 2015-09-07
2015-09-07 7052
7052
Разгонный блок КВРБ(КВТК)
Государственный космический научно-производственный центр имени М.В.Хруничева ведет разработку кислородно-водородного разгонного блока (КВРБ) (КВТК) для модернизированной ракеты-носителя
"Протон-М" и РКН «Ангара А5». Создание кислородно-водородного разгонного блока базируется на основе разработанного в КБХМ жидкостного ракетного двигателя КВД-1.
Конструкция разгонного блока позволяет выполнять длительный полет в условиях космического пространства (до 7, 5 часов) и осуществлять многократное (до 5 раз) включение маршевого двигателя в процессе полета.
Маршевый двигатель устанавливается неподвижно в конической нише, расположенной на нижнем днище бака окислителя. В качестве маршевого двигателя КВРБ используется модернизированный жидкостный ракетный двигатель КВД-1М с турбонасосной системой подачи топлива и дожиганием генераторного газа в камере сгорания. Для управления КВРБ на активных участках полета используются две рулевые камеры, установленные в кардановых подвесах, допускающих отклонение камер в двух плоскостях. Питание рулевых камер основными компонентами топлива осуществляется от турбонасосного агрегата маршевого двигателя. На нижнем днище бака окислителя установлены два блока двигательной установки малой тяги для стабилизации и ориентации кислородно-водородного блока на пассивных участках полета, а также осадки топлива перед запусками маршевого двигателя. В качестве компонентов топлива в двигательной установке малой тяги используются азотный тетраоксид и несимметричный диметилгидразин.
В составе двигательной установки имеется система регулирования соотношения расходуемых компонентов топлива, которая обеспечивает одновременное и полное расходование топлива из баков. Наддув бака окислителя и управление пневмоклапанами осуществляется гелием, хранящимся в шаробаллонах, расположенных в баке окислителя. Наддув бака горючего осуществляется газообразным водородом, отбираемым от маршевого двигателя.
Конструкция и характеристики КВРБ позволяют использовать его совместно не только с РН "Протон-М", но и с целым рядом существующих и перспективных РН среднего и тяжелого классов "Ангара", "Зенит", "Энергия-М", а также Ariane-5.
Двигатель КВД-1М выполнен по схеме с дожиганием восстановительного генераторного газа. Поддержание и изменение режима работы двигателя по тяге и соотношению массовых расходов компонентов топлива осуществляется при помощи дросселей, установленных на магистралях питания окислителем генератора и камеры. Дросселирующие элементы дросселей перемещаются электрическими приводами по командам от системы управления разгонного блока. Запуск и останов двигателя осуществляется при помощи агрегатов автоматики, управляемых гелием, подаваемым через функционирующие по программе электропневмоклапаны пневмосистемы РБ. В процессе запуска и останова двигателя производится продувка полостей окислителя камеры и газогенератора гелием, подаваемым на изменение режима работы двигателя по тяге и по соотношению массовых расходов компонентов топлива, которое осуществляется при помощи дросселей, установленных на магистралях питания окислителем генератора и камеры. Дросселирующие элементы дросселей перемещаются электрическими приводами по командам от системы управления разгонного блока. Запуск и останов двигателя осуществляется при помощи агрегатов автоматики, управляемых гелием, подаваемым через функционирующие по программе электропневмоклапаны пневмосистемы РБ. В процессе запуска и останова двигателя производится продувка полостей окислителя камеры и газогенератора гелием, подаваемым из пневмосистемы разгонного блока. Воспламенение компонентов топлива в камере и газогенераторе осуществляется при помощи пиротехнических устройств.
Двигатель может работать совместно с бустерными турбонасосными агрегатами окислителя и горючего, создающими необходимые давления компонентов топлива для бескавитационной работы насосов его турбонасосного агрегата. Двигатель снабжен шар-баллоном для раскрутки ТНА при первом запуске ЖРД. Для последующих запусков шар-баллон может быть заполнен водородом высокого давления, отбираемым из выходного коллектора камеры двигателя.
Компоненты топлива - жидкий кислород и жидкий водород. Управляющий газ – гелий. Рп = 7,100тс(69,6кН)
In = 462 с
t = 800 с (одного включения - 600 с)
рк = 57 кгс/см2
ргг = 82,3 кгс/см2
Km = 6,0
птна = 42000 об./мин.
Токисл. = 81 К
Тгор. = 21,9 К
Число включений 3
Мдв. = 282 кг
Dдв. = 1580мм
hдв. = 2140 мм
Начало летных испытании КВРБ с модернизированной РН "Протон-М" проводилось в 2003 г. Рп = 7,503 тс (73,58 кН);In = 461 с.
Количество включений - до 5. Впервые в мире в августе 1997 г. испытан ЖРД на основе КВД-1, в котором вместо жидкого водорода использовался сжиженный природный газ. В двигателе осуществлялось дожигание газогенераторного газа (с избытком горючего) после турбины. Он оснащен системой обеспечения многократного запуска. Специально разработана рулевая камера небольшой тяги, работающая на СПГ и ЖК.
Второе испытание двигателя на СПГ проведено в мае 1998 г. Рулевая камера прошла испытания на 5 включений общей продолжительностью
250 с. Рп = 5,500...6,800 тс (53,92...66,66 кН)
In = 355 с
рк = 3,2...4,4...6,ЗМПа
Km = 2,0...2,2
Для рулевой камеры:
Рп = 200кгс(1,96кН)
Кт = 1,4...1,6
1.4 Разгонный блок «ДМ»
Разгонный блок "ДМ" предназначен для применения на РН
"Протон-К", "Протон-М" и "Зенит-3"и может быть предложен на РКН «Ангара А5». При выведении КА на геостационарную орбиту РН может работать по двух - или трехимпульсной схеме.При этом в зависимости от заданной долготы стояния спутника на геостационарной орбите меняется время нахождения блока на промежуточных орбитах и соответственно общее время полета, которое может составлять от 7 до 21 часа.Во время полета разгонный блок может функционировать или полностью в автономном режиме, или управляться по радиоканалам с Земли.
Основные массово-габаритные параметры блока следующие:
• максимальная длина – 6,28 м;
• диаметр в средней части - 3,7м;
• диаметр по стыку с РН - 4,1 м;
• масса сухого блока без сбрасываемых элементов - 2200 кг;
• масса КРТ и газов - 15095 кг;
в том числе:
• окислитель - жидкий кислород - 10610 кг,
• горючее - керосин (РГ-1) - 4330 кг.
Конструктивно-компоновочная схема блока представлена на рисунке 7. Основным силовым элементом конструкции является межбаковый отсек, к верхнему шпангоуту которого стыкуется ферма крепления приборного контейнера. Эта же ферма используется и для крепления космического аппарата, который устанавливается на кольцевом шпангоуте, расположенном на внутреннем ярусе фермы. Межбаковый отсек в верхней своей части имеет узлы крепления фермы, к которой присоединен шаровый бак окислителя. К нижней части межбакового отсека пристыкована двухъярусная ферма, которая используется для крепления торового бака горючего и маршевого двигателя.
Бак окислителя, в котором размещается жидкий кислород, содержит внутреннюю арматуру, магистрали заправки и слива, наддува и дренажа, указатель наполнения бака при заправке и внутрибаковые перегородки. Внутри бака размещены два шар-баллона с гелием, который используется для наддува баков, продувок, раскрутки турбин бустерных насосных агрегатов и ряда других целей. Внешняя поверхность бака и расходные магистрали закрыты экранно-вакуумной теплоизоляцией (ЭВТИ) и гермочехлом. Внутренняя-полость под чехлом при подготовке к пуску продувается предварительно осушенным азотом и гелием.
Бак горючего имеет торовую форму и размещен в нижней части разгонного блока.Он закреплен на внешнем ярусе двухъярусной фермы и имеет также дополнительное крепление по внутреннему контуру этой фермы. С целью уменьшения остатков незабора компонента бак горючего наклонен относительно продольной оси на 3 градуса. Внешняя ее поверхность частично закрыта ЭВТИ, а на верхнем его днище и на двухъярусной ферме размешены элементы системы управления и системы телеизмерений, а также арматура ПГС двигателя. ЖРД РД-58М многократного запуска, с турбонасосной системой подачи выполнен по схеме с дожиганием окислительного газа. Он закреплен в карданном подвесе на внутреннем ярусе двухъярусной фермы. Такая установка двигателя позволяет производить управление по каналам тангажа и рыскания. Для управления по крену используется поворотное сопло, работающее на горячем генераторном газе, частично отбираемом после турбины ТНА и обеспечивающем работу турбин бустерных насосных агрегатов окислителя и горючего. Последние располагаются непосредственно на выходе из соответствующих баков. В состав ЖРД РД58М входят также блок многократного запуска и агрегаты автоматики с пневмоуправлснием. Кроме того, на блоке "ДМ" установлены два двигателя системы обеспечения запуска, которые закреплены на нижнем днище бака горючего и предназначены для создания начальной осевой перегрузки. Они работают на гидразине и включаются перед запуском основного ЖРД. Для предотвращения теплового воздействия истекающей газовой струи на элементы конструкции и ЖРД используется донная защита, которая представляет собой сваренный из трубок каркас, обтянутый ЭВТИ. Приборный отсек выполнен в виде герметичного торообразного контейнера.Он закреплен на внутреннем и внешнем ярусах верхней фермы. Контейнер изготовлен разъемным и содержит приборы системы управления, а также воздушно-жидкостную систему терморегулирования. Разгонный блок комплектуется коническим и цилиндрическим переходниками, которые связывают его с РН. При отделении РБ от третьей ступени РН конический переходник отделяется вместе со ступенью, а через некоторое время сбрасывается и цилиндрический переходник.
Блок «ДМ» разработан и производится НПО "Энергия», эксплуатируется с РН «Протон» с 1974 года, а его прототип — блок»Д» - с 1967 года.
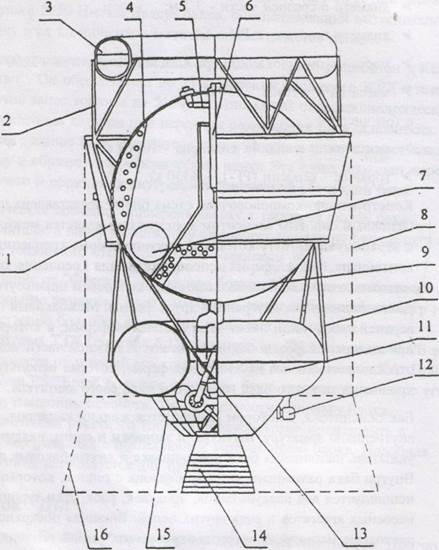
Рисунок 7 - Разгонный блок «ДМ»:
1 - межбаковый отсек; 2 - ферма крепления приборного отсека, 3-приборный отсек, 4 - внутрибаковые перегородки, 5 - патрубок наддува и дренажа, 6 - указатель наполнения бака при заправке, 7 -баллон с гелием; 8 - сбрасываемый переходный отсек; 9 - бак окислителя; 10- двухярусная ферма; 11 - бак горючего; 12 - блок многократного запуска; 13-карданный подвес двигателя; 14-ЖРД РД-58М; 15-донная тепловая защита; 16-конический переходный отсек.
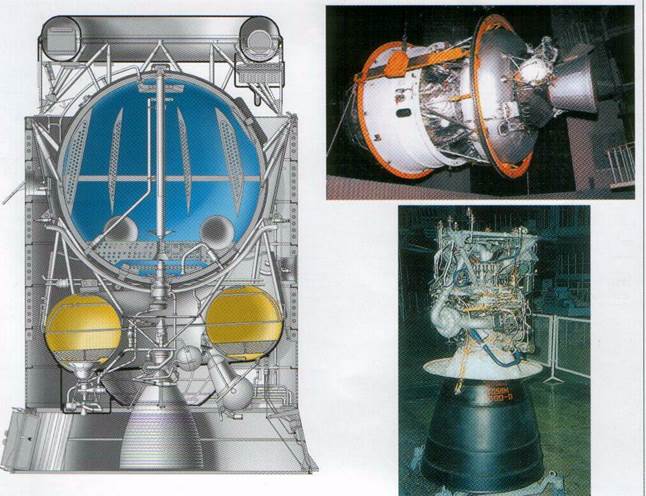
а б
Рисунок 8 - а – конструктивно-компоновочная схема разгонного блока«ДМ»; б – блок «ДМ» в МИКе космодрома на испытаниях
Блок «ДМ» состоит из:
• маршевого двигателя;
• двух двигательных установок стабилизации и ориентации;
• сферического бака окислителя;
• тороидального бака горючего;
• приборного отсека;
• аппаратуры командно-измерительного комплекса;
• отделяемых в полете нижнего и среднего переходников.
Блок «ДМ» существует в двух модификациях: с аппаратурой командно-измерительного комплекса, размещаемой в приборном отсеке, и без нее, когда для решения задач управления и измерения используется аппаратура космического аппарата.
Двигатель 11Д58М является представителем семейства кислородно-углеводородных ЖРД, разработанных НПО "Энергия» (1970-1973 гг.) для разгонных блоков, обеспечивших реализацию большинства национальных программ исследования космоса.
Компоненты топлива:
• окислитель — жидкий кислород с температурой от минус 194 до минус 177° С;
• горючее — нафтил (керосин) или синтин. Подтвержденная надежность двигателя 0,997 при доверительном уровне 0.9. Каждый двигатель проходит контрольные испытания без переборки с использованием прогрессивных средств диагностирования технического состояния.
Жидкостной ракетный двигатель 11Д58М разработан в НПО «Энергия» под руководством Б. А. Соколова. Серийно изготавливается на Воронежском механическом заводе.
Контрольные вопросы
1 Каковы условия полета РБ?
2 В чем отличие конструкции РБ от конструкции РН и КА?
3 Схема выведения КА с помощью РБ.
4 Особенности конструктивного построения РБ «ДМ».
5 Особенности конструктивного построения РБ «Фрегат».
6 Особенности конструктивного построения РБ «Бриз-М».
7 Особенности конструктивного построения блока выведения «Икар».
8 Особенности конструктивного построения блока «И» РН «Молния-М»..
9 Особенности конструктивного построения блока «Л» РН «Молния-М».
Литература
1. Советская космонавтика. М.: Машиностроение, 1981.
2. Военно-космические силы. М.: ЦИПК, 1992.
3. Вольский А.Н. Космодром. М.: ВИМО, 1997.
4. На земле и в космосе. Под редакцией И.В.Бармина. М.: Д.С.»Полиграфикс РПК», 2001.
5. Корнеев Н.М., Неустроев В.Н. Генеральный конструктор В.П.Бармин.М,: 1999.
6. Кожухов В.С., Соловьев В.Н. Комплексы наземного оборудования ракетной техники. М.: АСКОНТ, 1988.
7.Козлов В.В. Основы проектирования ракетно-космических комплексов. М.: Издательство ВИКУ им. А.Ф.Можайского, 1999.
8. Горлин С.М. Экспериментальная аэромеханика. М.: 1970.
9. Попов В.Н., Расторгуев Б.С. Вопросы расчета и конструирования специальных сооружений. М.: Стойиздат, 1980.
10. Евсеев И.М. Опережая время. М.: ООО «Биоинформсервис», 1999.
11. Бирюков Г.П., Кобелев В.Н. Основы построения ракетно-космических комплексов. М.: Издательско-типографский центр МАТИ им. К.Э.Циолковского, 2000.
15. Павлюк Ю.С. Баллистическое проектирование ракет. г.Челябинск, Издательство ЧГТУ, 1996год
16. Пенцак И.Н. Теория полёта и конструкция баллистических ракет. М., Машиностроение, 1974, 344 с.
16. Алифанов О.М., Андреев А,Н., Гущин В.Н. и др. Баллистические ракеты и ракеты-носители: Пособие для студентов вузов. Москва, 2004, 512 с.
17. Паничкин Н.И., Слепушкин Ю.В. и др. Конструкция и проектирование космических летательных аппаратов. М., Машиностроение, 1986, 344 с.
18. Оболенский Е.П., Сахаров Б.И., Сибиряков В.А. Прочность летательных аппаратов и их агрегатов. М., Машиностроение, 1995, 504 с.
19. Алатырцев А.А., Алексеев А.И. и др. Инженерный справочник по космической технике.
21. Моссаковский В.И., Макаренков А.Г., и др. Прочность ракетных конструкций, Москва, Высшая школа, 1990, 359 с.
22. Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотных летательных аппаратов /под ред. А.А. Лебедева/ - М.: Машиностроение,
1980 г.
23. Остославский И.В., Стражева И.В. Динамика полета: траектории летательных аппаратов. – М. Машиностроение, 1969 г.
24. Колесников К.С. Динамика ракет. Учебник для вузов – М.: Машиностроение, 1980 г.
25. Кузовков Н.Т., Салычев О.С. Инерциальная навигация и оптимальная фильтрация.- М.: Машиностроение, 1982 г.
26. Лебедев А.А., Красильщиков М.Н., Малышев В.В. Оптимальное управление движением космических аппаратов М: Машиностроение, 1974 г.
27. Управление и наведение беспилотных маневренных летательных аппаратов на основе современных информационных технологий. / Под ред. М.Н. Красильщикова и Г.Г. Себрякова – М.: ФИЗМАТЛИТ, 2003 г.
28. Помыкаев И.И. Инерциальный метод измерения параметров движения летательных аппаратов – М.: Машиностроение, 1969 г.
29. Балк М.Б. Элементы динамики космического полета. М.: Наука, 1965 г.
30. Бромберг П.В. Теория инерциальных систем навигации – М.: Наука,
1979 г.
31. Васильев А.П., Кудрявцев В.М., Кузнецов В.А. и др. Основы теории и расчета жидкостных ракетных двигателей /Под ред. В.М. Кудрявцева М.: Высш. Школа, 1983г.
32. Добровольский М.В. Жидкостные ракетные двигатели. Основы проектирования / Под ред. Д.А. Ягодникова - М.: Изд-во МГТУ им. Н.Э. Баумана, 2006 г.








