 2014-01-31
2014-01-31 1137
1137Классификация механизмов по Ассуру
Образование рычажных механизмов.
Основной принцип образования рычажных механизмов был впервые сформулирован в 1914 году русским учённым Ассуром Л. В. (1878-1920). Им был предложен и развит метод образования механизмов путём последовательного наслоения кинематических цепей обладающих определёнными структурными свойствами. Заключается метод в следующем.
Группами Ассура называются кинематические цепи с нулевой степенью подвижности относительно тех звеньев, с которыми входят в кинематические пары свободные элементы её звеньев, и не распадающиеся на более простые цепи, обладающие также нулевой степенью подвижности.
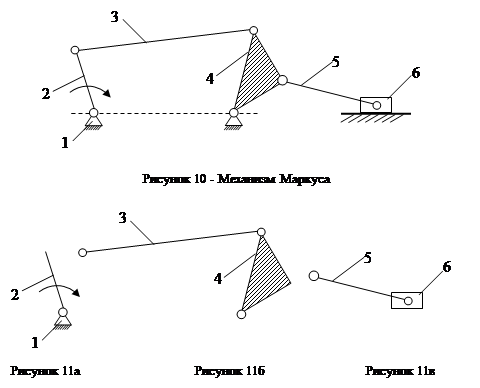
Рассмотрим порядок образования механизмов по Ассуру на конкретном примере. На рисунке 10 приведена кинематическая схема механизма Маркуса. Определим степень подвижности механизма:n=6, P5=7, Р4=0,
W=3(n-1)-2P5-Р4=3(6-1)-2×7=1.
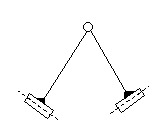
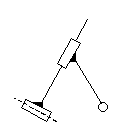
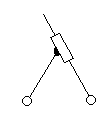
Если отбросить все звенья и оставить только ведущее звено 2 и стойку 1, то W оставшегося механизма тоже будет равна 1 (рисунок 11а). Теперь если последовательно подсоединить к основному механизму звенья 3, 4 (рисунок 11б) и соединить со стойкой, то образованный механизм будет иметь W=1. То же получим при подсоединении звеньев 5, 6 (рисунок 11в). Следовательно, подсоединяемые группы звеньев 3, 4 и 5, 6 имеют нулевую степень подвижности, по отношению к тем звеньям, к которым они подсоединяются.
|
|
|
Определим степень подвижности кинематической цепи состоящей из звеньев 3, 4: n=2; P5=3; Р4=0, W=3n-2P5-Р4=3×2-2×3=0. Определим степень подвижности кинематической цепи состоящей из звеньев 3, 4, 5, 6. n=4; P5=6; Р4=0, W=3n-2P5-Р4=3×4-2×6=0.
Таким образом подсоединяемые группы звеньев имеют нулевую степень подвижности.
Выпишем структуру групп Ассура. Обозначим:
 hГ - число степеней свободы кинематической цепи группы Ассура;
hГ - число степеней свободы кинематической цепи группы Ассура;
nГ - число звеньев кинематической цепи группы Ассура;
P5Г - число кинематических пар пятого класса, которые образуют звенья кинематической цепи группы Ассура;
Р4Г =0 - количество кинематических пар с двумя степенями подвижности в группах Ассура равно нулю, т. к. плоские кинематические пары высшего класса можно всегда заменить кинематическими парами низшего класса с одной степенью подвижности.
Тогда степень подвижности кинематической цепи группы Ассура можно определить по формуле
hГ=3nГ-2P5Г-Р4Г,
учитывая, что hГ=0 и Р4Г=0, получим
0=3nГ-2P5Г откуда P5Г=(3/2) × nГ. (4)
Как следует из структурной формулы групп Ассура (4) число звеньев nГ в группе Ассура должно быть парным, поскольку число кинематических пар P5Г должно быть целым числом:
nГ 2 4 6 8...
Р5Г 3 6 9 12...
Рассмотрим группы Ассура. Механизм, состоящий из поводка со станиной, получим название исходного механизма или начального (рисунок 11а). Как правило в механизме это ведущее звено. Группа звеньев, состоящая из двух звеньев и трёх кинематических пар получила название двухповодковой группы Ассура. В зависимости от числа внутренних кинематических пар в группе Ассура определяется класс группы, а в зависимости от числа элементов, которыми группа подсоединяется к станине и механизму, определяется порядок группы.
|
|
|
Класс и порядок механизма определяется классом и порядком старшей подсоединённой группы.
Таким образом двухповодковая группа Ассура является группой первого класса второго порядка.
В любой группе Ассура один из стержней может быть заменён ползуном, и тогда получим модифицированную группу Ассура. Двухповодковые группы Ассура могут иметь несколько модификаций в зависимости от вида соединения внешних и внутренних кинематических пар – вращательных и поступательных. Возможные виды двухповодковых групп Ассура сведены в таблицу 2.
Таблица 2.2. Виды двухповодковой группы
    Вид группы Вид группы
| первый | второй | третий | четвёртый | пятый |
 Эскиз группы Эскиз группы
| |||||
| Символ группы | ВВВ | ВВП | ВПВ | ПВП | ППВ |
 Рассмотрим следующую группу Ассура, которая должна содержать четыре звена и шесть кинематических пар. Для этого сочетания могут быть получены три типа кинематических цепей.
Рассмотрим следующую группу Ассура, которая должна содержать четыре звена и шесть кинематических пар. Для этого сочетания могут быть получены три типа кинематических цепей.
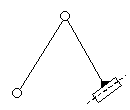
На рисунке 12 представлена сложная незамкнутая кинематическая цепь, которая является группой третьего класса третьего порядка. Эта кинематическая цепь получила название трёхповодковой группы. Звено EFG здесь называется базисным.
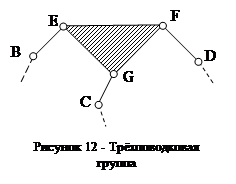
 Вторая возможная кинематическая цепь, отвечающая условию nг=4, P5г=6 представлена на рисунке 13. Это замкнутая кинематическая цепь, содержащая два базисных звена ABF и CDE и четырёхсторонний замкнутый контур ABCD. Группы, в состав которых входят четырёхсторонние замкнутые контуры, относятся к группам четвёртого класса. Представленная группа является группой четвёртого класса второго порядка, т. к. подсоединение к основному механизму первого класса производится двумя элементами E и F. Соответственно механизм, в который входят группы не выше 4 го класса 2 го порядка называется механизмом 4 го класса.
Вторая возможная кинематическая цепь, отвечающая условию nг=4, P5г=6 представлена на рисунке 13. Это замкнутая кинематическая цепь, содержащая два базисных звена ABF и CDE и четырёхсторонний замкнутый контур ABCD. Группы, в состав которых входят четырёхсторонние замкнутые контуры, относятся к группам четвёртого класса. Представленная группа является группой четвёртого класса второго порядка, т. к. подсоединение к основному механизму первого класса производится двумя элементами E и F. Соответственно механизм, в который входят группы не выше 4 го класса 2 го порядка называется механизмом 4 го класса.
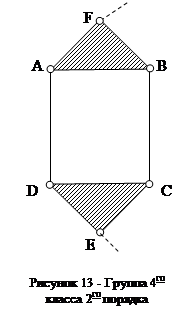
Третий возможный вариант при nг=4, P5г=6 показан на рисунке 14. Эта цепь распадается на две простейшие группы BCD и EFG второго порядка (двухповодковые).
При определении класса механизма необходимо знать, какое звено является ведущим (входным). Часто в зависимости от выбора ведущего звена зависит класс и порядок механизма.
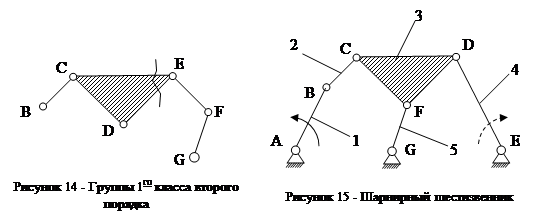
Так, например, механизм, показанный на рисунке 15 при ведущем звене 1 можно рассматривать, как состоящий из начального механизма (звено 1 и стойка 6) и трёхповодковой группы Ассура (звенья 2, 3, 4,5).
При ведущем звене 4 механизм можно рассматривать, как состоящий из начального механизма (звено 4 и стойка 6) и двух двухповодковых групп (звенья 3, 5 и кинематические пары D, F, G; звенья 1 и 2 и кинематические пары А, В, С). В первом случае - механизм 3 го класса третьего порядка, во втором – механизм 1 го класса второго порядка.
 |








