 2015-08-13
2015-08-13 2784
2784Моделирование с помощью программы COMSOL Multiphysics отлично подходит для образовательных и исследовательских целей. В прошлой версии программы (COMSOL 3.3) было возможно конвертировать модель в программу MATLAB/Simulink. Это было отличное решение для контроля проектирования и динамики моделирования. На данный момент связь с MATLAB возможна только через пакет программы MATLAB. В этом случае проектируемый контроллер и моделирование замкнутой системы могут быть реализованы двумя способами:
а) напрямую в программе COMSOL Multiphysics - это требуется для включения динамики движения и уравнений контроллера в пакете программы COMSOL.
б) с помощью пакета MATLAB - использовать m-файл модели программы
COMSOL для расчета модели.
Использование COMSOL Multiphysics в левитационной задаче дает множество возможностей, из-за особенностей этой программы, например таких как:
а) общее мультифизическое моделирование.
б) опция перемещения сетки решателя.
в) уравнения полного дифференциала (УПД).
г)возможность включать линейные и нелинейные формулы.
д) моделирование в 2D, 3D и ассиметричный режим.
е) способность включать электрическую цепь.
Модель двойного электромагнита для АМЛ была реализована на симметричной оси модифицированной конструкции реального лабораторного оборудования (MLS2EM). Были сконструированы два цилиндрических электромагнита и сферический ферромагнетик левитировал между этими двумя электромагнитами. Положение сферы определяется оптических сенсором. Модель такой системы содержит:
а) геометрию компонентов, свойства позиционера - идентичный реальной системе.
б) динамику движения, описанную УПД.
в) управление движением одного и/или обоих электромагнитов для достижения левитации под внешним возбуждением, различные способы управление и режим раздельного управления.
Реализованная в программе COMSOL Multiphysics модель представлена на рис.2.
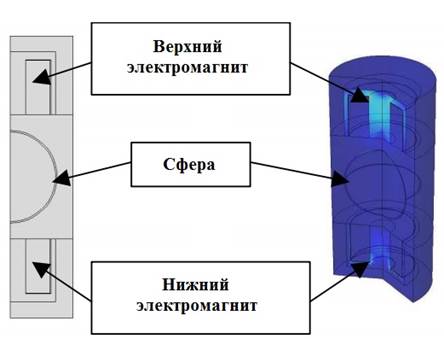
Рисунок 2. Ассиметричная модель двойного электромагнита для САМЛ смоделированная в COMSOL Multiphysics.








