2014-02-02
2014-02-02 1294
1294Рис. 4.70
Синтез последовательного корректирующего устройства осуществляется по следующему алгоритму;
1. Строится ЛАЧХ приведенной линейной части системы  по передаточной функции:
по передаточной функции:
 , (4.64)
, (4.64)
где  - коэффициент усиления, выделенный из линейной функции
- коэффициент усиления, выделенный из линейной функции
 (4.65)
(4.65)
или
 , (4.66)
, (4.66)
где 
- нормированный коэффициент гармонической линеаризации.
2. В соответствии с заданными показателями качества ( и σ%) строится желаемая ЛАЧХ
и σ%) строится желаемая ЛАЧХ  так, как это делается для линейных систем.
так, как это делается для линейных систем.
3. Определяется ЛАЧХ последовательного корректирующего устройства:
 (4.67)
(4.67)
4. По ЛАЧХ корректирующего устройства определяют передаточную функцию корректирующего устройства  .
.
5. Строится ЛФЧХ φ(ω) скорректированной линейной части системы.
6. Строится запретная область, соответствующая допустимому показателю колебательности  . ЛФЧХ скорректированной линейной части системы не должна заходить в запретную область. Если ЛФЧХ скорректированной линейной части системы заходит в эту область, то необходимо изменить параметры корректирующего устройства так, чтобы ЛФЧХ φ(ω) не заходила в эту зону, но при этомЛАЧХ скорректированной части удовлетворяла заданным показателям качества.
. ЛФЧХ скорректированной линейной части системы не должна заходить в запретную область. Если ЛФЧХ скорректированной линейной части системы заходит в эту область, то необходимо изменить параметры корректирующего устройства так, чтобы ЛФЧХ φ(ω) не заходила в эту зону, но при этомЛАЧХ скорректированной части удовлетворяла заданным показателям качества.
7. Проводится моделирование системы.
Приведенная процедура синтеза отличается от процедуры синтеза линейных систем только пунктом построения запретной области.
Передаточная функция разомкнутой системы гармонически линеаризованной системы с однозначной нелинейной характеристикой имеет вид:
 (4.68)
(4.68)
Передаточная функция замкнутой системы определяется как:
 (4.69)
(4.69)
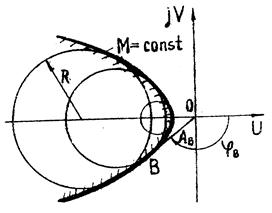
Показатель колебательности для нелинейной системы определяется по формуле:
 , (4.70)
, (4.70)
где  и
и  - действительная и мнимая части АФХ приведенной линейной части системы (
- действительная и мнимая части АФХ приведенной линейной части системы ( ).
).
Преобразуя, получаем выражение:
 (4.71)
(4.71)
Данное уравнение при  является уравнением окружности. Пусть величина принимает значения в интервале:
является уравнением окружности. Пусть величина принимает значения в интервале:
 (4.72)
(4.72)
Тогда по выражению можно построить семейство окружностей при  при различных значениях из интервала. Линией одинакового значения является огибающая этого множества окружностей.
при различных значениях из интервала. Линией одинакового значения является огибающая этого множества окружностей.