 2015-10-13
2015-10-13 832
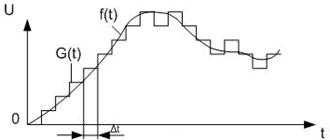
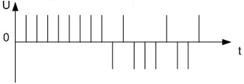
832При дельта-модуляції (ДМ) проводиться замінення початкового сигналу аналогової форми f (t)слідкуючим східчастим сигналом G (t) (рис 8.4, а). Ступінь відповідності функцій G (t) і f (t)визначається точністю апроксимації, тобто значеннями кроків дискретизації Δ t і квантування Δ U. При ДМ значення повідомлення в кожній точці опитування кодується однорозрядним двійковим кодом, для чого замінюють функції східчастого сигналу G (t) модульованим сигналом у вигляді одиничних імпульсів позитивної й негативної полярності (рис. 8.4, б).
При цьому полярність імпульсів виявляє знак різниці між поточною й попередньою вибірками. Спрощену структурну схему системи передачі з ДМ показано на рис. 8.4, в. Неперервний інформаційний сигнал f (t) подається на вхід віднімального пристрою (ВП), на другий вхід якого з виходу інтегратора (І)надходить квантований сигнал G (t), що відображає сигнал у попередній момент часу.
У ВП здійснюється порівняння цих сигналів і формується сигнал різниці f (t) ─ G (t),який подається на вхід імпульсного модулятора (ІМ). На другий вхід ІМз виходу генератора тактових імпульсів (ГТІ)подаються імпульси, частота проходження яких визначається вимогами до точності відновлення переданого сигналу на прийомі з урахуванням дії завад в каналі зв´язку.
Модульований сигнал на виході ІМє імпульсом, полярність якого визначається різницею між значеннями функцій f (t) і G (t). Heзмінювані ділянки інформаційного сигналу передаються імпульсами полярності, що чергується. З виходу ІМмодульована послідовність імпульсів надходить на інтегратор для формування сигналу G(t). З виходу інтегратора він подається на вхід ВПдля формування різницевого сигналу f (t) – G (t). З виходу ІМмодульовані сигнали подаються на передавач (Прд),з виходу якого вони надходять в канал. На виході передавача, наприклад, під час роботи за способом ДМ-АМ виникають імпульси тільки під час надходження на його вхід імпульсів позитивної полярності. У моменти надходження на вхід Прдімпульсів негативної полярності на його виході утворюються паузи. На приймальній стороні імпульси, що прийшли з каналу, надходять на приймач (Прм),який регенерує спотворені перешкодами імпульси.
На виході Прмотримують імпульси позитивної полярності, які подаються на відновлювач полярності імпульсів (ВПІ).На інший вхід відновлювача надходятьімпульси від ГТІ з частотою fi. Відновлювач заповнює паузи в послідовності позитивних імпульсів негативними імпульсами. З виходу ВПІотримана послідовність імпульсів подається на інтегратор, що формує ступінчастий сигнал G(t). Для отримання згладженого сигналу φ (t), подібного за формою до початкового f (t), сигнал G (t) пропускають через фільтр нижніх частот (ФНЧ).
 а
а
|  б
б
|
в
Рис. 8.4. Дельта-модуляція: а – замінення початкового аналогового
сигналу f (t)східчастим сигналом G(t); б – кодування ДМ-сигналу
однорозрядним двійковим кодом; вструктурна схема системи передачі
Ступінь відмінності сигналу φ (t), отриманого на виході системи передачі, від початкового інформаційного сигналу f (t) залежатиме від рівня завад і спотворень в каналі, а також шуму квантування на передачі.
До недоліків ДМ можна віднести низьку завадостійкість системи передачі під час дії в каналі імпульсних завад і сильну залежність динамічного діапазону від частоти модулювального сигналу. Для підвищення завадостійкості передачі сигналів з ДМ розширюють використовувану смугу частот каналу або застосовують методи боротьби із завадами й спотвореннями передаваних імпульсів.








