в формулу (4.20), необходимо выполнять уравнивание геодезической сети многогрупповым способом столько раз, чему равно число измерений. Рассмотрим уравнивание и оценку точности сети трилатерации (рис.4.6) с координатами исходных пунктов:
x1 = 16 000 м; у1 = 11 500 м; x2 = 11 000 м; у2 = 14 000 м;
x3 = 16 500 м; у3 = 20 000 м; x4 = 12 000 м; у4 = 23 000 м
и длинами сторон:
S1 = 4 123,106 м; S2 = 4 272,002 м; S3 = 3 354,102 м; S4 = 3 354,102 м;
S5 = 4 743,416 м; при sS = 0,01 м.
 1 3
S1
S3 S4
S5
Рис4.6. Сеть трилатерации
1 3
S1
S3 S4
S5
Рис4.6. Сеть трилатерации
|
Уравненные координаты пунктов 5 и 6 при различных даны в табл. 4.9.
Таблица 4.9








