 2014-02-24
2014-02-24 2024
2024Самара
Учебное пособие
ПРЕОБРАЗОВАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА
СВОЙСТВА ЭЛЕКТРОМЕХАНИЧЕСКИХ
КОНСТРУКЦИИ И ПОТРЕБИТЕЛЬСКИЕ
П.В. ТУЛУПОВ
Э.Г. ЧЕБОТКОВ
Отпечатано в типографии
Специальные электромеханические преобразователи
ОГЛАВЛЕНИЕ
Введение. 3
1. Специальные трансформаторы.. 4
1.1. Общие сведения. 4
1.2. Автотрансформатор. 4
1.3. Трансформаторы для преобразования числа фаз. 9
1.3.1. Преобразователь трехфазной системы питания в двухфазную.. 9
1.3.2. Преобразователь трехфазной системы питания в шести- и двенадцатифазную 10
1.4. Особенности трансформаторов, применяемых в радио
и телевизионных устройствах. 12
1.5. Пик-трансформатор. 14
1.6. Электромагнитный стабилизатор напряжения. 17
1.7. Электромагнитные преобразователи частоты.. 19
Контрольные вопросы.. 22
2. Сварочные трансформаторы.. 23
2.1. Общие сведения об электросварке. 23
2.2. Характеристики сварочной дуги. 28
2.2.1. Требования к источникам питания сварочной дуги. 30
2.3.Основы теории и конструкции сварочных трансформаторов. 32
2.4. Осциллятор. 35
3. Измерительные трансформаторы.. 36
3.1. Измерительные трансформаторы напряжения и тока (общие сведения) 36
3.2. Трансформаторы тока. 39
3.2.1. Общие сведения. 39
3.2.2. Погрешности ТТ, зависимость погрешностей от различных
факторов. 42
3.2.2.1. Зависимость погрешности от первичного тока. 42
3.2.2.2. Влияние сопротивления нагрузки. 44
3.2.2.3. Влияние конструктивных параметров. 45
3.2.3. Компенсация погрешности. 45
3.2.4. Режимы работы ТТ. 48
3.2.4.1. Работа ТТ при КЗ в контролируемой сети. 48
3.2.4.2. Работа ТТ при наличии в токе КЗ апериодической составляющей. 49
3.2.4.3. Работа ТТ при разомкнутой вторичной обмотке. 51
3.2.5. Конструкция ТТ. 52
3.2.6. Выбор ТТ. 58
3.3. Трансформаторы напряжения. 59
3.3.1. Назначение и основные параметры.. 59
3.3.2. Погрешности ТН.. 61
3.3.3. Конструкция ТН.. 65
3.3.4. Емкостные делители напряжения. 71
3.3.5. Выбор ТН.. 75
Заключение. 75
Библиографический список. 76
Учебное издание
ЧЕБОТКОВ Эдуард Галактионович
(ч.1. Специальные трансформаторы)
Редактор Г.В. Загребина
Технический редактор В.Ф. Елисеева
Оригинал-макет Е.Э. Парсаданян
Подп. в печать 20.06.08.
Формат 60х84 1/16. Бумага офсетная.
Печать офсетная. Усл. п. л. 4,56.
Уч.-изд. л. 4,65. Тираж 75 экз. Рег. № 138.
__________________________________________________________________
Государственное образовательное учреждение
высшего профессионального образования
«Самарский государственный технический университет»
443100 г. Самара, ул. Молодогвардейская, 244. Главный корпус
Самарского государственного технического университета
443100 г. Самара, ул. Молодогвардейская, 244. Корпус N 8
Самарский государственный технический университет

| ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «САМАРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ» |
Кафедра «Электромеханика и нетрадиционная энергетика»
Э.Г. ЧЕБОТКОВ
П.В. ТУЛУПОВ
КОНСТРУКЦИИ И ПОТРЕБИТЕЛЬСКИЕ
СВОЙСТВА ЭЛЕКТРОМЕХАНИЧЕСКИХ
ПРЕОБРАЗОВАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА
Утверждено редакционно-издательским советом университета
в качестве учебного пособия
Самара
Самарский государственный технический университет
УДК 621. 313
Ч 34
Рецензент д-р техн. наук В.Е. Высоцкий
Ч 34 Конструкции и потребительские свойства электромеханических преобразователей переменного тока: учеб. пособ. / Э.Г. Чеботков, П.В. Тулупов. – Самара: Самар. гос. техн. ун-т, 2009. – 146 с.: ил.
Содержатся общие сведения, теоретические основы электромеханических преобразователей переменного тока. Дано описание принципа их действия, принципиальные схемы, характеристики и основные соотношения.
Предназначено для теоретических занятий и самостоятельной работы студентов, обучающихся по специальности 140601.
УДК 621. 313
Ч 34
© Э.Г. Чеботков, П.В. Тулупов, 2009
© Самарский государственный
технический университет, 2009
Предисловие
Специалисты, занимающиеся проектированием, эксплуатацией и обслуживанием электромеханического оборудования, должны хорошо понимать принцип работы и специфические особенности того или иного электромеханического преобразователя. Эти знания необходимы современному специалисту для того, чтобы самостоятельно принимать грамотные решения.
Электромеханические преобразователи предназначены для производства, преобразования и накопления электроэнергии и являются в общем случае электрическими машинами. Научные исследования и развитие электромеханики привели к созданию разнообразных видов электрических машин – источников и преобразователей энергии, которые конструктивно и по своим характеристикам отличаются от обычных электромеханических преобразователей, изучаемых в курсе «Электрические машины».
Широкое и разнообразное применение специальных электромеханических преобразователей в энергетике, автоматизации производственных процессов и во всех отраслях промышленности определяет необходимость освоения инженерно-техническим составом, работающим в этой области, теорией преобразователей, вопросами их разработки и применения.
Учебные планы технических университетов для студентов, обучающихся по специальности 140601, содержат дисциплину «Конструкции, расчет, проектирование, потребительские свойства электромагнитных устройств и электромеханических преобразователей». Учебный план и рабочие программы дисциплины предусматривают, кроме теоретического курса, практические занятия и достаточно большой объем самостоятельной работы.
Изучение специальных электромеханических преобразователей опирается на знания, полученные при изучении таких предшествующих дисциплин, как математика, физика, теоретическая и прикладная механика, теоретические основы электротехники, основы электроники и др.
Данное пособие предназначено для освоения отдельного раздела специальных электромеханических преобразователей – изучения конструкций и потребительских свойств, в частности принципа действия специальных машин переменного тока, их узлов и деталей и особенностей характеристик систем, в которых они применяются. Целью изучения данного раздела является практическое применение полученных знаний при эксплуатации, расчетах и конструировании указанных электрических машин.
Глава 1. Вспомогательные однофазные
микродвигатели переменного тока
Для маломощных нерегулируемых электроприводов в качестве вспомогательных используют микродвигатели с расщепленными экранированными полюсами и асинхронные микродвигатели с пусковыми элементами, работающие от однофазной сети переменного тока и поэтому называемые однофазными.
Для создания пускового вращающего момента в однофазных двигателях малоймощности (5-25 Вт) с расщепленными экранированными полюсами применяют конструкцию с явновыраженными полюсами (см. рис. 1.1, а), на которых располагается однофазная обмотка. Полюса 1 имеют расщепленную конструкцию, причем на одну из расщепленных частей каждого полюса надет короткозамкнутый виток (экран) в виде медного кольца 2. Ротор двигателя имеет обычную короткозамкнутую конструкцию. При подключении обмотки статора к сети под действием создаваемого ею пульсирующего магнитного потока в короткозамкнутом витке возникает ток,который препятствует нарастанию потока в этой части полюса (см. рис. 1.1, б).
В результате потоки в обеих частях каждого полюса оказываются сдвинутыми по фазе относительно друг друга, что, в свою очередь, приводит к образованию в двигателе вращающегося магнитного поля. Для улучшения пусковых и рабочих характеристик двигателя часто между полюсами помещают магнитные шунты в виде стальных пластинок.
Однофазные двигатели с явновыраженными полюсами обычно применяют в устройствах, не требующих больших пусковых моментов. Например, они применяются в небольших вентиляторах, электропроигрывателях и т. д.
Микродвигатели с расщепленными экранированными полюсами (рис. 1.2, а) в асинхронном и синхронном исполнении являются наиболее простыми однофазными двигателями переменного тока.
а б
Рис. 1.1. Однофазный асинхронный двигатель
с экранированными полюсами
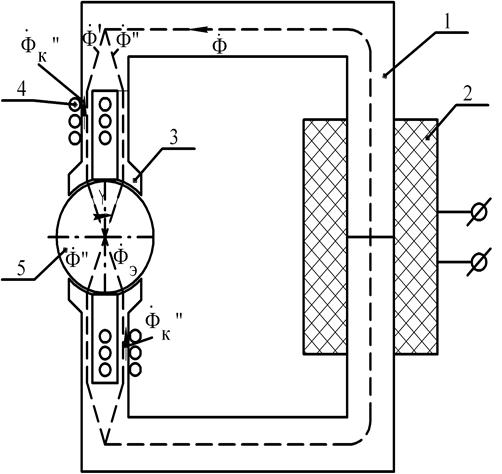
Статор 1 такого двигателя явнополюсный и состоит из двух пакетов электротехнической стали. На статоре имеется однофазная обмотка возбуждения 2. На каждом из полюсов 3 находится продольный паз, в котором размещается одна из сторон короткозамкнутых витков 4, охватывающих и экранирующих часть (от 1/5 до 1/2 полюсной дуги) полюса. В расточке полюсов помещается ротор 5 двигателя. Конструкция ротора зависит от типа микродвигателя. В двигателях асинхронного исполнения ротор типа «беличьей клетки» полый немагнитный или ферромагнитный. При синхронном варианте ротор может быть с постоянным магнитом (активный), из магнитотвердого материала (гистерезисный) или с переменным вдоль окружности магнитным сопротивлением (реактивный).
а
б
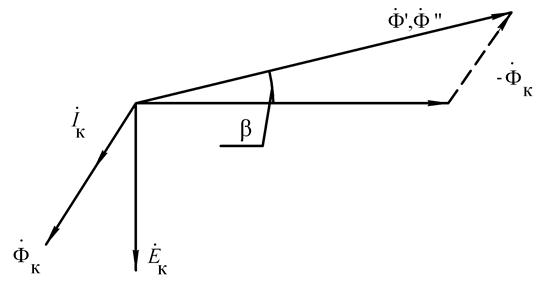
Рис. 1.2. Схема конструкции (а) и векторная диаграмма (б) однофазного микродвигателя с расщепленными экранированными полюсами
При подаче однофазного переменного напряжения на зажимы обмотки возбуждения в магнитопроводе статора создается пульсирующий магнитный поток Ф. Проходя по полюсам статора, этот поток расщепляется продольным пазом на два потока – Ф' и Ф", – сдвинутых в пространстве на угол γ. Поток Ф', замыкаясь по экранированной части полюсов, наводит в короткозамкнутых витках трансформаторную ЭДС. При этом по виткам течет ток, отстающий от ЭДС вследствие индуктивного характера сопротивления витков. Под действием МДС витков создается поток ФК, замыкающийся по экранированной части полюсов.
В сумме с потоком Ф' поток ФК образует результирующий магнитный поток ФЭ экранированной части полюсов, сдвинутый во времени относительно потока Ф" неэкранированной части полюсов:
Векторная диаграмма микродвигателя изображена на рис. 1.2, б.
Магнитные потоки Ф" и ФЭ, сдвинутые относительно друг друга в пространстве и во времени, создают результирующее вращающееся магнитное поле. Так как углы сдвига магнитных потоков Ф" и ФЭ во времени и пространстве обычно меньше 90°, а величины потоков не равны, магнитное поле будет не круговым, а эллиптическим. Вращающееся магнитное поле взаимодействует с ротором двигателя и создает вращающий момент, природа которого зависит от типа ротора.
Существенное преимущество однофазных микродвигателей с расщепленными полюсами, кроме простоты конструкции и небольшой стоимости, состоит в их надежной работе при частых пусках и остановках под напряжением. Величина полных потерь в двигателе практически не меняется при его работе в диапазоне от режима холостого хода до режима короткого замыкания (остановки








 ротора при напряжении на зажимах обмотки возбуждения). Поэтому недопустимого перегрева обмотки возбуждения не происходит. Это объясняется тем, что основными потерями в двигателе являются электрические потери в короткозамкнутых витках.
ротора при напряжении на зажимах обмотки возбуждения). Поэтому недопустимого перегрева обмотки возбуждения не происходит. Это объясняется тем, что основными потерями в двигателе являются электрические потери в короткозамкнутых витках.
Один из основных недостатков описываемых микродвигателей состоит в том, что вследствие существенной эллиптичности магнитного поля они развивают незначительный пусковой момент. Это можно пояснить на примере асинхронного микродвигателя.
Величина пускового момента в относительных единицах у асинхронных микродвигателей равна эффективному коэффициенту сигнала. Если принять за единицу пусковой момент М п0, развиваемый круговым полем с амплитудой потока Ф", то пусковой момент М преального двигателя с экранированными полюсами

В этом двигателе имеет место самый общий случай несимметрии магнитных потоков ФЭ и Ф", образующих вращающееся поле

Откуда получаем, что М П << М П0. В экранированных микродвигателях асинхронного типа пусковой момент составляет обычно 20-60% от номинального.
Аналогично можно показать, что вследствие эллиптичности магнитного поля двигатели развивают небольшую механическую мощность при относительно высоком уровне потерь. КПД у рассматриваемых асинхронных микродвигателей различной мощности не превышает 0,1-0,4. Коэффициент мощности этих двигателей 
Некоторое улучшение энергетических и пусковых характеристик можно достигнуть путем выполнения двигателя с равномерным воздушным зазором. Примером может служить микродвигатель с составным статором, изображенный на рис. 1.3. Статор состоит из цилиндра 1 и крестовины 2. Крестовина образует полюсы двигателя и магнитные шунты 3 между ними. Магнитные шунты имеют малое сечение, поэтому основная часть потока полюсов проходит через зазор в ротор. При такой конструкции магнитопровода форма распределения индукции в зазоре приближается к синусоидальной, уменьшаются потери и паразитные моменты от высших гармоник поля.
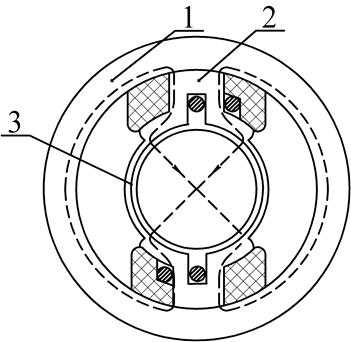
Рис. 1.3. Конструктивная схема микродвигателя
с составным статором
Рассмотренные микродвигатели относятся к нереверсивным. Однофазный микродвигатель с расщепленными экранированными полюсами, позволяющий осуществлять реверсирование, a также регулирование в определенном диапазоне вращающего момента изображен на рис. 1.4.
Микродвигатель, схема которого показана на рис. 1.4, отличается от микродвигателя на рис. 1.3, а только тем, что короткозамкнутые витки заменены катушками с выведенными концами. Четыре катушки А, В, С и D располагаются на обеих частях полюсов, охватывая каждую половину полюса.
Замыкая то одну (A, D),то другую (В, С) пару катушек, можно экранировать то одну, то другую часть полюсов, изменяя, таким образом, на противоположное направление вращения магнитного поля и ротора. Если соединить эти катушки через потенциометр R, то при нейтральном положении движка потенциометра экранирующее действие всех катушек будет одинаковым, а результирующее магнитное поле пульсирующим.
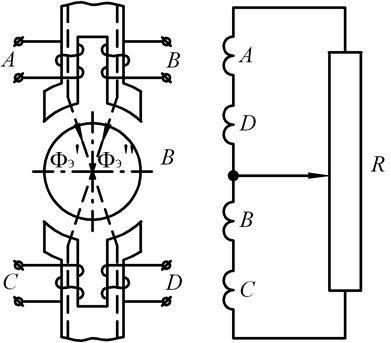
Рис. 1.4. Схема реверсивных микродвигателей
с расщепленными экранированными полюсами
При смещении движка потенциометра от нейтрального положения меняются потоки ФК экранирующих катушек обоих полюсов, а значит, и фазовый сдвиг ( ) и соотношение амплитуд (
) и соотношение амплитуд ( ) потоков ФЭ и Ф". При этом изменяется эллиптичность вращающегося магнитного поля и величина вращающего момента.
) потоков ФЭ и Ф". При этом изменяется эллиптичность вращающегося магнитного поля и величина вращающего момента.
Теоретически однофазный микродвигатель с расщепленными экранированными полюсами можно рассматривать как двухфазный двигатель, у которого угол сдвига между фазовыми обмотками не равен 90° и зажимы одной из обмоток замкнуты накоротко.
Глава 2. Специализированные
асинхронные машины
2.1. Индукционный регулятор и фазорегулятор
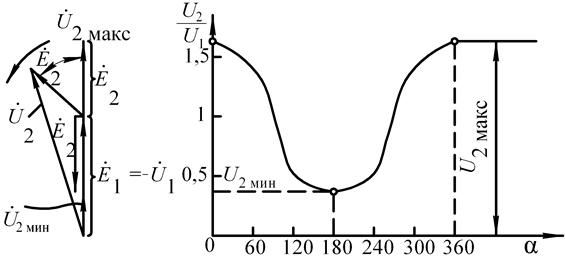
Индукционный регулятор представляет собой заторможенный асинхронный двигатель с контактными кольцами. Он может регулировать напряжение в широких пределах. Статорная и роторная обмотки в индукционном регуляторе соединены электрически (рис. 2.1), но так, чтобы они могли быть смещены относительно друг друга поворотом ротора. При подключении индукционного регулятора к сети вращающееся магнитное поле наводит в обмотках статора и ротора ЭДС Е 1и Е 2. При совпадении осей обмоток фазы ЭДС Е 1и Е 2совпадают и на выходных зажимах регулятора устанавливается максимальное напряжение U 2MАКС (см. рис. 2.2, а). При повороте ротора ось обмотки поворачивается на некоторый угол. На такой же угол смещается и вектор Е 2. При этом напряжение на выходе регулятора, равное геометрической сумме ЭДС (U 2 = Е 1 + Е 2),умень

 шается. Поворотом ротора на угол 180 эл. градусов мы устанавливаем на выходе регулятора минимальное напряжение
шается. Поворотом ротора на угол 180 эл. градусов мы устанавливаем на выходе регулятора минимальное напряжение 
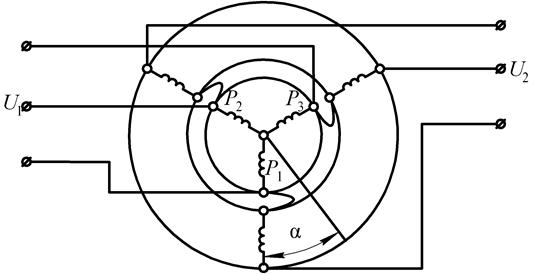
Рис. 2.1. Схема соединений индукционного регулятора
На рис. 2.2, б представлен график напряжения на выходе индукционного регулятора в зависимости от угла поворота ротора 
Индукционные регуляторы применяются для регулирования напряжения в лабораторной практике, в автоматике, а также в распределительных сетях.
Для поворота ротора в индукционном регуляторе обычно применяется червячная передача, которая одновременно осуществляет и торможение ротора.
а б
Рис. 2.2. Векторная диаграмма индукционного регулятора (а)
и график (б) зависимости 
На рис. 2.3 представлен внешний вид индукционного регулятора типа АИ61-100 мощностью 15 кВА. Регулятор имеет принудительное охлаждение, что повышает его мощность. Поворот ротора может осуществляться либо вручную маховиком, либо посредством электродвигателя, позволяющего осуществить дистанционное управление регулятором.
Фазорегулятор представляет собой асинхронную трехфазную машину с контактными кольцами, заторможенную специальным поворотным устройством (обычно червячной передачей). Онпредназначен для изменения фазы вторичного напряжения относительно первичного. При этом величина вторичного напряжения остается неизменной. Напряжение подводится к обмотке статора и снимается с выводов обмотки ротора.
В отличие от индукционного регулятора в фазорегуляторе обмотки статора и ротора электрически не соединены (см. рис. 2.4). Изменение фазы вторичного напряжения осуществляется поворотом ротора относительно статора.
Фазорегуляторы применяются в автоматике и в измерительной технике. Отечественной промышленностью изготовляются фазорегуляторы серии ФРО (фазорегулятор обдуваемый) мощностью 7,5 и 15 кВА. Плавный поворот ротора в фазорегуляторах ФРО осуществляется посредством электродвигателя, допускающего дистанционное управление фазорегулятором.
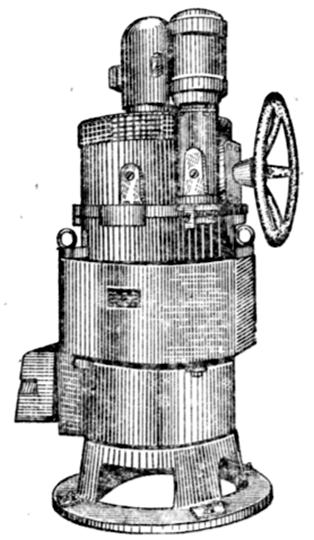
Рис. 2.3. Внешний вид индукционного регулятора типа АИ61-100
мощностью 15 кВА
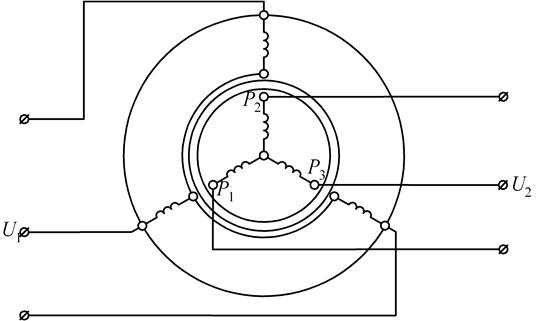
Рис. 2.4. Схема соединенийфазорегулятора
2.2. Асинхронный преобразователь частоты
Как известно, частота тока в цепи ротора асинхронной машины зависит от скольжения, т. е. определяется разностью частот вращения поля статора и ротора:
Указанное свойство позволяет использовать асинхронную машину в качестве преобразователя частоты (АПЧ). В этом случае обмотка статора подключается к сети промышленной частоты, а ротор посредством постороннего двигателя (ПД) приводится во вращение против поля статора, т. е. в направлении, противоположном его вращению при работе машины в режиме двигателя. При этом скольжение возрастет от единицы и выше, а частота тока ротора увеличится по сравнению с частотой тока питающей сети.
Если требуется уменьшить частоту питающей сети, то ротор преобразователя вращают в направлении вращения поля статора. ЭДС Е 2, наведенная в обмотке ротора, через контактные кольца и щетки подается к потребителю. На рис. 2.5 представлена схема включения асинхронного преобразователя частоты.
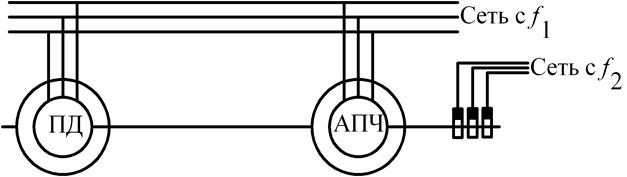
Рис. 2.5. Схема соединений асинхронного преобразователя частоты
Электрическая мощность Р' 2цепи ротора складывается из электромагнитной мощности Р ЭМ, передаваемой вращающим полем статора на ротор, и механической мощности Р МЕХ первичного двигателя ПД 
Соотношение между мощностями Р ЭМ и Р МЕХзависит от скольжения. Так, при работе АПЧ со скольжением s = 2 эти мощности равны, и ротор половину мощности получает от статора, а половину – от первичного двигателя.
При необходимости плавной регулировки частоты на выходе асинхронного преобразователя частоты в качестве первичного двигателя применяют электродвигатели с плавной регулировкой скорости, например двигатели постоянного тока. Однако чаще всего АПЧ используется для получения определенной (фиксированной) частоты f 2. В этом случае в качестве первичного применяют асинхронный или синхронный двигатель.
В главе 13 рассмотрен асинхронно-синхронный двухчастотный генератор.
2.3. Электромагнитная асинхронная муфта
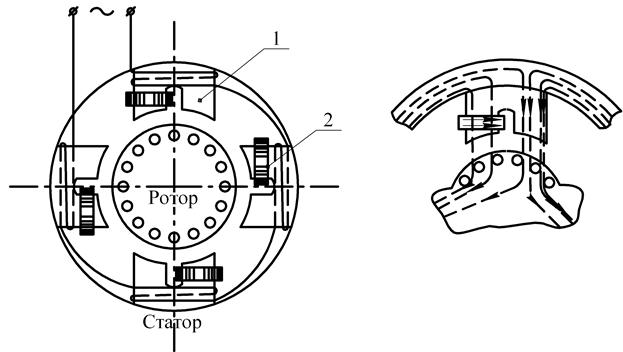
Электромагнитная асинхронная муфта устроена по принципу асинхронного электродвигателя и служит для передачи вращающего момента от одного вала (ведущего) к другому валу (ведомому). На ведущем валу 1 помещается полюсная система 2 муфты, представляющая собой систему явно выраженных полюсов с катушками возбуждения. Ведомая часть муфты 3 исполняется по типу роторной клетки асинхронного двигателя. Постоянный ток в катушки возбуждения подается через контактные кольца 4 (см. рис. 2.6).
Принцип работы муфты аналогичен работе асинхронного двигателя, только вращающийся магнитный поток здесь создается механическим вращением полюсной части. Вращающий момент от ведущего вала к ведомому валу передается через магнитный поток. Разъединение муфты производится отключением тока возбуждения. Регулирование величины тока дает возможность осуществить дистанционное управление муфтой (плавно сцеплять и расцеплять ведущий и ведомый валы). Кроме того, муфта, подобно асинхронному двигателю, при достижении максимального момента переходит в режим неустойчивой работы, что предохраняет первичный двигатель от чрезмерных перегрузок и толчков нагрузки.
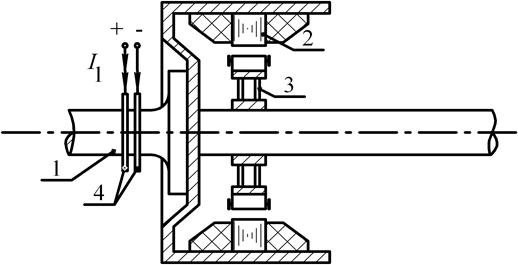
Рис. 2.6. Устройство асинхронной электромагнитной муфты
2.4. Асинхронный исполнительный двигатель
Асинхронные исполнительные двигатели применяются в устройствах автоматики и предназначены для преобразования электрических сигналов в механическое перемещение.
На статоре этого двигателя имеются две обмотки: обмотка возбуждения, постоянно включенная в сеть переменного тока, и обмотка управления, на зажимы которой подводится сигнал U c (рис. 2.7).
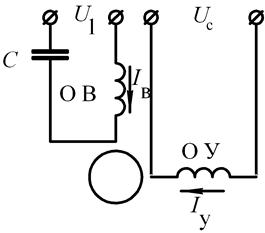
Рис. 2.7. Схема включения асинхронного исполнительного двигателя
Оси этих обмоток сдвинуты в пространстве относительно друг друга на угол 90°. В цепь обмотки возбуждения включается емкость, которая вызывает фазовый сдвиг между токами I В и I У. Все это обеспечивает создание в двигателе вращающегося магнитного поля. Если же на обмотку управления сигнал не подан, то в двигателе действует пульсирующее поле, которое не создает пускового момента.
Если же на обмотку управления сигнал был подан и двигатель начал вращаться, то после прекращения сигнала U c двигатель может продолжать работать. Это явление, называемое самоходом, недопустимо в исполнительном двигателе, так как делает его неуправляемым. Для устранения самохода ротор исполнительного двигателя делают с повышенным активным сопротивлением.
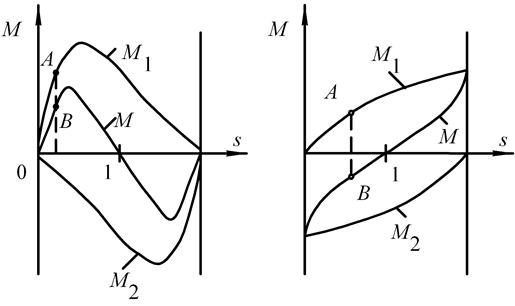
Процесс устранения самохода поясним с помощью представленных на рис. 2.8 механических характеристик однофазного двигателя.
а б
Рис. 2.8. Устранение самохода в асинхронном исполнительном двигателе
При наличии сигнала U cдвигатель работает с вращающимся магнитным полем и его механическая характеристика имеет вид кривой  на рис. 2.8, а. Допустим, что двигатель работает в режиме, соответствующем точке А. После прекращения сигнала U cполе статора становится пульсирующим и механическая характеристика двигателя приобретает вид кривой
на рис. 2.8, а. Допустим, что двигатель работает в режиме, соответствующем точке А. После прекращения сигнала U cполе статора становится пульсирующим и механическая характеристика двигателя приобретает вид кривой 
Новый режим работы двигателя определится точкой В, при этом электромагнитный момент двигателя останется положительным и ротор двигателя продолжает вращаться.
Если увеличить активное сопротивление ротора, то графики и  изменятся (максимум момента сместится в область больших скольжений). Так же изменит свою форму и график результирующего момента
изменятся (максимум момента сместится в область больших скольжений). Так же изменит свою форму и график результирующего момента  (рис. 2.8, б). Теперь после прекращения сигнала U c, т. е. при переходе исполнительного двигателя в однофазный режим, электромагнитный момент становится отрицательным (точка В) и оказывает на ротор двигателя тормозящее действие, устраняя самоход.
(рис. 2.8, б). Теперь после прекращения сигнала U c, т. е. при переходе исполнительного двигателя в однофазный режим, электромагнитный момент становится отрицательным (точка В) и оказывает на ротор двигателя тормозящее действие, устраняя самоход.
К исполнительному двигателю предъявляется также требование малоинерционности (быстродействия), т. е. чтобы с подачей сигнала на обмотку управления ротор двигателя как можно быстрее достигал установленной частоты вращения. Для удовлетворения этого требования ротор исполнительного двигателя делается облегченным, не имеющим сердечника и обмотки. Такой двигатель называется двигателем с полым немагнитным ротором (см. рис. 2.9). Вместо обмотки на роторе двигателя располагается тонкостенный алюминиевый стакан с малым моментом инерции ротора. Это обеспечивает двигателю повышенное активное сопротивление ротора, а, следовательно, устранение самохода.
Двигатель имеет два статора: внешний, с обмоткой, и внутренний, без обмотки, входящий внутрь полого ротора. Внутренний статор необходим для уменьшения магнитного сопротивления основному потоку.
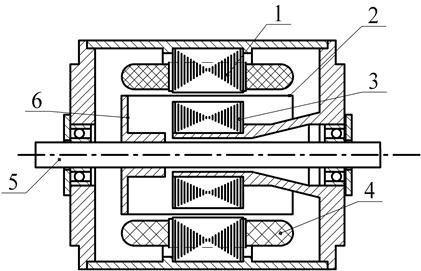
Рис. 2.9. Конструкция асинхронного двигателя
с полым немагнитным ротором:
1 – внешний статор; 2 – стакан ротора; 3 – внутренний статор; 4 – обмотка статора;
5 – вал; 6 – втулка для крепления стакана ротора
В сравнении с асинхронными двигателями обычной конструкции двигатели с полым немагнитным ротором имеют повышенные габариты и более низкий КПД. Объясняется это увеличенным воздушным зазором, который в этих двигателях складывается из зазора между внешним статором и стаканом ротора, толщины стенки немагнитного стакана и зазора между стаканом ротора и внутренним статором. Большой воздушный зазор ведет к увеличению намагничивающего тока и росту потерь.
Глава


 3. Гироскопические двигатели
3. Гироскопические двигатели
3.1. Особенности работы
электрических гиродвигателей
Главное требование, предъявляемое к гиродвигателю, – получение достаточно большого значения кинетического момента ротора. Для электрических гиродвигателей это требование наилучшим образом удовлетворяется применением обращенной конструкции машины при относительно высокой угловой частоте вращения ротора. В двигателях переменного тока это требование достигается применением повышенной частоты питания (400 Гц и более) и выбором малого числа пар полюсов.
Основной режим работы гиродвигателя – режим максимальной частоты вращения ротора, который для обычных электродвигателей является режимом холостого хода. Однако для гироскопических электродвигателей этот режим работы следует считать номинальным. Это объясняется двумя обстоятельствами, обусловленными обращенной конструкцией двигателя:
- вследствие больших габаритов и массы ротора тормозной момент сил трения о воздух и в подшипниках значительно больше, чем в обычном электродвигателе тех же габаритов;
- мощность двигателя вследствие меньшей площади, занимаемой обмоткой статора, и худших условий охлаждения значительно ниже.
Важным режимом работы для гироскопического двигателя является пусковой режим. Вследствие большого момента инерции ротора двигателя и относительно малого электромагнитного момента пуск гироскопического двигателя по времени может быть весьма продолжительным, иногда до 20-30 мин. При проектировании гироскопического электродвигателя стремятся максимально возможно сократить время пуска при обеспечении приемлемой тепловой нагрузки в процессе пуска.
Основными величинами, характеризующими работу гироскопического электродвигателя, являются:
- потребляемые мощности и ток в установившемся режиме;
- максимальная (номинальная) частота вращения ротора;
- кинетический момент – произведение момента инерции ротора на его максимальную угловую частоту вращения;
- стабильность кинетического момента при колебаниях напряжения и частоты сети в определенных пределах;
- стабильность углового положения вектора кинетического момента при длительной работе двигателя;
- максимальные значения потребляемой мощности и тока при пуске;
- время пуска;
- срок службы.
3.2. Асинхронный гироскопический двигатель
с ротором типа «беличья клетка»
Этот тип двигателя является наиболее распространенным. Асинхронный гироскопический двигатель представляет собой асинхронную электрическую машину с короткозамкнутым ротором обращенной конструкции, приведенной на рис. 2.10. На статоре 1 уложена трехфазная обмотка 2, образующая вращающееся магнитное поле. В маховик 3 запрессован магнитопровод ротора 4 с «беличьей клеткой» 5. Маховик жестко насажен на вал 6, вращающийся в радиально-упорных подшипниках 7. Статор крепится на выступе крышки 8, которая прикреплена винтами 9 к защитному кожуху 10. В кожухе для вентиляции двигателя сделаны круглые отверстия 11.
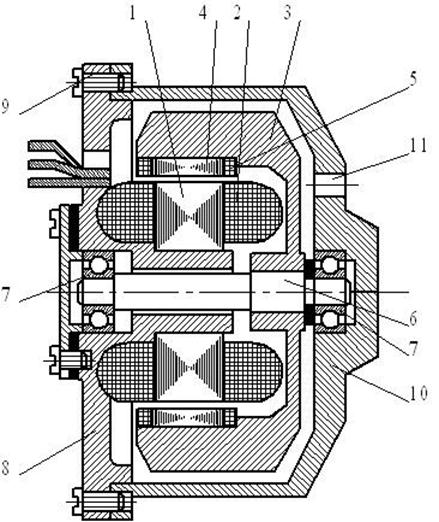
Рис. 3.1. Асинхронный несимметричный гироскопический двигатель
Рассмотренная конструкция двигателя вследствие асимметрии маховика (место крепления маховика к валу не совпадает с центром его тяжести) не обеспечивает стабильности вектора кинетического момента при изменении температуры и вибрациях, и такого типа гиродвигатель применяется в относительно «грубых» гироприборах.
Для точных гироскопических систем используют гиродвигатель с симметричным ротором и двумя внутренними статорами (см. рис. 2.11). Его можно рассматривать как совокупность двух асимметричных гиродвигателей с совмещенным маховиком. Для уменьшения трения ротора в газовой среде гиродвигатель помещается в герметичную камеру и заполняется гелием или водородом.
Принцип работы двигателя и основные электромагнитные соотношения остаются такими же, как и для обычного асинхронного двигателя при симметричном режиме работы.
Рис. 3.2. Асинхронный симметричный гироскопический двигатель:
1 – корпус; 2 – маховик; 3 – крышка; 4 – шарикоподшипник; 5 – гайка; 6 – фланец;
7 – шайба; 8 – статор; 9 – магнитопровод ротора; 10 – основной кожух;
11 – дополнительный кожух; 12 – гермовывод



 3.3. Синхронный гироскопический двигатель
3.3. Синхронный гироскопический двигатель
В качестве синхронных гироскопических двигателей, как правило, используются гистерезисные двигатели, принцип действия которых подробнее рассматривается в главе 4. Это объясняется их хорошими пусковыми свойствами и легкостью входа в синхронизм.
Синхронные двигатели с постоянными магнитами и реактивные синхронные двигатели имеют «беличью клетку» и в пусковом режиме работают как асинхронные двигатели. При достижении скорости, соответствующей некоторому скольжению, зависящему от момента нагрузки, ротор втягивается в синхронизм за счет воздействия на него синхронного момента, однако ввиду большого момента инерции маховика гиродвигателя процесс втягивания в синхронизм чрезвычайно затруднен.
В гистерезисном двигателе момент, приложенный к ротору двигателя, не зависит от скорости и остается постоянным вплоть до достижения синхронной скорости. Его величина определяется НС статора Fm, магнитным потоком Ф и гистерезисным углом. После входа в синхронизм двигатель превращается в недовозбужденный синхронный двигатель с постоянными магнитами. Для обеспечения работы гистерезисного гироскопического двигателя в синхронном режиме необходимо, чтобы момент сопротивления нагрузки был меньше гистерезисного момента.
По устройству гистерезисный гиродвигатель совершенно аналогичен асинхронному гиродвигателю. Отличие состоит в конструкции ротора. Вместо магнитопровода ротора 9 и «беличьей клетки» (см. рис. 2.11) запрессованы кольца из викаллоя соответствующей толщины, выбранной из условия получения максимального момента. Синхронные гистерезисные гиродвигатели обычно проектируются для точных гиросистем и имеют симметричный маховик и два внутренних статора.
3.4. Гироскопический двигатель типа «шар»
Следует отметить, что гироскопический двигатель типа «шар» значительно отличается от гиродвигателей на подшипниках. Одна из основных особенностей этого двигателя состоит в том, что он представляет собой электрическую машину с тремя степенями свободы ротора. Ось вращения ротора и ось вращающегося магнитного поля статора не совпадают. Это приводит к сложным электромагнитным взаимодействиям системы «статор–ротор», в результате которых к ротору, кроме вращающего момента, направленного по оси вращения, приложены так называемые корректирующие моменты, вызывающие прецессию от вращения ротора.
Принципиальная конструктивная схема шарового гиродвигателя приведена на рис. 2.12. Ферромагнитный шар 1, поддерживаемый аэродинамической опорой 3, приводится во вращение внешним магнитным полем, образуемым трехфазной обмоткой статора 2. Этот тип двигателя отличается от обычных двигателей тем, что его ротор жестко не закреплен в опорах и имеет три вращательных степени свободы.
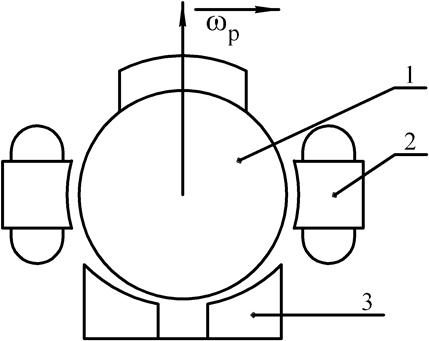
Рис. 3.3. Гироскопический двигатель типа «шар»:
1 – стальной шар; 2 – статор с трехфазной обмоткой;
3 – аэродинамическая опора
При совпадении осей вращения ротора и магнитного поля статора к шару приложен вращающий электромагнитный момент, значение которого равно в установившемся режиме моменту сил сопротивления в аэродинамических опорах. Обычно ширина пакета статора невелика, и расчет вращающего момента, создаваемого статором, можно провести по методике, разработанной для асинхронных двигателей со сплошным ферромагнитным цилиндрическим ротором. Гироскопические шаровые двигатели работают при больших номинальных скольжениях  При этом частота тока в роторе такова, что имеет место четкое проявление поверхностного эффекта.
При этом частота тока в роторе такова, что имеет место четкое проявление поверхностного эффекта.
Глава 4. Гистерезисные двигатели
Гистерезисными машинами называют машины переменного тока, основные электромагнитные процессы в которых связаны с явлением гистерезиса магнитотвердых материалов. Принципиально гистерезисные машины могут работать в режиме двигателя, генератора и электромагнитного тормоза.
Гистерезисные машины применяют в основном в качестве синхронных двигателей (СД) в автоматизированных приводах постоянной частоты вращения и в качестве гироскопических двигателей навигационных систем.
Гистерезисные двигатели являются высоконадежными, бесконтактными машинами, просты по конструкции и имеют хорошие пусковые свойства. Главный их недостаток – сравнительно низкие энергетические показатели.
4.1. Конструкции и потребительские свойства
гистерезисных двигателей
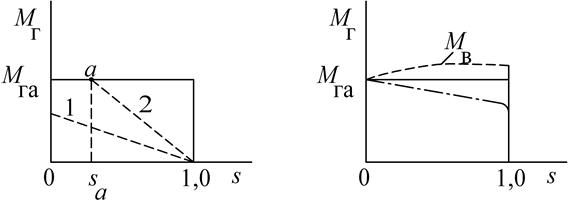
Гистерезисный двигатель имеет статор с трехфазной или однофазной обмоткой и ротор, представляющий собой цилиндр без обмотки, выполненный из магнитотвердого материала с широкой петлей гистерезиса. При подключении обмотки статора к сети возникает вращающееся магнитное поле, которое наводит в массивном роторе вихревые токи. Взаимодействие этих токов с полем статора создает на роторе вращающий момент М В, величина которого зависит от скольжения (см. рис. 4.1, кривая 1). Наибольшего значения момент достигает при неподвижном роторе (s = 1). По мере увеличения частоты вращения (уменьшение скольжения) момент уменьшается. Величина вращающего момента, вызванного действием вихревых токов в роторе, определяется выражением
где  – потери на вихревые токи в роторе двигателя при s = 1, т.е. в режиме короткого замыкания;
– потери на вихревые токи в роторе двигателя при s = 1, т.е. в режиме короткого замыкания;
 – угловая синхронная скорость.
– угловая синхронная скорость.
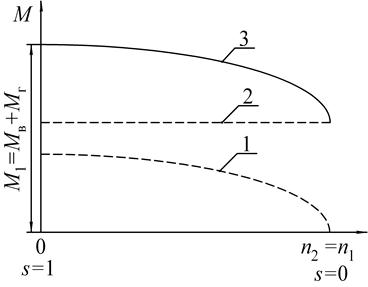
Рис. 4.1. Механические характеристики гистерезисного двигателя
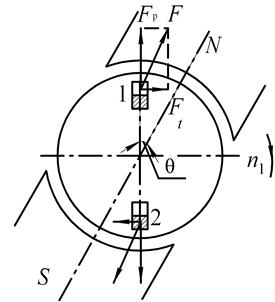
Кроме вращающего момента М В,на роторе гистерезисного двигателя возникает так называемый гистерезисный момент  , для выяснения природы которого обратимся к модели гистерезисного двигателя на рис. 4.2.
, для выяснения природы которого обратимся к модели гистерезисного двигателя на рис. 4.2.
а б
Рис. 4.2. Модель гистерезисного двигателя
В отличие от реального двигателя в рассматриваемой модели вращающееся поле создается вращением пары магнитных полюсов N — S. Ротор двигателя, находясь в поле статора, намагничивается так, что северному магнитному полюсу статора соответствует южный магнитный полюс ротора. Это видно из рис. 4.2, а, где ротор условно показан состоящим из элементарных магнитиков, ориентированных в соответствии с направлением внешнего поля. Между элементарными магнитиками и магнитом N — S возникает сила взаимодействия F, направленная по оси магнита N — S. При вращении внешнего поля происходит перемагничивание ротора. При этом элементарные магнитики как бы поворачиваются вслед за внешним полем. Но так как ротор


 выполнен из магнитотвердого материала, то вследствие магнитного запаздывания ориентировка элементарных магнитиков несколько отстает от вращения внешнего поля. Поэтому поле ротора оказывается повернутым относительно внешнего поля на угол
выполнен из магнитотвердого материала, то вследствие магнитного запаздывания ориентировка элементарных магнитиков несколько отстает от вращения внешнего поля. Поэтому поле ротора оказывается повернутым относительно внешнего поля на угол  (см. рис. 4.2, б). В этом случае силу взаимодействия F каждого элементарного магнитика с внешним полем можно разложить на составляющие: радиальную
(см. рис. 4.2, б). В этом случае силу взаимодействия F каждого элементарного магнитика с внешним полем можно разложить на составляющие: радиальную  и тангенциальную
и тангенциальную  . Составляющие
. Составляющие  от всех элементарных магнитиков создают на роторе вращающий гистерезисный момент . Величина момента зависит от величины угла
от всех элементарных магнитиков создают на роторе вращающий гистерезисный момент . Величина момента зависит от величины угла  , который определяется материалом ротора: чем шире петля гистерезиса магнитного материала ротора, тем больше величина гистерезисного момента. Например, применение магнитотвердого материала типа викаллой с широкой петлей гистерезиса дает возможность получить большой гистерезисный момент. Величина гистерезисного момента М Г пропорциональна потерям от гистерезиса в роторе при s = l, т. е. при работе двигателя в режиме короткого замыкания
, который определяется материалом ротора: чем шире петля гистерезиса магнитного материала ротора, тем больше величина гистерезисного момента. Например, применение магнитотвердого материала типа викаллой с широкой петлей гистерезиса дает возможность получить большой гистерезисный момент. Величина гистерезисного момента М Г пропорциональна потерям от гистерезиса в роторе при s = l, т. е. при работе двигателя в режиме короткого замыкания  . Так как гистерезисный момент не зависит от скольжения, то график М Г =f(s) имеет вид прямой, параллельной оси абсцисс (см. рис. 4.1, кривая 2).
. Так как гистерезисный момент не зависит от скольжения, то график М Г =f(s) имеет вид прямой, параллельной оси абсцисс (см. рис. 4.1, кривая 2).
Таким образом, вращающий момент гистерезисного двигателя можно рассматривать как сумму двух моментов: момента от вихревых токов М Ви гистерезисного момента М Г:
Вид механической характеристики M = f(s) гистерезисного двигателя (см. рис. 4.1, кривая 3) зависит от соотношения моментов M В = f(s) и M Г = f(s). Так, например, если гистерезисный двигатель имеет шихтованный ротор (набранный из листов), то ввиду небольшой величины вихревых токов момент M В практически равен нулю. При этом М М Г, т. е. двигатель работает лишь под действием гистерезисного момента. Частота вращения ротора такого двигателя равна синхронной.
М Г, т. е. двигатель работает лишь под действием гистерезисного момента. Частота вращения ротора такого двигателя равна синхронной.
Двигатели с массивным ротором работают под действием гистерезисного момента и момента от вихревых токов. Такие двигатели могут работать как в синхронном, так и в асинхронном режимах. Однако работа двигателя в асинхронном режиме весьма неэкономична, так как связана со значительными потерями на перемагничивание ротора, выполненного из магнитотвердого материала. Эти потери возрастают при увеличении скольжения (уменьшении частоты вращения). Поэтому гистерезисные двигатели обычно используются в синхронном режиме и только при малых скольжениях – в асинхронном.
Существенными преимуществами гистерезисных двигателей являются:
- простота конструкции;
- надежность в эксплуатации;
- большой пусковой момент;
- плавность входа в синхронизм;
- сравнительно высокий КПД (до 60%);
- бесшумность в работе.
К недостаткам гистерезисного двигателя, прежде всего, следует отнести неравномерность вращения и низкий коэффициент мощности, который обычно не превышает 0,45.
В целях экономии дорогостоящего магнитотвердого материала роторы гистерезисных двигателей делают сборными. В таком роторе магнитотвердый материал применяется в виде шихтованного кольца, насаженного на втулку (рис. 4.3).
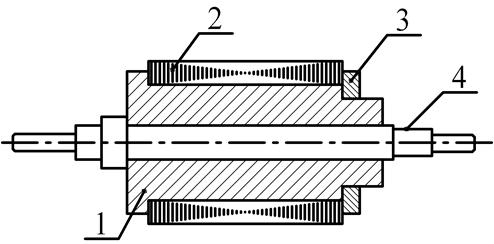
Рис. 4.3. Сборный ротор гистерезисного двигателя:
1 – втулка; 2 – шихтованное кольцо из магнитотвердого материала;
3 – запорное кольцо; 4 – вал
4.2. Гистерезисные микродвигатели
Гистерезисные двигатели обычно изготовляются на небольшую мощность (микродвигатели) и применяются в автоматике.
Синхронным гистерезисным называют микродвигатель (рис. 4.4), вращающий момент которого возникает за счет явления гистерезиса при перемагничивании ротора.
Ротор гистерезисного двигателя выполняют из магнитотвердого материала с широкой петлей гистерезиса (викаллой, альни). Причем в целях экономии дорогостоящего магнитотвердого материала ротор делают сборным (см. рис. 4.3).
При определенном соотношении между толщиной кольца 2 измагнитотвердого материала и диаметра ротора достигаются оптимальное по намагничиванию использование материала и наилучшие энергетические показатели.
Рис. 4.4. Синхронный гистерезисный микродвигатель:
1 – статор с двухфазной обмоткой; 2 – ротор; 3 – подшипниковый щит
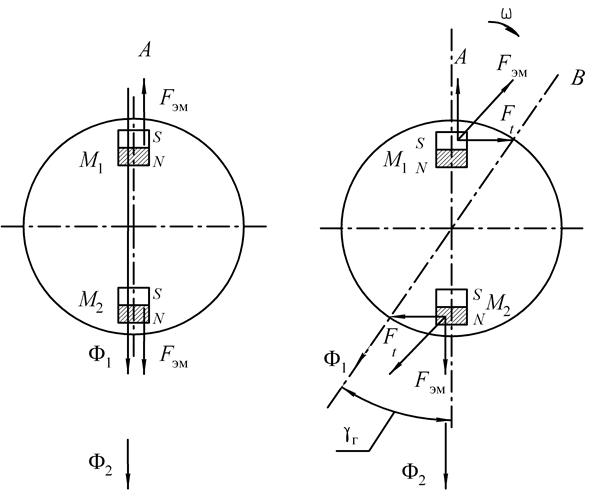
Для выяснения природы гистерезисного момента рассмотрим физические процессы, происходящие в роторе описанной конструкции при асинхронном вращении, т. е. когда материал ротора непрерывно перемагничивается (см. рис. 4.5). Будем считать, что оси МДС и потоков как в статоре, так и в роторе, совпадают. В момент времени, когда вектор вращающегося магнитного потока статора Ф1 занимает положение А (см. рис. 4.5, а), элементарные магнитики ротора ориентируются вдоль этого потока. Силы взаимодействия элементарных магнитиков, например М 1 и М 2, с потоком статора направлены вдоль этого потока и вращающего момента не создают. При перемещении потока статора в положение В в том же направлении будут поворачиваться и элементарные магнитики (см. рис. 4.5, б). Однако вследствие явления гистерезисного запаздывания магнитики М 1 и М 2 не сразу повернутся на тот же угол, что и поток Ф1, и между ними образуется угол рассогласования  (угол гистерезисного запаздывания). После этого силы взаимодействия F ЭMбудут
(угол гистерезисного запаздывания). После этого силы взаимодействия F ЭMбудут







 иметь тангенциальные составляющие Ft, которые и создадут гистерезисный момент асинхронного режима М ГА. Возникающий гистерезисный момент пропорционален векторному произведению пространственных векторов магнитного потока ротора Ф2, образованного элементарными магнитиками, и статора Ф1, которые вращаются с одинаковой скоростью со сдвигом по фазе на угол :
иметь тангенциальные составляющие Ft, которые и создадут гистерезисный момент асинхронного режима М ГА. Возникающий гистерезисный момент пропорционален векторному произведению пространственных векторов магнитного потока ротора Ф2, образованного элементарными магнитиками, и статора Ф1, которые вращаются с одинаковой скоростью со сдвигом по фазе на угол :
 ,
,
где k – коэффициент, зависящий от параметров машины.
Величины потоков Ф1 и Ф2 при симметричном, например трехфазном, питании не зависят от скорости вращения ротора. Пространственный угол , на который поток ротора отстает от потока статора, также не зависит от скорости вращения ротора и определяется той коэрцитивной силой Нс, при которой начинает изменяться направление поля элементарных магнитиков, т. е. определяется формой петли гистерезиса материала ротора. Соответственно, не зависит от скорости вращения ротора и величина вращающего гистерезисного момента М ГА.
а б
Рис. 4.5. Принцип действия гистерезисного микродвигателя
Величину гистерезисного момента определяют исходя из баланса мощностей в роторе. Мощность потерь на гистерезис в неподвижном роторе
 ,
,
где р ГУ – удельные потери на гистерезис за один цикл перемагничивания в единице объема, пропорциональные площади петли гистерезиса;
V – объем магнитотвердого материала ротора;
 – частота напряжения сети.
– частота напряжения сети.
При вращении ротора со скольжением s частота перемагничивания ротора  и потери на гистерезис в роторе равны
и потери на гистерезис в роторе равны
 .
.
Разница мощностей Р ГПи Р Г S соответствует полной механической мощности, развиваемой двигателем:
 .
.
Тогда гистерезисный вращающий момент
 ,
,
где  и
и  – частоты вращения ротора и поля.
– частоты вращения ротора и поля.
Увеличение гистерезисного момента возможно за счет выполнения ротора из материала с петлей гистерезиса, имеющей наибольшие значения коэрцитивной силы Нс и остаточной индукции Вr, а также наиболее выпуклую форму (рис. 4.6). Идеальным был бы материал ротора с прямоугольной петлей гистерезиса 1. Материалы типа викаллой и альни, как показывает кривая 2, весьма близки к этому идеалу. Обычные электротехнические стали имеют гистерезисную петлю типа 3 и не обеспечивают сколько-нибудь значительного гистерезисного момента.
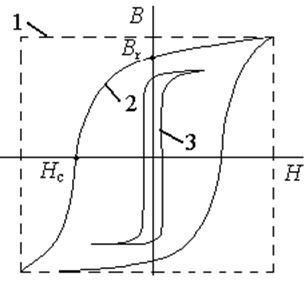
Рис. 4.6. Петля гистерезиса различных материалов
Идеальная механическая характеристика микродвигателя показана на рис. 4.7, а сплошной линией. Из этой характеристики видно, что синхронный гистерезисный микродвигатель в отличие от синхронных микродвигателей других типов имеет собственный гистерезисный пусковой момент, равный моменту при синхронной скорости ротора.
а б
Рис. 4.7. Механические характеристики гистерезисного двигателя
Механическая характеристика реальных гистерезисных микродвигателей может быть не абсолютно жесткой. Изменение гистерезисного момента в функции частоты вращения ротора (скольжения) объясняется в основном тремя факторами.
1. При неравенстве частот вращения ротора и поля в роторе наводятся вихревые токи, которые во взаимодействии с вызвавшим





 их полем Ф1 создают момент М В,являющийся по существу моментом асинхронного двигателя (пунктирная линия на рис. 4.7, б).
их полем Ф1 создают момент М В,являющийся по существу моментом асинхронного двигателя (пунктирная линия на рис. 4.7, б).
2. При конденсаторной схеме включения двухфазного гистерезисного двигателя (см. рис. 4.7, б) в однофазную сеть форма вращающегося магнитного поля статора, а значит, и величина момента М ГА(штрихпунктирная линия на рис. 4.7, б) зависят от частоты вращения ротора. При изменении частоты вращения ротора меняется частота перемагничивания и потери в роторе и соответственно ток в обмотках статора. Происходит перераспределение напряжений между конденсатором и фазовой обмоткой, и поле, круговое при одной частоте вращения (например, при s = 0), становится эллиптическим при другой (аналогично асинхронным микродвигателям).
3. Сказывается влияние моментов высших гармоник поля.
В синхронном режиме магнитное поле статора и ротор вращаются с одной скоростью и перемагничивание материала ротора не происходит. Магнитный поток ротора Ф2ост сохраняется вследствие остаточного магнетизма и вращается вместе с ротором с синхронной скоростью. Поток тем больше, чем выше значение остаточной индукции Вr. Микродвигатель работает как обычный синхронный микродвигатель с постоянными магнитами на роторе. Отличие состоит только в том, что угол отставания оси поля ротора, принимаемой за его продольную ось, от оси поля статора гистерезисного микродвигателя  не может превысить угла гистерезисного запаздывания , так как в противном случае начинается перемагничивание ротора. Следовательно, наибольшее значение момента М ГС, развиваемого гистерезисным двигателем в синхронном режиме, равно М ГА. При моменте сопротивления на валу, превышающем МГА, ротор выходит из синхронизма. У гистерезисных микродвигателей угол обычно не превышает 20-25º.
не может превысить угла гистерезисного запаздывания , так как в противном случае начинается перемагничивание ротора. Следовательно, наибольшее значение момента М ГС, развиваемого гистерезисным двигателем в синхронном режиме, равно М ГА. При моменте сопротивления на валу, превышающем МГА, ротор выходит из синхронизма. У гистерезисных микродвигателей угол обычно не превышает 20-25º.
Из изложенного следует, что синхронный гистерезисный микродвигатель развивает вращающий момент и при асинхронной, и при синхронной частоте вращения ротора. Режим его работы зависит от величины и характера статического момента сопротивления М СТна валу ротора (см. рис. 4.7, а). Если во всем диапазоне скольжений от 1 до 0 момент сопротивления (прямая 1) меньше гистерезисного момента, то двигатель работает в синхронном режиме. Ось поля ротора отстает от оси поля статора на угол , при котором соблюдается равновесие моментов М ГС = М СТ. Если момент сопротивления меняется по прямой 2, то равновесие моментов наступит при скольжении sa, соответствующем точке а, т. е. двигатель будет работать в асинхронном режиме (М ГА = М СТ). Однако использование гистерезисных микродвигателей в асинхронном режиме неэкономично вследствие больших потерь на перемагничивание ротора, особенно при больших скольжениях.
Синхронные гистерезисные микродвигатели обладают весьма ценными качествами. Они развивают большой пусковой момент и способны входить в синхронизм при большом моменте инерции нагрузки. Ротор гистерезисного двигателя входит в синхронизм плавно, без рывков благодаря практически постоянной величине пускового гистерезисного момента за весь период пуска от s = l до s = 0. Потребляемый гистерезисным двигателем ток незначительно (на 20-30%) изменяется при изменении режима работы от короткого замыкания (пуск) до холостого хода, что позволяет эффективно использовать гистерезисные двигатели в повторно-кратковременном режиме. Гистерезисные микродвигатели просты по конструкции и надежны в эксплуатации.
Синхронные микродвигатели выпускают как для работы в системах с постоянной частотой напряжения сети, так и с переменной.
Первые применяются в таких приборах и установках (звукозаписи, телевидения и т. д.), где требуется постоянная частота вращения при изменении момента сопротивления в определенных пределах. Изменение синхронной частоты вращения ротора этих двигателей возможно только переключением обмоток статора на другое число пар полюсов. Следует отметить, что свойством полисинхронизма, т.е. способностью одного и того же двигателя работать при различном числе полюсов обмотки статора, среди синхронных двигателей обладают только гистерезисные микродвигатели. У них число полюсных зон на роторе автоматически получается равным числу полюсов на статоре. Во всех остальных синхронных микродвигателях число полюсов на роторе фиксируется конструктивно.
Двигатели второго типа рассчитаны на плавное или дискретное регулирование синхронной частоты вращения ротора за счет изменения частоты питающей сети. Двигатели с плавным регулированием частоты применяют в основном в системах синхронной связи.
К синхронным микродвигателям, используемым в системах звукозаписи, звуковоспроизведения и т. д., предъявляются жесткие требования по уровню создаваемых звуковых шумов. Для сравнения различных синхронных микродвигателей по этому показателю выделим основные причины шумов.
1. Шумы механического происхождения возникают в результате вибраций за счет динамического небаланса ротора, работы подшипников и скользящих контактов.
2. Шумы аэродинамического происхождения появляются в результате воздушных завихрений при вращении ротора.
3. Шумы магнитного происхождения возникают в результате вибраций магнитопровода под действием переменных электромагнитных сил, обусловленных в основном изменением магнитного сопротивления потоку вдоль окружности ротора.
В соответствии с изложенным наименьший уровень шумов может быть достигнут у гистерезисных микродвигателей, имеющих симметричный в механическом и магнитном отношении ротор с гладкой поверхностью. Наибольшим уровнем шумов обладают реактивные микродвигатели с явнополюсным ротором.
Синхронные микродвигатели часто используют в технологическом оборудовании и бытовых приборах в качестве двигателей общего применения. Из рассмотренных синхронных микродвигателей наиболее просты по конструкции и технологии изготовления и сравнительно дешевы в производстве реактивные микродвигатели, которые выполняются из недорогих магнитомягких материалов.




 На рис. 4.8 представлены рабочие характеристики гистерезисного двигателя.
На рис. 4.8 представлены рабочие характеристики гистерезисного двигателя.
4.3. Энергетические показатели
гистерезисных машин
Энергетические показатели гистерезисного микродвигателя не особенно высоки ( ), так как поток ротора является вторичным, наведенным рабочим потоком статора и работа такого двигателя соответствует режиму синхронной машины с недовозбуждением. Низкие энергетические показатели гистерезисных машин и, в частности, гистерезисных двигателей – главный их недостаток.
), так как поток ротора является вторичным, наведенным рабочим потоком статора и работа такого двигателя соответствует режиму синхронной машины с недовозбуждением. Низкие энергетические показатели гистерезисных машин и, в частности, гистерезисных двигателей – главный их недостаток.
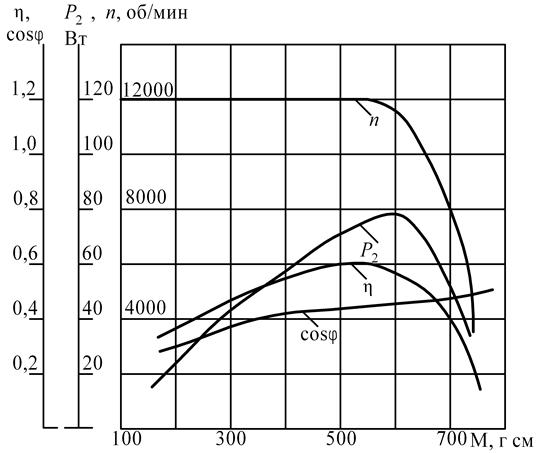
Рис. 4.8. Рабочие характеристики гистерезисного двигателя
Низкие энергетические показатели связаны с большим реактивным намагничивающим током, потребляемым обмоткой статора из сети. В асинхронном режиме это обусловлено большим магнитным сопротивлением гистерезисного слоя из магнитотвердого материала.
Поясним это на примере зависимости тока I 1 гистерезисного микродвигателя в синхронном режиме от напряжения возбуждения U 1, при снижении последнего от величины U 1П,при которой происходит пуск (см. рис. 4.9). Величина возбужденной МДС ротора определяется напряжением пуска U 1П, а величина результирующего потока двигателя уменьшается пропорционально U 1. Значит, при уменьшении U 1/ U 1П возрастает роль МДС ротора в создании результирующего магнитного поля и меняется величина и характер тока статора. Индуктивная намагничивающая составляющая тока статора ( > 0) постепенно уменьшается до нуля (
> 0) постепенно уменьшается до нуля (








