 2020-10-10
2020-10-10 973
973ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«ДОНСКОЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
(ДГТУ)
Кафедра "Робототехника и мехатроника"
Широтно-импульсный преобразователь
электропривода в схеме «ШИП-ДПТ»
к выполнению лабораторной работы по дисциплине
«Электрические и гидравлические приводы мехатронных и робототехнических систем»
Разработали: Н.Ф. Карнаухов
М.Н. Филимонов
Ростов - на -Дону.
2018
В современных электроприводах МС и РТС находят применение нереверсивные и реверсивные широтно-импульсные преобразователи (ШИП), транзисторные исполнения схем которых представлены на рис. 1.
а) б)
Рисунок 1 - Схемотехнические решения ШИП
Транзисторный реверсивный ШИП может быть выполнен на двух и четырех транзисторах по мостовой схеме с одним источником и двумя источниками питания. Рассмотрим работу реверсивного ШИП (рис. 2,а). В этой схеме можно реализовать несколько способов управления транзисторами VT1-VT4.
а) б)
в)
Рисунок 2. Схема ШИП - (а), эпюры напряжений и токов - (б, в)
При симметричном управлении транзисторы в схеме отпираются попарно VT1 и VT4 или VT3 и VT2. Когда отперты транзисторы VT1 и VT4 (интервал 0 ≤ t ≤ tи ) от источника питания Uс потребляется энергия (рисунок 2,б). При запирании транзисторов VT1, VT4 и отпирании VT3,VT2 (момент t = tи ) напряжение на активно-индуктивной нагрузке реверсируется, а ток нагрузки за счет ЭДС самоиндукции Е сохраняет свое прежнее направление, замыкаясь через диоды VD3,VD2 и конденсатор фильтра источника питания.
Среднее значение напряжения на нагрузке
 , (1)
, (1)
Если ШИП работает на противо – ЭДС, то есть на якорь ДПТ, то напряжение на якоре двигателя определяют по выражению
 (2)
(2)
Простота реализации и отсутствие зоны нечувствительности в регулировочной характеристике являются преимуществами такого ШИП.
Недостатком ШИП с симметричным управлением является знакопеременное напряжение, повышенный коэффициент пульсаций на нагрузке (якоре ДПТ). Поэтому реверсивный ШИП с симметричным управлением применяется только в маломощных электроприводах электромеханических (мехатронных) систем.
При несимметричном управлении переключаются транзисторные ключи фазной группы VT1 и VT2 (или VT4 и VT3 при реверсе выходного напряжения) управляются в противофазе, а транзисторы другой фазы: VT2 постоянно отперт, другой VT1 – заперт. На нагрузке формируется напряжение, имеющее форму знакопостоянных импульсов. Если нагрузка ШИП активно – индуктивная, то на интервале 0 ≤ t ≤ tи ток потребляется от источника питания и протекает через транзисторы VT1 и VT4. Когда транзистор VT1 запирается (момент времени tи ), то ток нагрузки iи протекает через отпертый транзистор VT4 и обратный диод VD2 (интервал tи ≤ t ≤ Tk).
Если нагрузкой является ДПТ, то при Uн > Е (противо-ЭДС двигателя) энергия потребляется от источника питания. Ток нагрузки на интервале 0 ≤ t ≤ tи протекает через транзисторы VT1 и VT4, а на интервале tи ≤ t ≤ Tk - через транзистор VT4 и обратный диод VD2. Если  = const, а скорость ДПТ изменяется, то для случая, когда Е >
= const, а скорость ДПТ изменяется, то для случая, когда Е >  , направление тока нагрузки изменится. Когда открыт транзистор VT4, электромагнитная энергия якоря накапливается под воздействием противо-ЭДС, и при запирании транзистора VT4 отдается в источник питания через диоды VD1 и VD4 (рисунок 2, в).
, направление тока нагрузки изменится. Когда открыт транзистор VT4, электромагнитная энергия якоря накапливается под воздействием противо-ЭДС, и при запирании транзистора VT4 отдается в источник питания через диоды VD1 и VD4 (рисунок 2, в).
Режим переменных токов в нагрузке возможен при Е  на интервале 0 ≤ t ≤ t1, когда ток протекает через обратные диоды VD4 и VD1; на интервале t1 ≤ t ≤ tи – через транзисторы VT1 и VT4; на интервале t2 ≤ t ≤ t2 – через транзистор VT2 и обратный диод VD4; на интервале t2 ≤ t ≤ Tk – через транзистор VT4 и обратный диод VD2 (рисунок 2, в). Анализ временных диаграмм показывает, что при нагрузке с противо-ЭДС в режиме потребления наиболее загруженными являются транзисторы, а в режиме возврата «электромагнитной энергии из силового контура» в емкостной фильтр источника питания Uс (т.е. рекуперации) – диоды VD1-VD4. Коэффициент пульсации выходного напряжения при несимметричном управлении в два раза меньше, чем при симметричном управлении и равен:
на интервале 0 ≤ t ≤ t1, когда ток протекает через обратные диоды VD4 и VD1; на интервале t1 ≤ t ≤ tи – через транзисторы VT1 и VT4; на интервале t2 ≤ t ≤ t2 – через транзистор VT2 и обратный диод VD4; на интервале t2 ≤ t ≤ Tk – через транзистор VT4 и обратный диод VD2 (рисунок 2, в). Анализ временных диаграмм показывает, что при нагрузке с противо-ЭДС в режиме потребления наиболее загруженными являются транзисторы, а в режиме возврата «электромагнитной энергии из силового контура» в емкостной фильтр источника питания Uс (т.е. рекуперации) – диоды VD1-VD4. Коэффициент пульсации выходного напряжения при несимметричном управлении в два раза меньше, чем при симметричном управлении и равен:
 (3)
(3)
При поочередном управлении в состоянии переключения находятся все четыре транзистора моста, однако частота переключения каждого из них в два раза меньше частоты импульсного напряжения на выходе. При одной полярности выходного напряжения на нагрузке поочередно отпираются транзисторы VT1 и VT4 (транзисторы VT3 и VT2 при этом заперты). При обратной полярности выходного напряжения включаются транзисторы VT3 и VT2, а транзисторы VT1 и VT4 закрыты. При этом выходное напряжение имеет форму знакопостоянных импульсов (рисунок 2,в). При запирании транзистора VT1 (время tи ) ток нагрузки под действием ЭДС самоиндукции замыкается через транзистор VT4 и обратный диод VD2. На интервале tи … Tк выходное напряжение равно нулю, так как нагрузка шунтируется транзистором VT2 и диодом VD4. Следует отметить, что при указанных способах управления транзисторами ШИП (симметричном и несимметричном) наблюдается двухсторонний обмен энергией между источником питания и нагрузкой, а при поочередном управлении такой обмен энергией отсутствует.
Управление ШИП осуществляется широтно-импульсным модулятором (ШИМ), где происходит преобразование непрерывного исходного сигнала в последовательность прямоугольных импульсов неизменной амплитуды и частоты, но переменной длительности, пропорциональной управляющему (входному) сигналу. ШИМ содержит задающий генератор опорного пилообразного напряжения, имеющий частоту fо = 1/ Tк. Опорное напряжение Uоп сравнивается (рисунок 3) с управляющим (входным) напряжением Uу. В момент равенства указанных напряжений устройством сравнения (компаратором на операционном усилителе ОУ) формируется управляющий импульс, переключающий транзисторные ключи. Такие устройства, реализующие ШИМ, называют модуляторами длительности импульсов (МДИ).
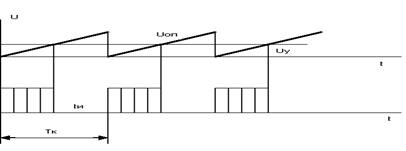
Рисунок 3
Описание лабораторной установки
Лабораторная установка выполнена в виде переносного стенда, на передней панели которого приведена принципиальная схема (рисунок 4), «контрольные точки» в принципиальной схеме. Схема на передней панели стенда «условно поделена» на шесть функционально законченных блоков:
· блок Б1 – задающий генератор прямоугольных импульсов (контрольная точка (к.т.) КТ1), реализован на трех логических элементах И-НЕ микросхемы Д1 (серии К511.ЛА2). Частота fк регулируется изменением резистора R1;
· блок Б2 – интегратор, предназначен для преобразования прямоугольного сигнала в пилообразный (к.т. КТ2), реализован на операционном усилителе ДА1 (серии К 153 УД1);
· блок Б3 – модулятор длительности импульсов (МДИ), устройство, имеющее два входа. На один (неинвертирующий) вход подается периодический пилообразный сигнал, на другой – управляющий. Блок выполнен на аналоговой микросхеме ДА2 (серии К 153 УД1);
· контрольная точка КТ 4. Регулирование скорости, реверс двигателя осуществляется потенциометром R9;
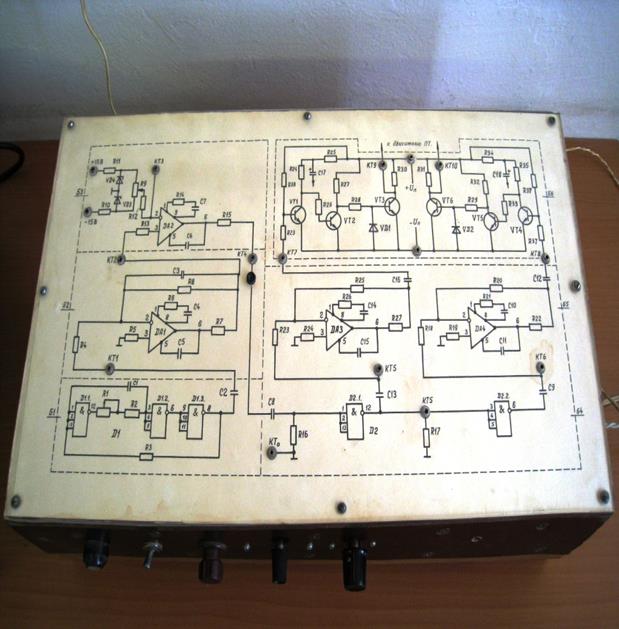
Рисунок 4 - Лабораторный стенд для исследования широтно-импульсного преобразователя по схеме «ШИП-ДПТ»
· блок Б4 – инвертор, формирует два инвертированных сигнала, необходимых для управления предварительными усилителями мощности и реверса двигателя. Блок выполнен на логическом элементе И-НЕ микросхемы Д2 серии К 511 ЛА2. Контрольные точки КТ5, КТ6;
· блок Б5 – содержит согласующие каскады, выполненные на операционных усилителях ДА3, ДА4 (К 153УД1), работающие в ключевом режиме;
· блок Б6 – выходные импульсные усилители мощности, усиливающие сигналы с блока Б5 в мощный сигнал, снимаемый с ключевых транзисторов VT3 и VT6 для управления ДПТ (М).
В общем случае структуру импульсного усилителя мощности
(ИУМ) можно представить, как приведено на рисунке 5.
Рисунок 5 - Структура импульсного усилителя мощности
ИУМ состоит из двух трехкаскадных устройств, каждый собран по схеме предварительного усилителя (ПУ), выполненного на транзисторе VT1, VT4 (см. рисунок 4), «предоконечного» усилителя мощности (ПУМ) на транзисторе VT2 (VT5), служащего для согласования мощного усилительного каскада (УМ), выполненного на транзисторе VT3 (VT6). Все транзисторы усилительных каскадов работают в ключевом режиме.
При работе импульсного усилителя мощности. на входы предварительных усилителей (ПУ) (точки КТ7 и КТ8) поступают прямоугольные импульсы положительной полярности с коэффициентом заполнения  = 0,5. Это ведет к открыванию всех транзисторов (VT1, VT2, VT3 и VT4, VT5, VT6). На вход двигателя М (точки КТ9, КТ10) приходит усиленный сигнал с γ = 0,5. При равенстве средних значений напряжений в контрольных точках КТ9 и КТ10 якорь двигателя уравновешивается,
= 0,5. Это ведет к открыванию всех транзисторов (VT1, VT2, VT3 и VT4, VT5, VT6). На вход двигателя М (точки КТ9, КТ10) приходит усиленный сигнал с γ = 0,5. При равенстве средних значений напряжений в контрольных точках КТ9 и КТ10 якорь двигателя уравновешивается,  = 0. Если в процессе регулирования напряжения управления на вход транзистора VT1 (точка КТ7) поступает положительный импульс с коэффициентом заполнения 0,1, то на вход транзистора VT4 (точка КТ8) поступает сигнал с
= 0. Если в процессе регулирования напряжения управления на вход транзистора VT1 (точка КТ7) поступает положительный импульс с коэффициентом заполнения 0,1, то на вход транзистора VT4 (точка КТ8) поступает сигнал с
γ = 0,9. Импульсы, усиленные ИУМ, подаются на обмотку якоря двигателя. В обмотке якоря двигателя импульсы формируют суммарное (интегральное) значение напряжения, под воздействием которого якорь двигателя приводится во вращение. Направление вращения определяется и зависит от скважности импульсов, формируемых МДИ. Измерение скорости вращения якоря двигателя осуществляется тахометрическим способом или посредством фотоэлектрического (бесконтактного) датчика или частотомера.
Подготовка к выполнению лабораторной работы
1. Ознакомиться с описанием лабораторной установки.
2. Изучить расположение «рукояток» потенциометрических регулятров на боковой панели стенда, ознакомиться с принципами работы блоков и особенностями подключения измерительной аппаратуры.
3. Подключить питание стенда, осциллографа, частотомера к сети переменного напряжения (розеткам ~ 220 В, 50 Гц).
4. Включить тумблеры «Сеть» осциллографа, электронно-счетного частотомера и прогреть приборы в течение 10 - 15 минут.
5. Включить тумблер “ Сеть “ стенда.
Выполнение экспериментальной части на стенде
1. Установить ручку регулятора (потенциометр R9) частоты вращения якоря двигателя в нулевое положение.
2. Включить источники питания лабораторного стенда.
3. «Земляной» конец соединительного кабеля осциллографа подсоединить к «корпусной» контрольной точке схемы стенда (КТ0). Поочередно подключая кабель осциллографа к контрольным точкам КТ1 →…КТ10, снять эпюры напряжений с учетом масштабного делителя осциллографа. Эпюры напряжений построить относительно «общей оси координат» и дать к ним пояснения в отчете.
4. Подключить осциллограф к контрольной точке КТ1 и замерить частоту следования импульсов. Результаты записать при крайнем левом и правом положениях движка потенциометра R1. Контроль измерений выполнить с помощью частотомера.
5. Изменяя положение движка потенциометра R9 определить диапазон регулирования скорости вращения вала при реверсе двигателя:
 .
.
Для этого, при нахождении ручки “об/мин” в нулевом положении (движок потенциометра R9) добиться нулевого показания частотомера при остановленном диске двигателя. Затем, плавно изменяя положение движка R9, установить минимальные равномерные обороты выходного вала двигателя, измерить частотомером частоту вращения якоря ДПТ, результаты занести в отчет (nmin =…). Затем устанавливают максимальную частоту вращения вала двигателя по частотомеру и результат измерений заносят также в отчет (nmax =…). Определяют диапазон регулирования скорости Д.
6. Сравнить диапазоны регулирования скорости двигателя при вращении якоря по часовой и против часовой стрелки.
7. Определить линейность широтно-импульсного регулятора, т.е. зависимость n = f ( ) правого и (
) правого и ( ) левого направления вращения якоря двигателя. Для выполнения задания по п. 7 необходимо подсоединить кабель осциллографа к контрольной точке КТ9. Установить минимальную устойчивую частоту вращения двигателя. Произвести измерение длительности импульсов t1 (по осциллографу) и число оборотов “n” (по частотомеру, тахогенератору). Результаты измерений занести в таблицу 1.
) левого направления вращения якоря двигателя. Для выполнения задания по п. 7 необходимо подсоединить кабель осциллографа к контрольной точке КТ9. Установить минимальную устойчивую частоту вращения двигателя. Произвести измерение длительности импульсов t1 (по осциллографу) и число оборотов “n” (по частотомеру, тахогенератору). Результаты измерений занести в таблицу 1.
Таблица 1.
| Параметр | № измерения | ||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
| n, об/мин | |||||||
| (с) | |||||||
| (с) | |||||||
Изменяя скорость вращения якоря двигателя на 10-15% от nmin в сторону увеличения, произвести 6-7 измерений от nmin до nmax и данные занести в таблицу 1. Аналогичные измерения произвести для контрольной точки КТ10 при реверсировании двигателя. Данные результата эксперимента также занести в таблицу 1.
8. Построить зависимости  по данным таблицы 1. Дать анализ полученных графических зависимостей, записать выводы.
по данным таблицы 1. Дать анализ полученных графических зависимостей, записать выводы.
9. Снять механические характеристики системы ШИП-ДПТ при изменяющейся скважности импульсов  = 0,1 – 0,9. При этом значение γ следует контролировать осциллографом, в момент «нагружения» двигателя (током якоря Iя) посредством устройства торможения. . Результаты эксперимента также занести в таблицу 2.
= 0,1 – 0,9. При этом значение γ следует контролировать осциллографом, в момент «нагружения» двигателя (током якоря Iя) посредством устройства торможения. . Результаты эксперимента также занести в таблицу 2.
Таблица 2.
| Скважность импульсов | Угловая скорость / ток якоря | ||||
| 1 | 2 | 3 | 4 | 5 | |
| 0 |  |  |  |  |  |
| 0,1 | |||||
| 0,3 | |||||
| 0,5 | |||||
| 0,7 | |||||
| 0,9 | |||||
| 1 | |||||
10. По данным таблицы 2 построить графические зависимости
 при изменении параметра = 0,1 – 1,0.
при изменении параметра = 0,1 – 1,0.
Перечень контрольных вопросов по лабораторной работе
1. Как изменится форма выходного напряжения интегратора при увеличении емкости C3 конденсатора в 3 раза?
2..Что изменится при работе ШИП-преобразователя, если резистор R1 уменьшить в 2 раза?
3. Как изменится форма нарастания пилообразного напряжения на выходе интегратора, если конденсатор С3 имеет повышенный ток утечки?
4. На какой параметр работы схемы повлияет увеличение резистора R16 в 3 раза?
5. Поясните физические основы формирования «разнополярного» напряжения на якоре ДПТ при питании его в схеме от однополярного источника?








