 2015-09-06
2015-09-06 957
957Системы управления механизмами строительных машин предназначены для периодического включения и выключения с целью изменения, например, положения рабочего органа относительно базовой машины при выполнении технических операций.
Классификация систем управления строительных машин
По назначению системы управления можно разделить на следующие:
1. Система управления двигателем;
2. Система управления муфтами и тормозами;
3. Система рулевого управления;
4. Система управления установкой рабочего органа.
Причём все эти системы могут быть выполнены в двух вариантах:
1. Непосредственного управления;
2. С усилителем.
Классификация систем управления приведена в табл. 4.1 – 4.2.
Таблица 4.1
| Классификационный признак | Классификационная характеристика | |||
| Способ управления | Ручное управление | Автоматическое управление | ||
| Тип системы управления | Гидравли-ческая | Редукторная | Канатно-блочная | Комбини-рованная |
| Количество исполнительных механизмов | ОДИН | НЕСКОЛЬКО | ||
Гидравлическая система управления
Объёмные гидропередачи наиболее широко применяются в системах управления рабочими органами СМ, причём планами перспективного развития указанных машин предусматривается их дальнейшая гидрофикация.
Таблица 4.2
| Классификационный признак | Классификационная характеристика | ||
| Принцип действия | Насосная | Безнасосная | |
| Схема действия | Ручная | Автоматическая | Полуавтоматическая |
| Тип исполнительного механизма | Гидродвигатель возвратно-поступательного действия (гидроцилиндр) | Гидродвигатель вращательного действия (гидромотор) | |
| Способ регулирования | Дроссельное | Объёмное (машинное) | |
Наибольшее распространение в СМ получили насосные гидросистемы с ручным управлением для изменения положения рабочего органа (ковша скрепера, отвала бульдозера, автогрейдера) или его частей (заслонки, задней стенки ковша и т.д.), (рис. 4.1). Эти системы, как правило, имеют привод насоса от вала отбора мощности базовой машины, унифицированные с базовой машиной основные узлы гидропередачи (бак, насос, распределитель) и исполнительные механизмы в виде гидроцилиндров (скреперы, бульдозеры) и реже гидромоторов (поворот отвала автогрейдера на 360°) с дроссельным регулированием. Действие этих систем кратковременное, периодическое, а передаваемая мощность определяется необходимыми затратами на перестановку рабочего органа и составляет в зависимости от типа СМ и размеров рабочего органа -10 ÷ 50 % мощности двигателя.
Редукторная система управления
Редукторные системы управления рабочим органом распространены на автогрейдерах, грейдерах, грейдер - элеваторах и в сочетании с канатно-блочной системой на скреперах. Классификация таких систем представлена в табл. 4.3.
Таблица 4.3
| Классификационный признак | Классификационная характеристика | ||
| Тип привода | От основного двигателя | От индивидуального электромотора | От ручного штурвала |
| Тип редуктора | Червячный | Зубчатый | Комбинированный |
Редукторные системы управления могут иметь привод от основного двигателя машины (рис. 4.2, а) (автогрейдеры, грейдер - элеваторы), от индивидуальных электродвигателей (рис. 4.2, б) (скреперы, грейдер - элеваторы), от ручного штурвала (грейдеры).
Наибольшее распространение получили передачи с червячными редукторами в сочетании с другими видами передачи. Это объясняется их малыми габаритными размерами и свойством самоторможения, что позволяет обеспечивать рабочему органу определённое установочное положение без дополнительных фиксирующих устройств.
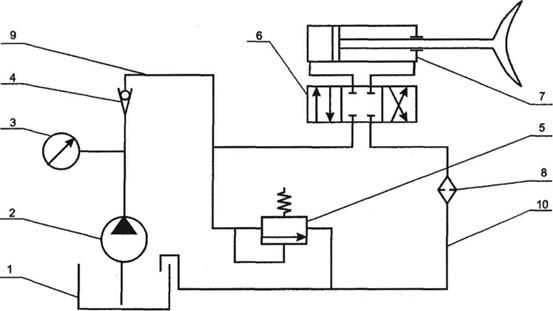
Рис. 4.1. Схема гидравлической системы управления:
1 - бак; 2 - насос; 3 - манометр; 4 - обратный клапан; 5 - клапан предохранительный; 6 - гидрораспределитель; 7 - гидроцилиндр; 8 - фильтр;
9 - напорная магистраль; 10 - сливная магистраль
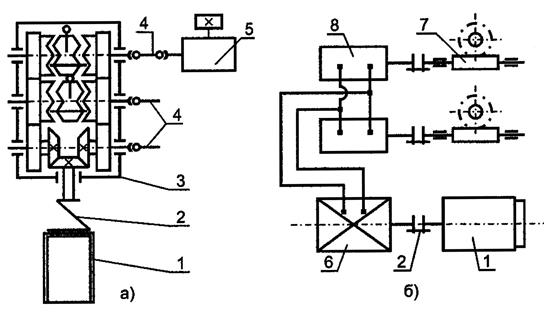
Рис. 4.2. Схема редукторных систем управления:
а) с приводом от вала отбора мощности; б) с приводом от отдельных двигателей; 1- двигатель (ДВС); 2- муфта; 3- раздаточная реверсивная
коробка; 4-карданная передача; 5- исполнительный редуктор;
6- генератор; 7- червячный редуктор; 8- электродвигатель
Канатно-блочная система управления
В настоящее время канатно-блочная система управления применяется довольно редко, преимущественно на скреперах, бульдозерах, экскаваторах и некоторых других машинах для земляных работ северного исполнения. Классификация канатно-блочных систем управления приведена в табл.4.4.
Таблица 4.4
| Классификационный признак | Классификационная характеристика | ||
| Тип редуцируюшего звена | Полиспаст | Дифференциальный барабан | Зубчатый редуктор |
| Расположение лебёдки | Переднее продольное | Заднее поперечное | |
| Число барабанов лебёдки | Одно-барабанная | Многобарабанная | |
| Система управления лебёдкой | Ручная | Пневматическая |
Канатно-блочная система управления состоит из лебёдки, регулирующего звена и канатов с блоками (рис. 4.3). Регулирующим звеном может быть полиспаст, дифференциальный барабан или зубчатый редуктор. Наибольшее распространение имеет система с полиспастом, она проста по конструкции и в эксплуатации.
Применяемые в канатно-блочных системах управления лебёдки имеют заднее поперечное расположение, что позволяет просто осуществить отбор мощности, а также уменьшить число перегибов канатов и направляющих блоков. Для облегчения работы машиниста в лебёдках применяется пневмоуправление фрикционами и тормозами.
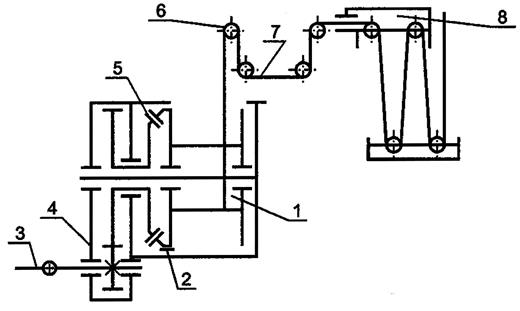
Рис. 4.3. Схема канатно-блочной системы управления:
1 - барабан; 2 - тормоз; 3 - вал отбора мощности; 4 - редуктор;
5 - фрикционная муфта; 6 - блок; 7 - канат; 8 - полиспаст








