 2014-02-02
2014-02-02 1213
1213Рассмотрим преобразование электрической мощности, подводимой к статору двигателя с помощью энергетической диаграммы, что позволит получить выражение для вращающего момента АД.
Подводимая к статору АД мощность определяется по формуле
 , (3.14)
, (3.14)
где  - фазные напряжение и ток;
- фазные напряжение и ток;  - мощность потерь в меди обмоток статора;
- мощность потерь в меди обмоток статора;  - мощность потерь в стали статора;
- мощность потерь в стали статора; 
Рис.3.7
- электромагнитная мощность, передаваемая электромагнитным путем от статора через зазор ротору двигателя; - полная механическая мощность;
- полная механическая мощность;  - мощность потерь в меди обмоток ротора;
- мощность потерь в меди обмоток ротора; - полезная механическая мощность на валу двигателя;
- полезная механическая мощность на валу двигателя;  - мощность механических потерь, состоящая из мощности потерь на трение в подшипниках и мощности вентиляционных потерь;
- мощность механических потерь, состоящая из мощности потерь на трение в подшипниках и мощности вентиляционных потерь; - мощность добавочных потерь, включающая мощности пульсационных и поверхностных потерь, возникающих в зубцах статора при вращении ротора вследствие пульсации проходящего через зубец потока.
- мощность добавочных потерь, включающая мощности пульсационных и поверхностных потерь, возникающих в зубцах статора при вращении ротора вследствие пульсации проходящего через зубец потока.
Моменту холостого хода  соответствует мощность
соответствует мощность
 ,
,
где  - угловая скорость ротора АД.
- угловая скорость ротора АД.
Из диаграммы следует, что полная механическая мощность
 .
.
Вращающий момент двигателя создается в результате взаимодействия ВМП статора и тока в роторе. ВМП вращается с частотой  . Поэтому развиваемая им электромагнитная мощность
. Поэтому развиваемая им электромагнитная мощность  . Так как
. Так как  , то
, то  . (3.15)
. (3.15)
Тогда из выражения (3.15) вращающий момент
 (3.16)
(3.16)
Подставляя значение  из выражения (3.13) в (3.16), получим
из выражения (3.13) в (3.16), получим
 (3.17)
(3.17)
где  - результирующее реактивное сопротивление рассеяния фазы АД.
- результирующее реактивное сопротивление рассеяния фазы АД.
В соответствии с формулой (3.17) зависимость вращающего момента АД от
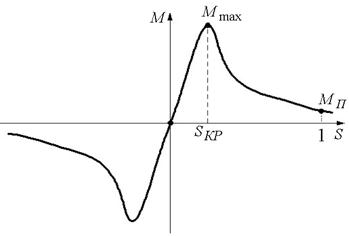 скольжения S представлена на рис. 3.8, где
скольжения S представлена на рис. 3.8, где  – пусковой момент;
– пусковой момент;  – максимальный момент;
– максимальный момент;  – критическое скольжение, соответствующее . При S=0 ротор “догоняет” ВМП статора и М=0. Ротор начинает затормаживаться и его скольжение возрастает до номинального.Если из выражения (3.17) найти производную
– критическое скольжение, соответствующее . При S=0 ротор “догоняет” ВМП статора и М=0. Ротор начинает затормаживаться и его скольжение возрастает до номинального.Если из выражения (3.17) найти производную
Рис.3.8
 и положить ее равной нулю, то можно определить максимальный момент АД и
и положить ее равной нулю, то можно определить максимальный момент АД и
 , (3.18)
, (3.18)
 . (3.19)
. (3.19)
Выражение (3.18) удобно представить в виде
 . (3.20)
. (3.20)








