 2015-08-13
2015-08-13 598
598Наиболее часто используются системы преобразователя постоянный ток, что увеличивает помехоустойчивость таких систем. Они обеспечивают передачу информации на несколько км. В качестве источника информации могут выступать ПИП (первичный измерительный преобразователь (превращает изменение ф.-х. параметра образца в электрический сигнал)) всех видов.
Преобразователь «сила – ток»
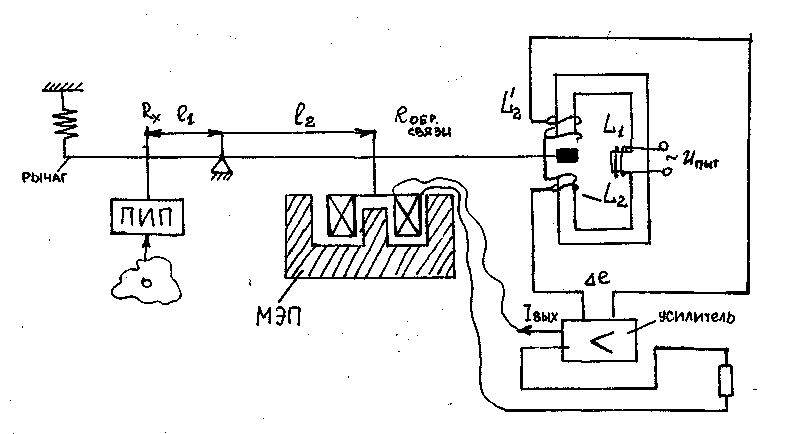
В основу работы преобразователя положен принцип силовой компенсации. Измеренный параметр преобразуется в усилие Rx, которое воздействует на рычаг и уравнивается усилием обратной связи Roc, которое разв-ся магнито-электрическим преобразователем элемента (МЭП). МЭП состоит из постоянного магнита с п-образным магнитопроводом. В зазоре магнитопровода расположена катушка, жестко закрепленная на рычаге.
ИПР – индикатор перемещения рычага.
Обмотка на катушке подключена к токовому выходу усилителя. Ход усилителя соединен со вторичными обмотками L2 и L´2 ИПР. На первичную обмотку L1 подано напряжение питания. При изменении значения параметра изменяется Rx и равновесие рычажной системы нарушается, что приводит к перемещению рычага относительно точки О. На конце рычага перемещается сердечник из магнитомягкого материала. Перемещение сердечника преобразуется ИПРом в сигнал ∆е.
∆е = UL2 – UL´2
Усилитель усиливает ∆е и преобразует в пропорциональное изменение тока выхода усилителя (I вых). I вых протекает на катушке МЭПа. В результате возникает усилие обратной связи Roc.
Roc = B· l· n· I вых
B – магнитная индукция
l – длина витка
n – количество витков
Уравнение равновесия рычажной системы
I вых = Rx· l1 / l2· B· l· n, Rx· l1 = Roc ·l2
Статическая характеристика преобразователя зависимость: I от усилия.








