 2017-12-16
2017-12-16 1092
1092На рисунке 2.1.а приведена схема включения ДПТ независимого возбуждения.
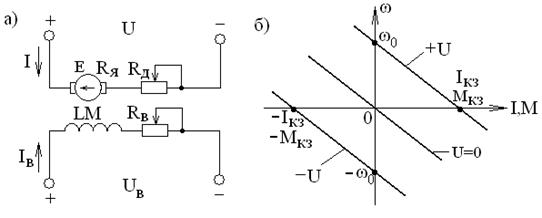
Рисунок 2.1 – Схема включения(а) и статические характеристики(б) ДПТ НВ
На схеме приняты следующие обозначения: U – напряжение на якоре, В; UВ – напряжение на обмотке возбуждения, В; I – ток якоря, А; IВ– ток возбуждения, А; RД – добавочное сопротивление в цепи якоря, Ом; RВ – добавочное сопротивление в цепи обмотки возбуждения, Ом; Rя – сопротивление якоря, Ом.
Rя = 1,25(rоя + rдп) + rко + rщ.
rоя – сопротивление обмотки якоря.
rдп – сопротивление добавочных полюсов.
rко – сопротивление компенсационной обмотки.
rщ – сопротивление щёточного контакта.
Коэффициент 1,25 перед скобкой в данной формуле учитывает увеличение сопротивления обмоток ДПТ при нагревании.
В установившемся режиме работы по второму закону Кирхгофа для якорной цепи двигателя можно записать следующее выражение:
U=IR + E, (1)
где E=kФω — ЭДС вращения (противоЭДС), (2)
k – конструктивный коэффициент двигателя,
Ф – основной магнитный поток,
|
|
|
ω – угловая скорость вращения якоря.
Направление токов и ЭДС, указанное на схеме, соответствует двигательному режиму работы.
R=  — общее сопротивление якорной цепи.
— общее сопротивление якорной цепи.
Подставляя (2) в (1), получаем: U=IR + kФω, откуда
 (3)
(3)
Такая зависимость ω = f(I) называется электромеханической или скоростной характеристикой ДПТ НВ.
Ток и момент двигателя связаны следующей зависимостью M = kФI, откуда получаем
 (4)
(4)
Для получения формулы механической характеристики ДПТ НВ подставим (4) в (3):
 (5)
(5)
Электромеханические и механические характеристики ДПТ НВ представляют собой линейные зависимости угловой скорости от тока и момента, вид которых для разных полярностей питающего напряжения якоря приведён на рисунке 2.1.б. Эти характеристики совмещены, что справедливо в случае kФ = const.








