 2015-08-13
2015-08-13 425
425Существует множество различных способов перемещения роботов:
На колесах – на 2, 3, 4, 6 и более колесах.(2)
 Рисунок 2
Рисунок 2
|  Рисунок 3
Рисунок 3
|
На 2 ногах
 Рисунок 4
Рисунок 4
|
На нескольких конечностях
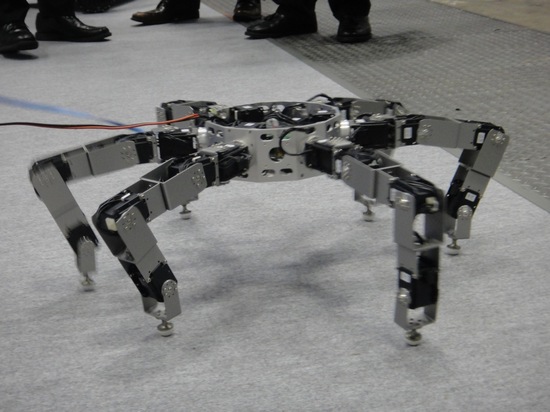 Рисунок 5
Рисунок 5
|
На гусеницах
 Рисунок 6
Рисунок 6
| По рельсам
 Рисунок 7
Рисунок 7
|
По воздуху
 Рисунок 8
Рисунок 8
| Под водой
 Рисунок 9
Рисунок 9
|
Т.к. робот-архивариус должен перемещаться по ровной поверхности, где не требуется преодолевать препятствия, то был выбран робот на трех колесах - два ведущих колеса и одно поворотное.
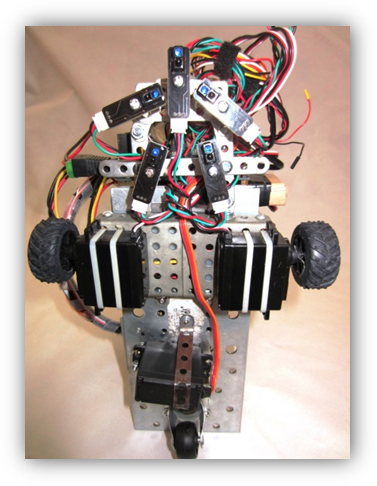
Рисунок 10. Колесная база.








