 2015-08-21
2015-08-21 672
672Кинематическая схема механического узла контактной системы электромеханического реле с одной парой замыкающихся контактов представлена на рис. 1.51.
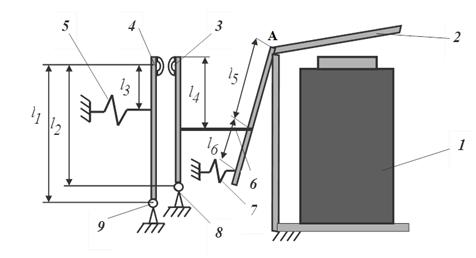
Рис. 1.51. Кинематическая схема контактной системы реле с замыкающимися контактами.
Реле состоит из электромагнита 1 с якорем-рычагом 2, подвижных контактов 3,4, пружин 5,7 и рейки 6. При включении реле якорь 2 за счет возникающих сил притягивается к полюсу электромагнита и рейкой 6 перемещает контакт 3 до касания с контактом 4 и далее до расчетного значения провала контакта 3. Пружина 6 обеспечивает возврат якоря и контакта 3 в исходное положение при выключении тока в электромагните. Пружина 5 создает необходимое усилие нажатия контактов в замкнутом состоянии и возврат контакта 4 в исходное положение при выключении реле. Якорь – рычаг совершает вращательное движение относительно точки А, а контакты – относительно опор вращения 8, 9. В случае консольного закрепления упругих контактов анализ динамики движения также может быть сведен к рассматриваемой кинематической схеме, если определить эквивалентные значения моментов инерции контактов и их жесткостей.
Для обоснования модели удобно сначала построить граф кинематической схемы в предположении сведения вращения элементов к одной оси вращения. Обозначим 1 – якорь электромагнита; 2 – контакт 1; 3 – контакт 2; 0 – неподвижную точку отсчета для вращательного движения. Тогда граф упрощенной приведенный к одной оси вращения кинематической схемы контактной системы реле примет вид рис. 1.52.
Рис. 1.52. Приведенный к одной оси вращения граф контактной системы реле с замыкающимися контактами.
Якорь представлен действующим на него электромагнитным моментом Мя, моментом инерции Jя, трением в опоре вращения Тря, возвратной пружиной Пр1 и двухсторонним упором, ограничивающим движение якоря Упоря. Якорь соединен жестким штоком с первым контактом, у которого по отношению к оси вращения определены момент инерции Jк1 и трение в опоре вращения Трк1. Зазор между первым и вторым контактом моделируется односторонним упором Упорк1-к2. Второй контакт имеет момент инерции Jк2, трение Тр2 и поджимную пружину Пр2.
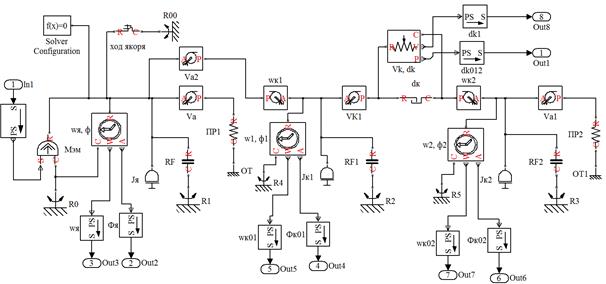
Рис. 1.53. Модель контактной системы реле с замыкающимися контактами.
В Simscape Mechanical модель контактной системы реализована следующим образом (рис. 1.53). Управляемый по входу In1 источник электромагнитного момента М эм подключен к моменту инерции якоря J я, элементу трения вращения RF, к двухстороннему упору – ограничителю угла хода якоря, через преобразователь вращательного движения в поступательное V a с плечом  к пружине ПР1. Далее следует последовательное преобразование вращательного движения якоря в поступательное V a2 с плечом
к пружине ПР1. Далее следует последовательное преобразование вращательного движения якоря в поступательное V a2 с плечом  и поступательного движения во вращательное движение первой контактной пластины wk1 с плечом
и поступательного движения во вращательное движение первой контактной пластины wk1 с плечом  . В этой точке следует подключение момента инерции первой контактной пластины J к1 и трения вращения контакта RF1. Зазор между контактами представлен линейным упором dk, который подключен через преобразователь вращательного движения первой контактной пластины в поступательное с плечом
. В этой точке следует подключение момента инерции первой контактной пластины J к1 и трения вращения контакта RF1. Зазор между контактами представлен линейным упором dk, который подключен через преобразователь вращательного движения первой контактной пластины в поступательное с плечом  . За этим упором следует преобразование поступательного движения во вращательное второй контактной пластины wk2 с плечом
. За этим упором следует преобразование поступательного движения во вращательное второй контактной пластины wk2 с плечом  и соединение с моментом инерции J к2 и элементом трения RF2 этой пластины. Для присоединения линейной пружины ПР2 ко второй контактной пластине ее вращательное движение преобразуется к поступательному V a1 с плечом
и соединение с моментом инерции J к2 и элементом трения RF2 этой пластины. Для присоединения линейной пружины ПР2 ко второй контактной пластине ее вращательное движение преобразуется к поступательному V a1 с плечом  . В схему также включены измерители угловых скоростей и углов якоря и контактов: Out3, Out2, Out5, Out4, Out7, Out6, относительной линейной скорости и зазора контактов: Out8, Out1.
. В схему также включены измерители угловых скоростей и углов якоря и контактов: Out3, Out2, Out5, Out4, Out7, Out6, относительной линейной скорости и зазора контактов: Out8, Out1.
В качестве примера зададим следующие значения параметров механического узла контактной системы: моменты инерции якоря J я= 6.34e-4 к г м2, первой и второй контактных пластин J к1=2.26e-6 к г м2, J к2 =2.5e-6 к г м2 , трение во всех опорах (незначительное) k тр=0.001 к г /с, жесткость возвратной пружины якоря ПР1 k у=300 Н/м, предварительное поджатие -0.006 м, жесткость опорной пружины второго контакта ПР2 k у=3000 Н/м, предварительное поджатие 0 м, ход якоря  , зазор между контактами 3 мм.
, зазор между контактами 3 мм.
Для расчета статической механической характеристики контактной системы из эквивалентной схемы рис. 1.53 убираются инерционные элементы и задается линейно нарастающий момент, действующий на якорь электромагнита (рис. 1.54). С целью сокращения времени анализа следует увеличить трение деталей. При этом сокращается постоянная времени переходных процессов.
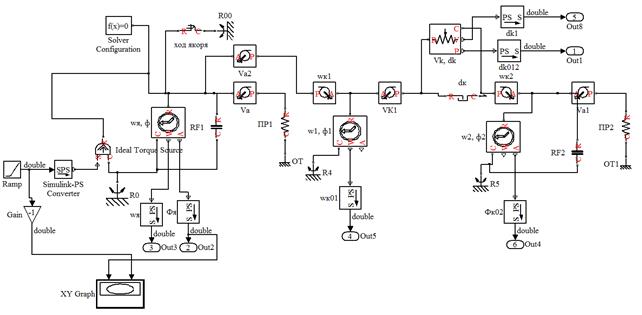
Рис. 1.54. Эквивалентная схема для расчета статической механической характеристики контактной системы реле с замыкающимися контактами.
Рассчитанная статическая механическая характеристика для рассматриваемого примера в виде зависимости момента якоря от угла его поворота приведена на рис. 1.55.
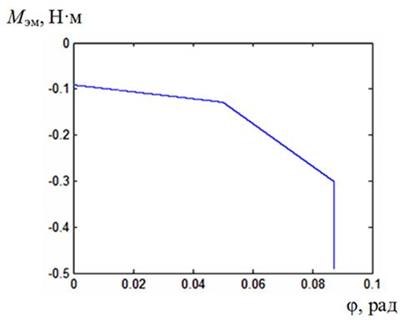
Рис. 1.55. Статическая механическая характеристика контактной системы реле с замыкающимися контактами и жесткой связью якоря с первым контактом.
Поворот якоря начинается после увеличения прикладываемого момента больше, чем момент предварительно поджатой возвратной пружины якоря. Затем момент увеличивается пропорционально углу поворота якоря в соответствии с упругими свойствами возвратной пружины до касания контактов. Последующее увеличение момента при повороте якоря пропорционально суммарной жесткости возвратной пружины и пружины второго контакта. Движение продолжается до достижения упора якоря и далее момент растет при неизменном положении якоря.
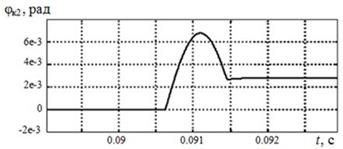
Анализ динамики работы контактной системы реле удобно выполнить при воздействии на якорь момента в форме прямоугольного импульса. На рис. 1.56 представлены осциллограммы момента, углов поворота якоря и первой контактной пластины, угла поворота второй контактной пластины. Начальное положение якоря определено углом  (0.0524 рад.), что соответствует начальному положению первой контактной пластины с углом
(0.0524 рад.), что соответствует начальному положению первой контактной пластины с углом  . В период времени до включения электромагнита под действием момента, создаваемого предварительно поджатой возвратной пружины, якорь поворачивается на угол
. В период времени до включения электромагнита под действием момента, создаваемого предварительно поджатой возвратной пружины, якорь поворачивается на угол  до упора с углом
до упора с углом  (0.14 рад.), а первая контактная пластина поворачивается вправо на угол
(0.14 рад.), а первая контактная пластина поворачивается вправо на угол  . Затем при включении электромагнита под действием возникающего электромагнитного момента якорь, преодолевая противодействующие моменты возвратной пружины и контактной системы, переходит в положение с углом
. Затем при включении электромагнита под действием возникающего электромагнитного момента якорь, преодолевая противодействующие моменты возвратной пружины и контактной системы, переходит в положение с углом  , первая контактная пластина – в положение
, первая контактная пластина – в положение  (0.0655 рад.), вторая контактная пластина - в положение
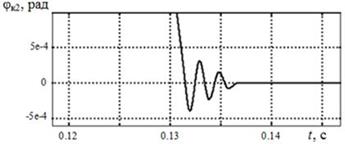
(0.0655 рад.), вторая контактная пластина - в положение  (2.8e-3 рад.). Таким образом, угол поворота контакта составляет или 0.14 мм. В момент касания контактных пластин происходит короткий отскок второй пластины до угла 7.0e-3 рад. (см. рис. 1.56, б) При размыкании контактов наблюдается дребезг (см. рис. 1.56, в).
(2.8e-3 рад.). Таким образом, угол поворота контакта составляет или 0.14 мм. В момент касания контактных пластин происходит короткий отскок второй пластины до угла 7.0e-3 рад. (см. рис. 1.56, б) При размыкании контактов наблюдается дребезг (см. рис. 1.56, в).
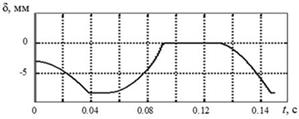
На рис. 1.57 показано изменение расстояния между контактами. Начальный зазор составляет 3 мм.
 а)
а)
|
 б)
б)
 в)
в)
|
Рис. 1.56. Осциллограммы: а - импульса момента, угла поворота якоря и первой контактной пластины, угла поворота второй контактной пластины; б, в - увеличенные осциллограммы угла поворота второй пластины.
 а)
а)
|  б)
б)
|
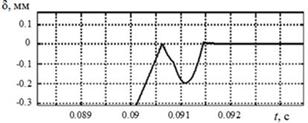
Рис. 1.57. Осциллограммы расстояния между первой и второй контактной пластиной: а - весь период работы; б - момент касания (увеличено).
В момент времени, непосредственно предшествующий включению электромагнита, расстояние между контактами увеличивается до 8.24 мм. При срабатывании реле расстояние уменьшается до нуля. При этом наблюдается отскок на 2 мм.
По осциллограммам определяется время срабатывания реле - 0.035 с и время отпускания - также 0.035 с.








