 2015-07-14
2015-07-14 1080
1080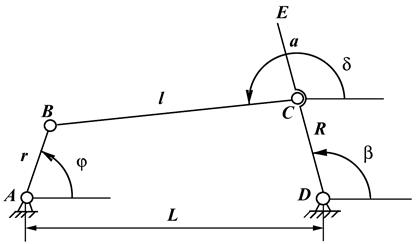
Рис.4.4
Запишем уравнения проекций контура механизма АВСD на горизонтальную и вертикальную оси для произвольного положения входного звена механизма (рис.4.4):

 (4.8)
(4.8)
Разделив обе части каждого уравнения на r и произведя перестановки членов каждого уравнения, получим:
 (4.9)
(4.9)
Введем безразмерные коэффициенты отношения длин:
шатуна и кривошипа  ;
;
коромысла и кривошипа  ;
;
стойки и кривошипа  .
.
Тогда:

 . (4.10)
. (4.10)
Возведя левые и правые части уравнений в квадрат и складывая их, после преобразования получим:

Обозначив 

 (4.11)
(4.11)
получим:  (4.12)
(4.12)
Для трех заданных положений механизма получим систему линейных уравнений:
 (4.13)
(4.13)
Так как в данной системе число неизвестных равно числу уравнений, то решением системы будет:



где
 – определитель системы; (4.14)
– определитель системы; (4.14)
D1, D2, D3 – определители, получаемые из (4.14) заменой столбца, составленного из коэффициентов при соответствующем неизвестном, столбцом, составленным из свободных членов:
 ;
;
 ;
;
 .
.
Задавшись длиной одного звена (например, кривошипа), можно определить длины остальных звеньев механизма. Полученные размеры звеньев проверяются по условию существования кривошипно-коромыслового механизма (правило Грасгофа).








