 2014-02-13
2014-02-13 2402
2402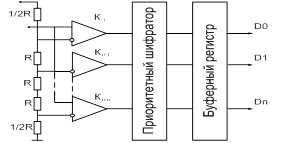
Принцип работы состоит в том, что входное напряжение подается на все не инвертирующие входы компараторов, на инвертирующие входы подаются опорные напряжения соответствующие уровням дискретизации, которые образованы резистивным делителем опорного напряжения. Для нижнего компаратора (К0)
К1  К2
К2 
К2 Так как каждый из компараторов срабатывает только от своего уровня, то при подаче входного напряжения одновременно срабатывает столько компараторов начиная с нулевого и заканчивая тем компаратором у которого величина входного напряжения превышает его опорное в пределах значения DU. На выходе компараторов образуется линейно нарастающий код который с помощью приоритетного дешифратора преобразуется в двоичный. Так как компараторы срабатывают одновременно, то время преобразования минимально (около t≤100 мс). Количество компараторов на входе связано с разрядностью на выходе: i =2n-1. Выбор типа преобразователя зависит от характера изменения аналогового сигнала, если процесс медленный применяется АЦП последовательного типа, если процесс быстрый – АЦП параллельного типа.
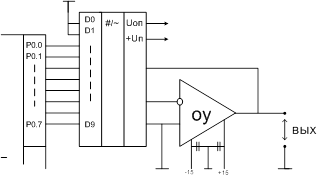
Рассмотрим АЦП типа К1113ПВ1 последовательного типа, со временем преобразования tпр≤30мкс.
Восемь старших разрядов АЦП присоединяются к порту Р1, управление АЦП осущ. по входам Г/П и Г/Д, которые соответственно присоединены к входам контроллера INT0 и Р3.0. на выходе Р3.0 контроллер формирует импульс длительностью не менее 2мкс, который определяет начало процесса преобразования при этом фронтом импульса гасятся предыдущие значения, а по срезу запускается процесс преобразования. По окончанию времени преобразования АЦП выдаёт сигнал Г/Д (Готовность/Данные), срезом которого инициируется прерывание по INT0, после чего контроллер осуществляет процедуру чтения данных с выхода АЦП порт Р1. Далее процесс циклически повторяется при этом время пуска АЦП определяется либо таймером контроллера, либо программными метками.
Программа работы АЦП.
0000H LJMP BEGIN SETB IE.7
0003H PRER0: MOV R1, P1 WAIT: JNB 20H, M1
SETB 20H CALL CONTROL
CLR TCON.1 CLR 20H
RETI M1: SJMP WAIT
BEGIN: CLR TCON.0 CONTROL: SETB P3.0
SETB IP.0 MOV R7,#03
SETB IE.0 M2: DJNZ R7, M2
CALL COTROL CLR P3.0 RETI
Вывод аналоговых данных
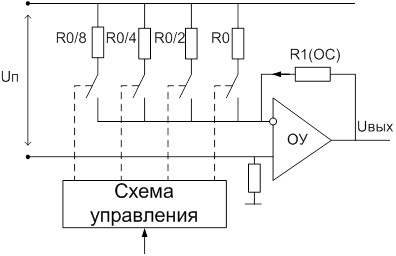
Для преобр цыфр данных поступающих в порт МК анал сиг кот исп для управл устройствами и механизмами, работающими по аналоговому принципу, используется ЦАП, в основе раб ЦАП лежит сх суммирующего операц усилителя, кот суммирует вх токи протекающие через матрицу двоичновзвешанных резисторов на входе. Матрица выполняет роль преобразователя цифр кода в ток
Коэф К = -Uвых/Uвх = -Rос/Rвх
К0 = -R1*Z(S0)/R0 К1 = -2*R1*Z(S1)/R0 К2 = -4*R1*Z(S2)/R0

При раб ЦАП состояние ключей S0-S3 определяется знач подаваемого двоичного кода

Для построения многоразрядного ЦАП необходима матрица резисторов с большим диапазоном изменения сопротивления матрицы


поскольку сделать матрицу с таким разбросом резисторов сложно, на практике примен др тип матр, имеющую два наминала резисторов R и 2R. В такой матрице резист соед последов – параллельно и прим ложная сх коммутации резисторов, но в любом случае такая матрица формирует любой ток.
 Для получ Uвых достаточно в порт контроллера подать необходимый код, Uвых устанавливается через инт времени Тзадержки, на переключение ключей матрицы.
Для получ Uвых достаточно в порт контроллера подать необходимый код, Uвых устанавливается через инт времени Тзадержки, на переключение ключей матрицы.
Временная организация режима обработки информации
Большинство автомат-ых сис хар-я согласованностью времени обработки инф, включая ввод – выв со скоростью изм хар-к или парам объекта (процесса). Сист обраб инф, получающая исход данные обрабатывающая их по соответствующей программе, выдаёт полученные результаты с такой скоростью, кот обеспечит своевременную реакцию сист на изменения, происходящие в объекте(процессе). Такую сист обраб назыв сист, работающей в режиме реал времени. Резул расчетов могут оказаться непригодными, если в промежутке между приемом и выдачей инфы происходило существенное изменение технич условий. Реал время – такой ход процесса при котором обработка инф в УМК осуществляется в соответствии с работой управл объекта без нарушения устойчивости его работ. Для раб в реал реж врем требуется знать: 1) Абсолютное время (час, месяц, год) 2) Относительное время
Зная время, можно решить следующие задачи: 1) Запуск программы в опред время или по истечении зад промежутка 2) Циклический запуск прогр через устан промеж времени 3) Установка времени ожидания в процессах 4) Контроль времени выполнения программы и др………
Взаимодействие общих устройств с УМК
Ввод инф с датчиков. Опрос двоичного датчика (ожидание события)
Самыми распространенными сист явл двоичные датчики, их состояние опред 0 или 1. они бывают контактными и бесконтактными
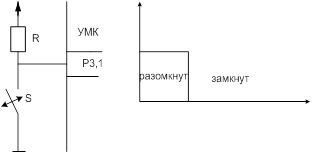
Процедуры размыкания и замыкания контактов.
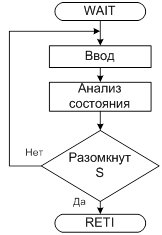
1) Процедура ожидания размыкания
WAIT0: JNB P1.3, WAIT
2) процедура ожид замыкания ключа
WAIT1: JB P1.3, WAIT
Если необходима реакция УМК только мом разм или замыкания, то вых дат необходимо подкл ко входу прерывания.
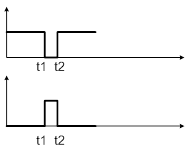
3) Процедура ожидания импульсного сиг
В этом случае проц должен обнаружить как факт появления, так и факт исчезновения сигн
Данную проц можно орг с помощью процедур ожидания.
А) WAIT1: JB P1.3, WAIT
WAIT0: JNB P1.3, WAIT
Б) WAIT0: JNB P1.3, WAIT
WAIT1: JB P1.3, WAIT
Примечание: длит имп не должна быть меньше чем длинна ожидания,
т.е. Тп= Т2-Т1 > 2мкс
Программные способы борьбы с дребезгом контактов
При использ контактных дат сущ риск появления дреб контактов
В отетственных случаях для формирования бездребезгового сиг примен триггер либо компаратор с гистерезисом.
Программ спос борьбы с дреб контактов
1) подсчет заданного числа совпадений сиг
2) применение врем задержки
1- многократное считывание сиг с контакта; подсчет удачных опросов; если после нескольких опросов случается неудачный опрос, то цикл опроса начинается заново. Контакт считается устойчиво замкнутым, если последовало N удачных опросов
Блок-схема алгоритма такой процедуры
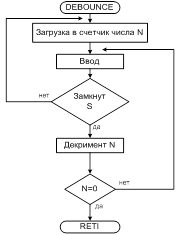
DBNC: MOV R3, #N
DBNC1: JB P1.3, DBNC
 DJNZ R3, DBNC1
DJNZ R3, DBNC1
RETI
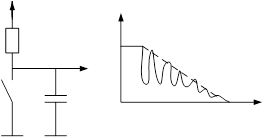
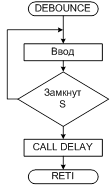
2- применение временной задержки, когда программа обнаружив первое замыкание контактов запрещает опрос состояния на время кот больше переходного процесса
DBNC: JB P1.3, DBNC
CALL DELAY
RETI
Подсчет числа импульсов
В многих управляющих программах решается задача представляющая ожидания уставки событий, представленных последовательностью символов от дат. Сущ 2 типовые процедуры 1) подсчет числа импульсов между двумя событиями 2) подсчет числа имп за время
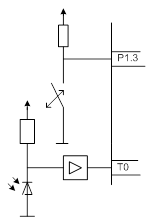
Подсчитать кол-во деталей на конвеере между началом пуска, ключ S-замкнут и окончанием, ключ S-разомкнут. Детали подсчитываются с помощью фотоэлектронного дат, присоединенного к входу таймера Т0. Сост ключа анализируется по входу Р1,3.
MOV TMOD, #00000100
MOV TH0, #0
WAIT0: JB P1.3, WAIT0
SETB TR0
WAITC: JNB P1.3, WAITC
CLR TR0
MOV A, TH0
Если ТС устанолен на фунц таумер, то резул счета будет определять длит приода между двумя собятиями. Для Эл.мех сист такая задача решается для опред периода частоты вращ вала.
Подсчет числа импульсов за заданный промежуток времени
1) прогр реализ врем интервала и подсчета числа имп
2) прогр реализ врем интервала и аппаратный счет имп с помощью Т/С
3) прогр реализ врем интервала и прогр подсчет имп
4) прогр реализ врем интервала и аппаратный подсчет
1- неэффективен
2- 3- альтернативн и прим в простых контроллерах с одним таймером
3- самый эффективный
ограниением для аппаратного способа явл скорость счета таймера кот зав от частоты шины данных МК, для МК51 длительность имп при счете =1мкс, для увелич длит аппаратных задержек осущ повторным запуск таймера с контролем числа включений. Расм пример (подсчет кол-ва имп за заданный интервал врем)
MOV R0, #HIGI TIME
MOV R1, #LOW TIME
MOV TMOD, #01010001B;– настройка Т/С0-таймер, Т/С1-счетчик режим1
CLR A
MOV TH1, #0
MOV TL1, #0
MOV TH1, R0
MOV TL1, R1
MOV TCON, #50H;– запуск таймеров и счетчиков
WAIT: JBC TF0, EXIT
SJMP WAIT
EXIT: CLR TR0
CLR TR1
Во многих случаях контроллер связан не с одним датчиком,а с группой автономных дат (логически не зависимые или взаимосвязанные, формирующие единый двоичный код), при этом МК выполняет процедуру опроса дат и передает управление. Сравнение принятого кода с заданным может осуществляться операцией искл или, либо спец командой сравнения двух величин (CJNE).
MOV A, # CODE; запись заданного кода
WAIT: CJNE A, P1, WAIT; сравнение кода с числом Р1
Опрос матрицы датчиков
Такая задача возникает, если кол-во дат больше числа входов в контроллер(при присоединении клавы). Рассм пример с подключением к МК матрицы 8 на 8(64 клавиши)
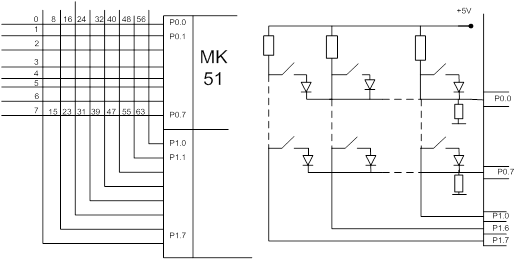
Одним из вариантов схемной реализации матрицы кон-в – схема в кот каждый из 64 датчиков представлен простым кон-м, отключенным последовательно диодам. Диоды необходимы чтобы устранить одновременное нажатие. Один конец контакта через резистор-4,3кОм,- общий для всего столбца, присоединен к источнику питания.
Катоды диодов присоединены к одному из контактов порта Р0, при незамкнутых кон-х все линии порта Р0 подключены к общей шине через резисторы.
При нажатии на любой контакт на соответс линии создается высокий потенциал (лог 1). Основная задача – определить, какой из Конт-в замкнут на данной линии. Для этой цели исп порт Р1, сиг на вводах которого последовательно сканирует столбцы матрицы, поэтому все столбцы назыв линиями сканирования, а все строки линиями опроса. Сиг сканировании осущ смещением лог «1»,начиная со старшего разряда Р1,7. Через порт Р0 считывается состояние каждого дтчика в данном столбце. Замкнутое сост кон-а счит линией запроса порта Р0 в виде лог «1» только в том случае, если в данном столбце присутствует активный сиг сканирования в виде лог «1». В противном случае сост клавиши считывается как лог «0», т.о. полный цикл опроса матр осущ за 8 сдвиго байта сканирования.
Считанные данные запоминаются в 8-байтовом ОЗУ с побитовой адресацией
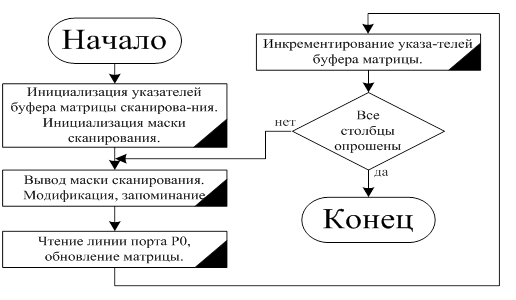 Блок схема алгоритма
Блок схема алгоритма
В области ОЗУ выделяем 2 заполненные битом матрицы, одна из которых отображает текущее состояние (адрес 00Н – 64Н), вторая-предыдущее состояние. В качестве указателя буфера матрицы используются регистры R0 и R1, в которые при инициализации заносятся начальные адреса ячеек.
MOV R0, #20H; -иинициализация указателей матрицы
MOV R1, #28H; -иинициализация указателей матрицы
MOV A, #80H; -иинициализация маски сканирования
MOV Р1, А; -вывод маски
RR A; -сдвиг вправо(модификация маски) R0, R1
MOV R2, A; -запоминание модифицированной маски
MOV A, P0; -чтение порта Р0
XCH A, @ R0; -запись текущего значения
MOV @ R1, A; -запись предыдущего значения
INC R0; -инкрементирование указателя
INC R1; -инкрементирование указателя
MOV А, R2; -выбор следующего столбца
JNB Acc.7,SCAN; -проверка окончания
«ВЫХОД»
Данная программа в большинстве случаев является процедурой обслуживания прерываний, которая появляется при нажатии любой кнопки. Для этой цели все лишние чтения матрицы Р0 с помощью логической схемы 8 или-не. Нажатие любой клавиши вызывает появление высокого уровня на линии порта Р0 и соответственно нужного уровня на входе прерываний. По адресу вектора внешнего прерывания записывается команда перехода на начальный адрес процедуры сканирования матрицы. Для защиты от дребезга контактов в начало процедуры сканирования можно записать необходимую временную задержку.
Практическая реализация цифровых датчиков и аналоговых сигналов
Цифр дат – дат, формирующий вых сиг, приним только два сост, обычно вхдная инфа такого датчика это сиг типа вкл/выкл, полученный контактным либо безконтактным способом, либо сравнением контролируемой физ вел с пароговым значением. Т.к. инфа на вых либо0, либо 1, такие датчики наз двоичными. Контактные датчики всегда содержут элмагн контакт каких либо коммут аппаратов, например: реле, пускатели, контакторы…
Инф дат получается путем коммутации S источника питания. Это может быть Uпит самого МК, либо какое либо др напряжение, и в последнем случае,это должно согласовываться по уровню с напр пит МК. Вых сиг контактных дат должен подергаться обработки с целью защиты от дребезга. Безконт цифр дат реализ на осн различных физ эффектах: 1) на основе дат Холла 2) магнитодиодов 3) магниторезисторов
2 – оптронных устройств ипольз пары: светодиод – фотодиод; светодиод –фототранзистор
3 – индуктивные датчики, такие датчики выпускаются в виде готовых индуктивных элементов. Кроме того безконт дат можно реализовать, использую чувствительные элемен др физ вел: например:
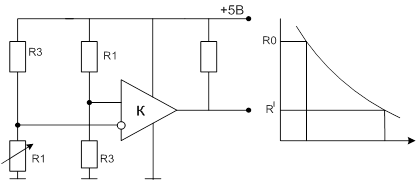
терморезисторы – поскольку сиг такого дат явл анал, т.е. непрерывным, значит в схему вкл пороговй элемент, например компаратор
Пороговый датчик температуры
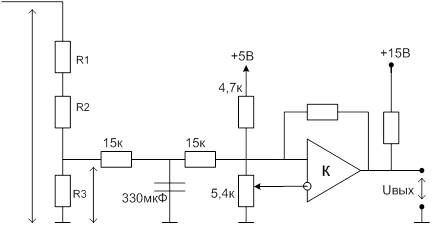
Пороговый датчик тока
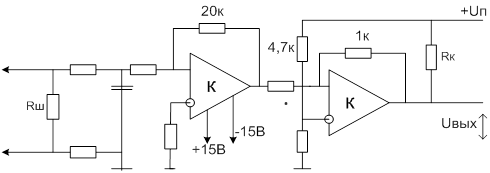
Т.к. Uвых шунта довольно мало и обычно составл при Iном шунта сооотв 75млВ, желательно данный сиг усилить
Вых сиг шунта проходит через RC фильтр и подается на вход усилителя DA1 с Ку=10 с вых усил сиг поступ на компаратор с положительной ОС. Необходимая вел опорного напряжения устанавливается переменным резистором, по налогич сх строится датик напряжения
Инф о напряжении, кот может находиться в диапазоне 300-600В с помощью делителя напряжния до уровня Uмакс на входе компаратора, дальше ставится RC фильтр и компаратор. Данная сх применима не во сех случаях, поскольку цепь измерения(компаратор - МК) имеет общ потенциал с силовой цепью. При сросе нижнего плеча делителя на вход схемы может попасть выс напряжение.
Датчики состояния силовых вентелей
Для управл полупроводн преобразователями в некоторых случаях необходима инфа о сост силовых ключей. Закрытому сост обычно соответствует, а открытому - падение напр ΔU прибл =0,6В 1,5В. Пример: контроль состояния двух последовательно вкл теристоров в схеме преобразователя.
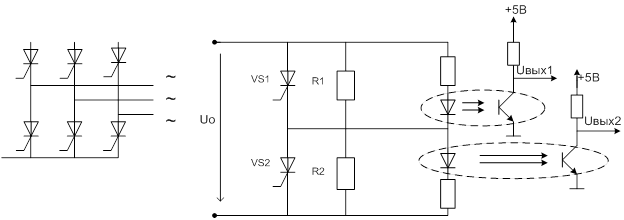
Один из вариантов дат сост двух последов вкл тиристоров явл сх исследования оптронов. В закр сост выс потенциал на анодх теристора определяет ток через светодиоды оптронов, кот ограничивается резисторами Rогр.
При вкл сост теристоров когда напряжение на аноде резко увелич светодиоды не излучают. Если транзисторы оптронов включены с общим эмитором, то закр сост тронз сотв низкий потенц на вых оптрона, а открытому – высоий.
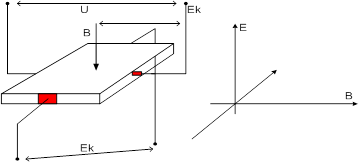
Датчик на основе эффекта Холла
Элемтом Холла наз полупр структура, генерирующая на своем выходе ЭДС Холла при условии, что в направлении перпендикулярном плоскости действует вектор маг индукции и через нее пропускается пост ток.
В сист управл широко применяется двоичные датчики положения и сост, кот представляет собой элементы Холла в качестве переменных элементов и встроенного усилителя, компаратора, сиг на вых кот изменяется под действием магнитного поля, такие элем выполняют функцию электронных ключей. Они находят применение в датчиках тока и напряжения, скорости и напрвл вращения, угла поворота и конечного сост. Широко применяется в бесконтактных Эл двиг, бесконт сист зажигания, устройствах аварийной сигнализации, в качестве бесконтактных выкл.
Структурная схема ключа с элементом Холла:
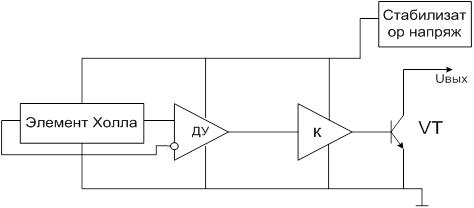
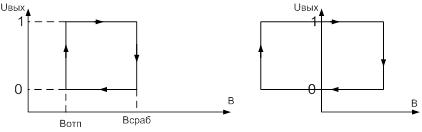
В зависимости от реакции на воздействия магн поля различают униполярные и биполярные, в унипол дат уровень напряж на вых зависит от значения индукции магн поля одного направления, в биполярном дат уровень вых напряж изменяет свою величину как от индукции, так и от напряжения
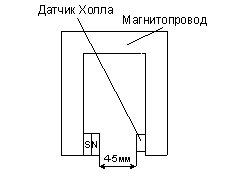 датчики могут сопрягаться с цифр микр сх (ТТЛ, КМОП) во многих случаях выпускается специализированные датчики Холла, в качестве дат положения и скорости, кот имеет кроме дт Холла П-образную магн сист и постоянный магн
датчики могут сопрягаться с цифр микр сх (ТТЛ, КМОП) во многих случаях выпускается специализированные датчики Холла, в качестве дат положения и скорости, кот имеет кроме дт Холла П-образную магн сист и постоянный магн








