 2020-04-07
2020-04-07 489
489Уравнения движения осесимметричного ЛА в боковой плоскости без крена аналогичны уравнениям движения в вертикальной плоскости (смотрите (2.2) и (2.3)), поэтому контур управления нормальной перегрузкой в боковой плоскости идентичен контуру управления нормальной перегрузкой в вертикальной плоскости. Уравнения движения рыскания (2.7) аналогичны уравнениям для первого этапа продольного возмущенного движения (2.4), поэтому идентичны и передаточные функции маневренного ЛА в продольной (2.8) и боковой плоскости (2.10).
Очевидно, что контур управления нормальной перегрузкой в боковой плоскости с дифференцирующим гироскопом и датчиком линейных ускорений имеет такие же свойства, как и контур стабилизации в вертикальной плоскости, приведенный на рис. 2.1.
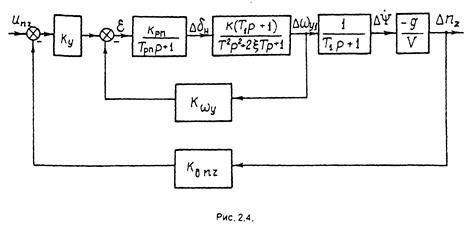
На рис. 2.4 приведена структурная схема контура стабилизации перегрузки в боковой плоскости, динамика которого определяется следующей линейной системой дифференциальных уравнений:
 (2.13)
(2.13)
Уравнения, учитывающие динамику контура стабилизации перегрузки в боковой плоскости с учетом инерционности рулевого привода в виде апериодического звена первого порядка с коэффициентом kРП и постоянной времени ТРП, имеют вид, аналогичный (2.12):
 (2.14)
(2.14)
Математические модели рулевых приводов различных типов рассмотрены в работах [13], [16].
Радиолокационные визиры








